
Fターム[2F065DD16]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 破損防止;測定器の保護 (118)
Fターム[2F065DD16]に分類される特許
41 - 60 / 118
偏光コントローラ、干渉計及び光画像計測装置

【課題】光ファイバに対して安定的に圧力を付与し、光ファイバを通過する光の偏光状態の経時的変動を抑える。
【解決手段】偏光コントローラ1000は、回転部1020の平面部1021とブロック1030の平面部1032とを光ファイバ2000に当接させ、調整ネジ1100によって回転部1020とブロック1030とを相対的に移動させることにより、平面部1021と平面部1032との間隔を変更して光ファイバ2000に圧力を印加する。更に、偏光コントローラ1000は、サブファイバ3000を有している。サブファイバ3000は、平面部1021と平面部1032との間に配置され、光ファイバ2000と略等しい径を有する。
(もっと読む)
測定システムおよび干渉計

【課題】産業機械と干渉計とが衝突してしまうことを防止できる測定システムを提供すること。
【解決手段】移動体21と干渉計3とが接近しすぎるなど、移動体21に取り付けられた反射体41に対する測定においてなんらかの異常があった場合、干渉計3の判定手段7が受光信号に基づいて、反射体41に対する測定において異常があると判定し、干渉計3の停止命令出力手段52が産業機械2に停止命令を出力する。そして、停止命令が入力された産業機械2の停止手段231が移動機構22の駆動を停止させ、移動体21の移動を停止させる。従って、移動体21と干渉計3とが接近しすぎるなど、移動体21の測定においてなんらかの異常があった場合、産業機械2の停止手段231が移動機構22の駆動を停止させることとなるので、産業機械2と干渉計3とが衝突してしまうことを防止することができる。
(もっと読む)
追尾式レーザ干渉計
【課題】再帰反射体を見失ってしまっても測定を再開できる追尾式レーザ干渉計を提供すること。
【解決手段】第1判定部521により第1,第2受光手段のうち少なくとも一方の受光手段の受光量が所定の第1閾値以下と判定された場合、パターン射出制御部54が、光源からの光が所定のパターンに沿って射出されるように変更機構121を制御する。そして、パターン射出制御部54により変更機構121が制御され、光源からの光が所定のパターンに沿って射出されている間に、第2判定部522により各受光手段の受光量が共に所定の第2閾値以上と判定された場合、追尾制御部51が変更機構121に再帰反射体11を追尾させる。従って、干渉計1は、再帰反射体11を見失った場合、所定のパターンに沿って光を射出して再帰反射体11を探索し、再帰反射体11を検出した場合には再び再帰反射体11を追尾でき、測定を再開できる。
(もっと読む)
半導体ウエハの外観検査方法、及び、外観検査補助装置
【課題】 本発明は、半導体ウエハの下面の外観異常箇所が、何れの半導体素子領域に存在しているかを正確に識別することができる外観検査方法を提供することを目的とする。
【解決手段】 複数の半導体素子領域52が形成された半導体ウエハ50の下面50bの外観異常を検査する方法であって、半導体ウエハ50の下面50bに各半導体素子領域52を示す映像を投影した状態で、半導体ウエハ50の下面50bの外観異常箇所56を目視で特定する検査工程を有する外観検査方法。
(もっと読む)
光モジュール及び光モジュールの作製方法
【課題】2つの光デバイスの端面間の距離を高精度に測定して光接続した光モジュール及びその作製方法を提供する。
【解決手段】光モジュール100は、第1PLC110と第2PLC120の2つのPLCを接続して構成されている。そして、第1PLC110および第2PLC120を跨いでMZI回路101が形成されている。MZI回路101は、一部が第2PLC120に形成され、他の部分が第1PLC110に形成されている。MZI回路101を端面距離測定用光回路として用い、これにより端面間距離Dを高精度に測定することが可能となる。
