
Fターム[2F065BB22]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 光学的性状 (975) | 透明体 (521)
Fターム[2F065BB22]に分類される特許
121 - 140 / 521
物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法
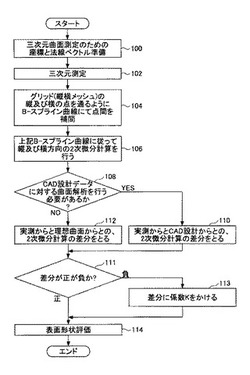
【課題】本発明は、物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法に関し、物体の三次元の表面形状を評価するうえでその表面に形成される反射歪みの定量的な検出を可能にすることにある。
【解決手段】対象物体の三次元の表面形状のデータを取得させると共に、その取得された表面形状のデータの2次微分値を算出させる。また、対象物体に要求される三次元の仮想形状データを算出させると共に、その算出された仮想形状データの2次微分値を算出させる。そして、その算出された対象物体の三次元の表面形状の2次微分値と、仮想形状データの2次微分値との差を算出させ、その差に基づいて、対象物体の表面形状を評価させる。
(もっと読む)
ロボットの把持装置

【課題】ロボットの組立作業において、ワークの把持動作を確実に行う。
【解決手段】把持部材2a、2bの間にワークWを把持する工程において、各把持部材2a、2bに設けられた接触押圧部21a、21bがワークWを押圧して把持することによって発生する光学縞を検出して、把持力の制御を行う。このとき、把持部材2aに設けられたワーク有無検出部22aがワークWに接触することによって発生する光学縞を検出することで、把持部材2a、2bの間にシート状のワークWが有ることを確認する。
(もっと読む)
光学式寸法測定装置
【課題】簡易な構成でありながら、有効測定範囲を認識可能で高精度な測定を実現できる光学式寸法測定装置を提供する。
【解決手段】レーザビームを出力する発光部10と、レーザビームによりワークXが配置される測定領域を走査する走査部20と、測定領域を通過したレーザビームを受光する受光部30と、受光部30で得られた走査方向の明暗パターン(受光信号)からワークXの寸法を算出する寸法算出プログラム512と、を備えた光学式寸法測定装置100において、レーザビームの走査中における点灯区間及び消灯区間をユーザ操作により設定するためのキーボード48と、設定された点灯区間及び消灯区間におけるレーザビームの点灯制御を行う点灯制御プログラム511と、を備え、寸法算出プログラム512は、点灯区間を測定領域中の有効測定範囲とし、有効測定範囲における受光信号からワークXの寸法を算出する。
(もっと読む)
複屈折基板の板厚測定法及び板厚測定装置
【課題】複屈折基板の板厚を正確に求める板厚測定法を得る。
【解決手段】予め複屈折基板の板厚tと反射干渉光強度波長特性の振幅の節に対応した波
長λ(t)との関係を求めるステップと、前記基板の反射干渉光強度波数特性を取得する
ステップと、前記反射干渉光強度波数特性の節より波数の大きい領域の前記反射干渉光強
度波数特性のデータに対し、相隣接する2つのデータのうち波数の大きい側のデータから
波数の小さい側のデータを減じ、それに−1を乗じた値を求め、この値を波数の小さい側
のデータに加算した新データで、波数大きいデータを置換して補正反射干渉光強度波数特
性を求めるステップと、前記補正反射干渉光強度波数特性にFFT処理を施して、複屈折
基板の板厚を求めるステップと、を含む複屈折基板の板厚測定法である。
(もっと読む)
面形状計測装置
【課題】計測ヘッドを走査して形状計測するには、傾斜角および変位量の双方を検出する必要があり、計測ヘッドが大型化し、重量も重くなるため、計測ヘッドの小型化および軽量化に有利な技術を提供する。
