
Fターム[2F065BB22]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 光学的性状 (975) | 透明体 (521)
Fターム[2F065BB22]に分類される特許
41 - 60 / 521
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置

【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
膜厚むら検査装置及び方法
【課題】検査に適切な明るさやコントラストの画像を取得し、膜厚むら検査装置及び方法を提供する。
【解決手段】表面に皮膜が形成された基板を一方向に移動させながら、基板に形成された皮膜の膜厚むらを検査する装置及び方法であって、皮膜の厚みを検出する膜厚検出部を備え、光源部は、撮像部側に配置された反射照明部3aと、基板を挟んで撮像部に対向する位置に配置された透過照明部3bを備え、撮像部4は基板との相対角度を調節する撮像部角度調整手段を備え、反射照明部は反射照明部と基板との相対角度を調節する反射照明角度調整手段を備え、透過照明部は透過照明部と基板との相対角度を調節する透過照明角度調整手段を備え、膜厚検出部からの膜厚情報に基づき、反射照明角度調節手段及び透過照明角度調整手段を制御し、反射照明の光量及び透過照明の光量を調節する制御部を備えたことを特徴とする膜厚むら検査装置及び方法。
(もっと読む)
表面性状評価方法
【課題】被検体の表面から反射光が得られないような場合であっても、被検体の表面性状を確実に測定でき、歩留まり及び製造効率の向上を図ることができる表面性状評価方法を提供する。
【解決手段】ウエハWをセットしていない状態において、第1参照平面56で反射された第1参照光と、ウエハWをセットした状態において、ウエハWを透過して後に第1参照平面56で反射された被検光と、に基づいてウエハWの表面性状を評価することを特徴とする。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
透明基板の検査装置、透明基板の検査方法、及びガラス基板の製造方法
【課題】ガラス基板や透明な樹脂基板等を含む透明基板の検査を効率化できる透明基板の検査装置、透明基板の検査方法、及び前記透明基板の検査方法でガラス基板を検査する検査工程を有するガラス基板の製造方法を提供する。
【解決手段】検査装置10は、透明基板72の断面及びその周辺部に、斜め方向から光を照射する照明手段11aと、前記照明手段11aから照射された光の透過光を受光し、前記断面の画像を撮像する撮像手段12aと、前記撮像手段12aが撮像した前記断面の画像に基づいて、前記断面の面積を算出する画像処理手段13と、を有する。
(もっと読む)
マーク検出装置、基板検査装置およびマーク検出方法
【課題】透明基板に設けられたフィデューシャルマークを確実かつ容易に検出する。
【解決手段】フィデューシャルマークMが設けられた検査対象基板10の一方の面に光を照射すると共に、基板10の一方の面を撮像した撮像データに基づいてマークMを検出する際に、緑色、青色および黒色のうちのいずれかの色で形成された有色半透明シート9bを基板10の他方の面に接するように配設すると共に、少なくともシート9bに対する接触面が黒色および緑色のいずれかの色で形成された有色不透明シート9aをシート9bにおける基板10に対する接触面の裏面に接するように配設した状態において、他方の面がシート9bに接するように配設した基板10の一方の面にLED光源21から赤色光L1を照射すると共に、単色画像データを出力可能な撮像部22によって基板10の一方の面を撮像し、撮像部22から出力された単色画像データに基づいてマークMを検出する。
(もっと読む)
中心ずれ測定装置及びその方法
【課題】中央部に円孔を有する円盤状基板の内周と外周の中心ずれを測定する時間を短縮可能な、中心ずれ測定装置及びその方法を提供すること。
【解決手段】中央部に円孔を有する円盤状基板Wの内周と外周の中心ずれを測定する中心ずれ測定装置であって、内周端面C1と外周端面C2に挟まれた主平面Sの半径方向幅Bを、投光部と受光部との間に形成された計測領域DA内で円盤状基板の全周にわたって非接触で計測する計測部と、前記計測部によって計測された半径方向幅Bの最大値Bmaxと最小値Bminの差Aを演算して該差Aを用いて中心ずれを演算する演算部とを備えることを特徴とする、中心ずれ測定装置。
(もっと読む)
光学的計測装置
【課題】位相シフト法による干渉縞を用いた高さ計測装置において、位相シフト画像に内包する各種ノイズ成分の影響を抑制し高精度な光学的計測装置を提供する。
【解決手段】測定対象物の測定面の高さと上記測定面の高さに応じた複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との関係を所定の演算式に数式化するとともに、上記測定対象物の測定面の高さと測定面の高さに応じた上記複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との組合せを、同数式化した所定の演算式に基いて演算し、この演算により求めた位相情報を位相コード変換テーブルに反映させることによって、上記測定対象物の測定面の高さを計測する。
(もっと読む)
被検面形状測定方法および被検面形状測定装置と被検面形状測定プログラム
【課題】干渉計の撮像素子から出力される被検面のシェア像を利用し、被検面の形状に関わりなく其の実面形状を直接的に把握すること。
【解決手段】波面分布面Wを区画して得た各微小セルW1〜WC1毎の波面分布面側法線k1〜kC1の各々が干渉計1による測定時に被検体13の球心Oに収束する光路を辿って被検面13aに入射した照明光(入射光)の何れかの反射光の光路と一致することに基いて、波面分布面Wの微小セルW1〜WC1における波面分布面側法線k1〜kC1すなわち被検面13aからの反射光に相当する波面分布面側法線k1〜kC1毎に、これに対応する照明光波面側法線l1〜lC1つまり入射光の光路を突き止め、これら2つの光路すなわち波面分布面側法線k1〜kC1と照明光波面側法線l1〜lC1の交点位置R(1)〜R(C1)を求めて被検面13aの実面形状のデータとする。