(もっと読む)
内部アルキン含有樹脂を用いたひずみセンサ
【課題】簡略化されたプロセスによるひずみセンサ材料を提供することを課題とする。
【解決手段】下記一般式(1)で表される内部アルキン含有樹脂を提供する。
【化1】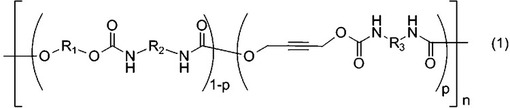
(式中、R2およびR3はそれぞれ独立に置換されていてもよいアルキル基、置換されていてもよいアリール基を示し、pは0<p<1である。nは平均重合度である。R1は樹脂化合物を構成する高分子鎖を示す。)
提供された内部アルキン含有樹脂を用いて、これを被測定物の表面に貼着し、ひずみセンサとして用いることにより、簡略化されたプロセスによるひずみセンサが提供される。
(もっと読む)
光ファイバセンサケーブル
【課題】歪検知用光ファイバ心線に対して、局所歪を低減し、センサの信頼性の長期化を図ることが可能な光ファイバセンサケーブルを提供する。
【解決手段】歪検知用光ファイバ心線11と、温度補償用光ファイバコード12と、抗張力体13とが所定の撚りピッチで相互に撚り合わされ、これらがシース樹脂14で被覆されてなる光ファイバセンサケーブル10であって、スパン200mmの光ファイバセンサケーブルから歪検知用光ファイバ心線11を引き抜き速度100mm/minで引き抜くときの引き抜き力をF(単位N/200mm)、前記撚りピッチをP(単位mm)とするとき、2≦F≦25かつ30≦P≦700の条件、または25<F≦35かつ200≦P≦700の条件のいずれかを満足する。
(もっと読む)
光学式測定装置
【課題】軟質の被測定物に対してダメージを与えることを防止でき、かつセンサの検出能力の安定化を図ることができるとともに、作動距離の長い対物レンズを使用できる光学式測定装置を提供すること。
【解決手段】光学式測定装置1は、対物レンズ61を、被測定物が載置されたテーブル40に対して移動させて被測定物の画像を撮像し、被測定物の撮像画像から被測定物の寸法等を測定する。この光学式測定装置1は、対物レンズ61の周囲に設けられて対物レンズ61への物体の接近を検出する反射型光電センサ62と、反射型光電センサ62によって物体への接近を検出した場合に、対物レンズ61の物体への衝突を回避する衝突回避手段3とを備えている。
(もっと読む)
ワーク計測装置、衝突防止装置および工作機械
【課題】ワークと工作機械の一部との衝突を防止する際に用いるワーク形状の3次元データを容易に取得することができるワーク計測装置、衝突防止装置および工作機械を提供する。
【解決手段】加工対象であるワークを加工する工具が取り付けられる主軸に取り付けられ、非接触で前記ワークまでの距離を走査して測定する測定部15と、空間を多面体状に分割して形成された3次元メッシュ構造を生成し、測定された前記ワークまでの距離情報に基づいて、ワークの測定点座標を算出し、3次元メッシュ構造の一単位と対応するワークの位置を走査した回数に対する、算出した測定点が一単位に含まれる回数の比率が所定の閾値以上のときに、一単位は前記ワークの形状であるとして測定形状マップを作成する形状認識部23と、が設けられていることを特徴とする。
(もっと読む)
対象物を撮像する方法
本発明は、対象物の照射、及び対象物が位置する区域からの光の検出、並びに検出された光に基づく画像の形成を含む対象物を撮像する方法に関し、対象物の照射は、撮像平面又は空間内の画素を区別し、かつこれらの画素に対応する対象物の部分を別々に照射し、同時にこれらの対象物部分に印加される照射量を指示することによって実行され、画像は、それに続いて、これらの画素に関連する光出力及び照射量に従って照射対象物部分に対応する画素を集めることによって構成され、各個別の対象物部分の照射量は、少なくとも、他の対象物部分又はいくつかの他の対象物部分の光出力及び/又は照射量に依存する。 (もっと読む)