【解決手段】被検面の形状を計測する面形状計測装置は、基準点から光を放射し被検面10で正反射して戻ってくる被検光と参照光との干渉を検出することによって基準点と被検面との間の距離を計測するための計測ヘッド110と、計測ヘッドを走査する走査機構と、計測ヘッドを使って計測された垂直距離と前記基準点の座標とに基づいて被検面の形状を計算する処理部とを備え、処理部は、基準点の座標を(s,t,u)、基準点から被検面までの垂直距離をq、前記被検面上の点の座標を(x,y,z)としたときに、(x,y,z)=(s,t,u)−q(α,β,γ)(α,β,γ)=(∂q/∂s,∂q/∂t,∂q/∂u)に基づいて被検面の形状を計算する。
(もっと読む)
基準マークを有する光透過性基材及び光透過性基材を位置合わせする方法
物品は、複数の機能素子及び一体化した基準マークを含む光透過性基材を含む。基材は、全反射の臨界角、並びに基準面を画定する長さ及び幅を有する。基材は、主表面に配置される一体化した基準マークを含む。一体化した基準マークは、基準面に垂直である基準線と共に第1の半角及び第2の半角のそれぞれを画定する第1及び第2の円錐台形の表面によって形成される少なくとも1つの実質的に楕円状の特徴部を含む。第1及び第2の半角は、度で表される全反射の臨界角を90度から差し引いたもの以下である。方法は、本開示による光透過性基材を提供することと、マシンビジョンシステムを用いて基準マークの位置を精密に検出することと、基材を光学的に精密に位置合わせすることと、を含む。  (もっと読む)
(もっと読む)
弱い光及び蛍光の光の用途において信号対ノイズ比、解像度、又は合焦品質を犠牲にすることなく検査速度を最適化するための方法
【課題】電子部品の高いスループットの自動的検査を可能にする、高速オートフォーカスの方法を提供することである。
【解決手段】強い光、弱い光、及び蛍光の光の用途における、要素の光学検査中の検査速度を最適化する方法。自動収束メカニズムと、高速度CCDカメラと高開口数(NA)光学部品とを組み合わせたときに、優れた信号対ノイズ比、解像度、及び検査の速度性能を達成する、蛍光及び非蛍光用途に対して最適化された方法が記載される。
(もっと読む)
オートコリメータを用いた光学素子の偏心調整方法及び偏心測定方法、並びにレンズ加工方法
【課題】オートコリメータを使用したレンズの偏心測定精度を改善する。
【解決手段】オートコリメータ100を用い、かつ光軸を有する光学素子1を回転させて上記光学素子における上記光軸と回転軸との偏心を調整する偏心調整方法であって、光源130が発する光束から回折光学素子112によりそれぞれ異なる次数の回折光131,132を上記光学素子の光学作用面1a及びフランジ面1cに照射し、受光部120で検出された検出結果から、上記光学作用面における光軸と上記光学素子の上記回転軸とが一致するように上記光学素子を位置決めする。
(もっと読む)
ストッパの長手位置を決定するための配置
本発明は、液状薬剤(M)の半透明の薬剤容器(1)のコンパートメント(5)をシールするためのストッパ(4)の長手位置を決定するための配置及び方法に関する。配置は、円形光源(8)及び光感受性センサ(7)を含み、ここで光源(8)又はセンサ(7)は、薬剤容器(1)の長さの少なくとも一部に広がる薬剤容器(1)に接して横方向に配置可能であり、ここでそれぞれの他の光源(8)及びセンサ(7)は薬剤容器(1)の先端周りに円形状に配置可能である。光源は薬剤容器中に光を放射するように配置される。光は薬剤又は薬剤容器(1)により散乱され、センサ(7)により検出される。センサ(7)はストッパ(4)の位置を検出するためにプロセッサユニットに連結される。 (もっと読む)
光学検査装置、及びこれを利用した検査方法
【課題】検査効率を向上させる光学検査装置を提供する。
【解決手段】支持ユニット100には検査対象物10が載置される。第1照明ユニット400は、短波長を有する第1光を生成して検査対象物10に向けて照射する。撮像ユニット200は、第1光が照射される検査対象物10を撮像する。これと共に、光学検査装置1000は、短波長の光を照射して検査対象物10を撮像するので、検査対象物10に形成された透明パターンの不良検査が可能である。
(もっと読む)
検査装置および検査方法
【課題】測定対象の幅方向に対して広範囲で欠陥を検出する。