(もっと読む)
タイヤ形状計測方法及びタイヤ形状計測装置
【課題】タイヤが走行しているときの接地形状及び接地面近傍を含むタイヤの表面形状を精度よく計測する。
【解決手段】タイヤTを路面11の走行路11aを構成する透明な強化ガラス板G上に接地させるとともに、強化ガラス板Gの表面に設けられた路面プールに白色の液体Lを投入し、移動機構163のボールねじ163aを回転させて路面11を保持するガイド部材162をガイドレール161に沿って前後方向に移動させながら、強化ガラス板GのタイヤTが接地する側とは反対側に設けられたCCDカメラ14により液体L中を走行するタイヤTの形状を撮影し、この撮影された画像からタイヤTの形状を計測するようにした。
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
ガラス基板の欠陥検査方法、ガラス基板の欠陥検査装置、及びガラス基板の製造方法
【課題】従来よりもガラス基板の欠陥の検査感度を向上可能であり、かつ、欠陥を検査する時間を短縮できるガラス基板の欠陥検査方法及び欠陥検査装置、並びに、前記欠陥検査方法又は前記欠陥検査装置を用いたガラス基板の製造方法を提供する。
【解決手段】本ガラス基板の欠陥検査方法の一形態は、第1主平面及びその対向面である第2主平面を有するガラス基板に、複数方向から光を順次照射し、前記ガラス基板の画像を順次撮像する順次撮像工程と、前記順次撮像工程で順次撮像した各ガラス基板の画像に基づいて、前記ガラス基板の前記第1主平面及び前記第2主平面の欠陥の有無を検査する欠陥検査工程と、を有する。
(もっと読む)
カラーフィルタの製造方法、及び当該カラーフィルタ
【課題】ガラス基板上に小型マスク連続露光方式により露光して第1層を形成することができるカラーフィルタの製造方法を提供する。
【解決手段】形成工程10は表面に第1層が形成されていないガラス基板にアライメントマークをレーザマーキングにより形成する。塗布工程20はアライメントマークが形成されたガラス基板の表面に感光性を有するレジストを塗布する。露光工程30はレジストを塗布されたガラス基板を搬送しつつガラス基板の裏面側からアライメントマークを読み取ることにより、露光ヘッド33、34の位置を調整しながらガラス基板の表面を小型マスク連続露光方式により露光する。現像工程40は露光されたガラス基板の表面を現像して第1層を形成する。
(もっと読む)
光位相測定装置、光位相測定方法およびプログラム
【課題】参照光の位相設定精度に限界がある場合でも、測定対象物による位相シフト量を用いた計測する光位相測定装置を提供する。
【解決手段】コヒーレント光源81、光源よりの光波を2分岐する光分岐手段82、光波のうちの参照光波89を周波数ωmで位相変調する位相変調手段83a、分岐された後に被測定対象物85を透過又は反射した信号光波と位相変調された参照光波89とを合成する光合成手段97と、合成された干渉光の強度を測定する光強度測定手段88を有する光干渉計を備えた光位相測定装置で、干渉光の強度を一定の時間に亘って取得し、取得した時系列の強度信号をフーリエ変換し、位相変調の周波数ωmの整数倍の周波数成分のうち少なくとも2つの成分の光強度を演算して、位相変調手段の変調指数mを同定して、該変調指数mに基づいて前記被測定対象物85による信号光波の位相変化量φを算出する演算手段95を備えた光位相測定装置。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
光学系の光学面の間隔を測定する方法及び装置
【課題】本発明の目的は、単レンズ又は多レンズ光学系の光学面の間隔が確実かつ高精度に測定され得る装置及び方法を指定することである。
【解決手段】多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法の場合に、光学系のセンタリング状態は、光学系(38)の少なくとも2つの光学面(S1、S2、S3)を考慮することにより記録される。光学系(38)は、センタリング状態を考慮して、光学系(38)の光軸(40)が参照軸(34)とできる限り揃うように調節される。次のステップでは、光学面(S1、S2、S3)の間隔が、短コヒーレンス干渉計(24)を用いて決定される。この目的のために光学系(38)に向けられる測定光線(50)は、参照軸(34)に沿っている。試験片(38)の事前の調節により、光学系の少なくとも2つの光学面を考慮して、高精度の測定が得られる。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】少ない数の検出用光源部であっても、広い領域にわたって対象物体の位置を検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、第1検出用光源部12Aおよび第2検出用光源部12Bから検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出部30で受光して対象物体Obの位置を検出する。第1検出用光源部12Aおよび第2検出用光源部12Bは、検出対象空間10RからX軸方向で離間しており、光検出部30は、検出対象空間10Rから第1検出用光源部12Aおよび第2検出用光源部12BよりY軸方向で離間している。このため、検出光L2が対象物体Obで正反射して光検出部30に入射するような対象物体Obの特異位置を、よりX軸方向の外側にシフトさせることができる。
(もっと読む)
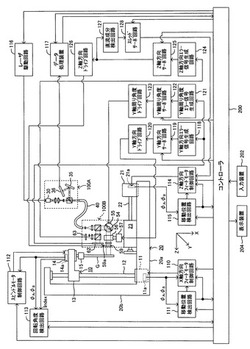
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
41 - 60 / 521
[ Back to top ]