空間内において少なくとも1つのオブジェクトを最終姿勢に高精度で位置決めするための方法およびシステム
本発明は、空間内において少なくとも1つのオブジェクトを最終位置に高精度で位置決めするための方法およびシステムに関する。オブジェクト(12)を産業用ロボット(11)によって把持公差以内で把持および保持する。前記産業用ロボット(11)の前記把持公差を補償する調整量を求める。前記オブジェクト(12)を高精度で最終姿勢に位置調整するため、該オブジェクト(12)が所定の公差以内で該最終姿勢に達するまで、以下のステップを繰り返し行う:撮像画像を光学的撮像装置(1a,1b)によって撮像するステップ。空間座標系における前記オブジェクト(12)の実際の姿勢を、前記光学的撮像装置(1a,1b)の位置(Pa,Pb)と、角度測定ユニット(4a,4b)によって検出された前記光学的撮像装置(1a,1b)のカメラ(2a,2b)の角度方向と、前記オブジェクト(12)における特徴的要素(13)の知識とから求めるステップ。前記調整量を使用して、前記産業用ロボット(11)の現在のポジショニングと、姿勢差に関連する量とから、該産業用ロボット(11)の新たな目標ポジショニングを決定するステップ。前記産業用ロボット(11)を前記新たな目標ポジショニングに位置調整するステップ。  (もっと読む)
(もっと読む)
形状測定装置
【課題】円盤状の測定対象物の端部の形状をその投影像に基づいて測定する場合に,投光方向と測定対象物とを平行な状態に調節して正しい形状測定を行えること。
【解決手段】測定対象物1の端部に対し平行光を投光する投光部と投光方向R1に対向する方向R2から測定対象物の端部の投影像を撮像するカメラとを光学系保持部材20で保持し,投光方向R1に対する測定対象物の傾き度合いの指標の検出結果に応じて,投光方向R1に直交する支持軸31で軸支された光学系保持部材20を回動駆動させて前記光学系保持部材20の傾きを調節する。
(もっと読む)
基板搬送装置
【課題】センサー劣化やウエハカセットステージ駆動系の性能劣化及び動作不良を検知し、搬送異常が発生する前に復旧作業を可能とする。
【解決手段】カセットステージ3はウエハカセット搬送位置より垂直方向の上方へ駆動し、センサー発光部4及びセンサー受光部5によりウエハカセット2内のウエハ枚数とスロット位置を計測する。このとき、センサー発光部4から投光した光はセンサー受光部5で受光し電気信号へ変換され、センサー強度信号を電圧で出力する。基板搬送制御部8は、センサー受光部5より出力された電圧と、カセットステージ駆動量からウエハカセット2内のウエハ枚数とスロット位置を計測し、その結果をCIM7内のデータと照合する。CIM7はデータ照合の結果、CIMデータと不一致の場合は、CIM7への通信、装置操作パネルでの異常表示などの異常発報を行う。
(もっと読む)
ディスクリファイナの刃面間隙測定装置
【課題】 ディスクリファイナの磨砕刃の刃面間隔を測定するに際して、高精度に、定量的に測定することにより、作業員の熟練に頼らずに確実に測定でき、しかも、簡単な構造としたディスクリファイナの刃面間隙測定装置を提供する。
【解決手段】 主軸3の方向に摺動可能な摺動ディスク6に連繋させて、ターゲット22を設ける。このターゲット22にレーザー光線を入射し、該ターゲット22からの反射光を捕捉する測距センサー23を、ディスクリファイナのケーシング1等の不動の部分に設ける。測距センサー23から照射し、ターゲット22で反射したレーザー光線を該測距センサー23で捕捉することによりターゲット22までの距離を測定して摺動ディスク6までの距離を求め、磨砕刃4a、5a、6aの磨耗量を計測する。
(もっと読む)
粗さ測定方法及び粗さ測定装置
【課題】基板上に形成された透明膜の界面のナノスケールの粗さを光学的に非破壊・非接触で測定すること。