【解決手段】第1のミラー群12に入射されたレーザ光の波面は、分割されて反射され、光学フィルム10の幅方向に配列された状態で光学フィルム10に照射される。光学フィルム10に照射されたそれぞれのレーザ光の波面は、光学フィルム10を介して第2のミラー群13で反射され、光学フィルム10を介して、第1のミラー群12に対して入射される。第1のミラー群12に入射されたレーザ光は、再び1つの波面が揃い、ウェッジプレート4に入射される。そして、ウェッジプレート4の第1の面S1で反射されるとともに、第2の面S2で反射されることにより2つの波面に分割される。2つの波面が干渉することにより、撮像部7において干渉縞が撮像され、撮像された干渉縞の画像データに対して、解析部8による解析が行われる。
(もっと読む)
露光方法及び露光装置、並びにデバイス製造方法
【課題】複数の基準座標系相互間のずれを較正する。
【解決手段】 ステージWST1上に搭載された4つのヘッド601〜604のうち、互いに異なる1つのヘッドを含む3つのヘッドが属する第1ヘッド群と第2ヘッド群とに含まれるヘッドがスケール板上の対応する領域に対向する領域A0内で、第1ヘッド群を用いて得られる位置情報に基づいてステージWST1を駆動するとともに、第1及び第2ヘッド群を用いて得られる位置情報を用いて対応する第1及び第2基準座標系C1,C2間のずれ(位置、回転、スケーリングのずれ)を求める。その結果を用いて第2ヘッド群を用いて得られる計測結果を補正することにより、第1及び第2基準座標系C1,C2間のずれが較正され、4つのヘッド601〜604のそれぞれが対向するスケール板上の領域の相互間のずれに伴う計測誤差が修正される。
(もっと読む)
画像パターン認識システム及び方法
【課題】画像特徴ベクトルを使用した画像パターン認識用のシステム及び方法を提供する。
【解決手段】画像特徴部に見つけられるベクトルに対応する、それぞれのベクトルインデックスを格納するため、ベクトルセットが生成される(ステップ210)。画像特徴部に対する各ベクトルの相関関係が計算される(ステップ215)。画像特徴部に対する各ベクトルの相関関係が対応のベクトルインデックスとともにベクトルセットに格納される(ステップ220)。次に特定される画像のために、上記トレーニング段階が繰り返される(ステップ225)。新しい画像の候補領域が特定される(ステップ230)。候補領域におけるベクトルに対応する特別のベクトルセットへの相関関係の平均が計算される(ステップ235)。候補領域が一若しくは複数のベクトルセットにより表される特徴部を示す可能性を判断するために、上記平均が評価される(ステップ240)。
(もっと読む)
ガラス基板位置特定方法およびそれに用いられる装置
【課題】ガラス基板上の位置を特定するためのマークを不要のものとし、しかも、正確に位置を特定することができるガラス基板位置特定方法およびそれに用いられる装置を提供する。
【解決手段】ガラス基板1の頂点14を構成する2辺の、この頂点近傍の位置と向きとを検知してこの頂点14の位置を特定し、特定された頂点の位置の少なくとも2つから、ガラス基板の位置と向きとを特定する。
(もっと読む)
変位計の測定方法
【課題】被測定物の表面に設けられた透光部材を介して被測定物の変位を測定する場合であっても高精度に測定することができる変位計の測定方法の提供。
【解決手段】変位計1は、被測定物としての半導体ウェハ2に向かって光を射出するとともに、半導体ウェハ2にて反射される光を受光することで半導体ウェハ2の変位を測定するものである。半導体ウェハ2の表面には、透光性を有する平面状のダイシングテープ3が設けられている。変位計1にて半導体ウェハ2の変位を測定する場合には、まず、ダイシングテープ3の屈折率と略同一の屈折率を有する液体4を、ダイシングテープ3の表面に塗布する。そして、液体4、及びダイシングテープ3を介して半導体ウェハ2の変位を測定する。
(もっと読む)
蛍光発光を使用するガラス容器壁厚測定
【課題】ガラス容器中の応力曲線に加えて応力層の厚さおよび壁厚の両者を迅速かつ正確に確定するために蛍光発光を使用する、ガラス容器壁中の応力および壁の厚さを測定するための装置および方法が開示される。
【解決手段】本装置および方法を、ガラス容器の全周囲にわたるガラス容器側壁中の応力および側壁の厚さの両者を迅速かつ正確に測定するために使用することができる。本装置および方法は、大規模ガラス容器製造に適合され、ガラス容器の側壁中の応力および側壁の厚さの高速測定が可能である。
(もっと読む)
光学式膜厚計及び光学式膜厚計を備えた薄膜形成装置
【課題】高い精度で光学膜厚及び分光特性の計測が可能な光学式膜厚計及び光学式膜厚計を備えた薄膜形成装置を提供する。
【解決手段】光学式膜厚計は、投光器11と、反射ミラー17と、受光器19と、分光器20とから構成されており、測定光の入射方向に対して実基板Sの逆側に、測定光の光軸に対してほぼ垂直に反射面を配設された反射ミラー17を備えている。また実基板Sは、測定光の光軸に対して所定の傾き角度を有して配設される。測定光(出射光と反射光)が実基板Sを2回透過することになり、透過率(光量)の変化量を大きくすることができ、膜厚測定の制御精度を向上させることができる。また透過位置の違いによる測定誤差の発生を防止することができ、また、測定基板を所定の経路を通って2回透過していない測定光が受光器19側で検出されることがなくなるため、高い精度で光学膜厚及び分光特性の計測ができる。
(もっと読む)
三次元形状測定装置及び三次元形状測定方法
【課題】被覆膜の厚さと独立して、基板よりも反射率の低い被覆膜付きの基板上に存在するパターンの三次元形状を非破壊で測定することができる三次元形状測定装置を提供することである。
【解決手段】可視光に対して透明な被覆膜付きの基板上に設けられた不透明なパターンの物理的三次元形状を測定する三次元形状測定装置であって、第1波長の照明光と、前記第1波長と異なる第2波長の照明光とを切り替えて照射する光源部と、前記第1波長の照明光を照射したときの前記パターンと前記被覆膜との第1仮想段差と、前記第2波長の照明光を照射したときの前記パターンと前記被覆膜との第2仮想段差とを測定する光検出器と、前記第1仮想段差と前記第2仮想段差とに基づいて、前記パターンの物理的三次元形状を決定する処理部とを備える。
(もっと読む)
基板保持装置、欠陥検査装置及び欠陥修正装置
【課題】第8世代や第10世代のガラス基板に対する欠陥検査や欠陥修正に対応できる基板保持装置を実現する。
【解決手段】本発明による基板保持装置は、固定端とテンション端との間に張架されると共に第1の方向に沿って延在する支持ワイヤ(7〜10)を含む複数のワイヤ支持機構(3〜6)と、ワイヤ支持機構の各支持ワイヤに対して第1の方向に沿って移動可能に連結されたステージ(30)と、ステージを第1の方向に案内するガイド手段(44)と、ステージを第1の方向に沿って移動させる駆動装置(51,53)とを具える。ワイヤ支持機構の各支持ワイヤは、同一の平面内において互いに平行に張架され、複数の支持ワイヤ上に基板が載置された際、当該ステージは、支持ワイヤ上に載置された基板の裏面と直接対向しながら第1の方向に移動する。ステージは、基板の裏面と直接対向しながら第1の方向に移動するので、支持ワイヤによる影響を受けることなく各種処理を行うことができる。
(もっと読む)
非球面体測定方法および装置
【課題】測定対象となる非球面体が鍔状の平面部を有していない場合でも、面ずれおよび面倒れを高精度に測定できるようにする。
【解決手段】第1干渉計1Aと第2干渉計1Bとを用いた光干渉計測により、非球面レンズ9の第1レンズ面91および第2レンズ面92の各中心部の形状データを求め、各々の形状データから、第1レンズ面91の第1臍点P1、第1曲率中心および第1軸線の各位置データを第1測定座標系において求めるとともに、第2レンズ面92の第2臍点P2、第2曲率中心および第2軸線の各位置データを第2測定座標系において求める。これらの各位置データと、第1測定座標系および第2測定座標系の相対位置関係とに基づき、非球面レンズ9の面ずれおよび面倒れを求める。
(もっと読む)
121 - 140 / 521
[ Back to top ]