【解決手段】本発明の一態様にかかる粗さ測定装置100は、基板41上に形成された透明膜42の界面の二乗平均平方根粗さを測定するものであり、透明膜42が形成された基板41の透明膜形成面及び参照ミラー19に干渉性を有する第1波長の光を照射する光源11と、透明膜形成面で反射された測定光と、参照面で反射された参照光とを合成した干渉光を受光する光検出器23と、光検出器23で受光された干渉光の強度変化に基づいて、測定光と参照光との位相差から、透明膜形成面の二乗平均平方根粗さを算出し、透明膜42の界面の二乗平均平方根粗さを決定する粗さ算出部33とを備える。
(もっと読む)
光ファイバセンサケーブル
【課題】建築物に埋設して正確に変形を検出でき、耐久性に優れ、コンクリート中でもケーブルが移動せずに長時間の歪モニタリングが可能な光ファイバセンサケーブルの提供。
【解決手段】歪検出用光ファイバと、温度補償用光ファイバがルースに収納された保護管と、抗張力体とをケーブル外被により一括被覆してなり、該ケーブル外被は、前記歪検出用光ファイバと前記保護管とが埋設された測定部と、前記抗張力体が埋設された抗張力体収納部とが、首部を介して連結された断面形状をなし、且つ前記首部には長手方向に沿って多数の窓部が形成されていることを特徴とする光ファイバセンサケーブル。
(もっと読む)
センサ及びビデオ三角測量を共同使用する物体の検出
【課題】標的を検出・追跡する方法及び装置が提供される。
【解決手段】1以上のプラットホームに据え付けられた少なくとも2台のカメラ(10、12、14)によって、視界(16)から画像が捉えられる。これらの画像は分析され、標的位置をフレームからフレームに追跡するのに利用できる画像で標識を確認する。画像は、少なくとも1つのセンサから標的又はプラットホームの位置に関する情報を融合して(1つにまとめて)、標的を検出・追跡する。プラットホームの位置に対する標的位置が表示されるか、あるいは標的に対するプラットホームの位置が表示される。
(もっと読む)
パターンの方向測定装置および方法
【課題】 例えばレジストを感光させることなく、レジストに形成されたL/Sパターンの方向を測定することのできる方向測定装置。
【解決手段】 L/Sパターン(12A〜12D)の方向を測定する方向測定装置は、L/Sパターンに光を照射する照射系(1〜3)と、L/Sパターンで反射された0次回折光を検出する検出系(4,5)と、L/Sパターンの方向に対してL/Sパターンへの光の入射方向を相対的に変化させる方向変更機構(14,15)と、L/Sパターンの方向と入射方向との相対的な変化に応じて検出系で検出される0次回折光の光強度の変化に基づいて、L/Sパターンの方向を測定する測定系(6)とを備えている。
(もっと読む)
光ファイバセンサケーブルとその製造方法
【課題】製造及び配管等への施工が容易であり、高温環境下で配管の変形、減肉等に起因する歪を分布的に安定して検知することが可能な光ファイバセンサケーブルの提供。
【解決手段】長尺のセンサ基材と、該センサ基材の一方の面上に長手方向に沿って固定された少なくとも1本の歪検知用ファイバと、センサ基材の前記一方の面と反対側の面に長手方向に沿って配置された絶縁用フィルムとを有することを特徴とする光ファイバセンサケーブル。
(もっと読む)
雄ねじを光学計測するための方法および装置
【課題】本発明は、特に管端の雄ネジ断面を光学計測するための方法であって、ネジを事前に製造ラインで周期的に製造し、続けて加工する前に、ネジの始端から終端までを直線的に連続計測するものに関する。課題は、周期的ネジ製造時に安価なネジの検査を可能とすることである。
【解決手段】事前に製造されたネジの断面を、(逆光内に配置される照明装置および)カメラを含む(少なくとも1つの)光学計測ユニット(と管との間)における回転および直進から成る相対運動によって、管の横断面に対して接線方向で照明し、または走査され、ネジの断面を走査する時間を所要のカメラ空間分解能を考慮して後続のネジの製造周期時間内とするように、走査速度を調節し、ネジの輪郭の画像をカメラによって検出し、引き続き光学信号を評価するとともに目標設定値と比較する。
(もっと読む)
41 - 60 / 118
[ Back to top ]