
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
2,081 - 2,100 / 4,968
内視鏡装置およびプログラム
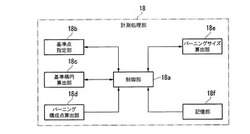
【課題】操作の煩わしさを低減し操作性を向上することができる内視鏡装置およびプログラムを提供する。
【解決手段】基準点指定部18bは、映像信号に基づく画像上の3つの基準点を指定する。バーニング構成点算出部18dは、3つの基準点で決定される基準楕円上に設定した複数点の各々に基づく画像領域内で映像信号を処理し、バーニングを構成するバーニング構成点を算出する。バーニングサイズ算出部18eは、バーニング構成点に基づいてバーニングのサイズを算出する。
(もっと読む)
基板観察装置、基板観察方法、制御装置、およびプログラム

【課題】基板や装置の大型化にともなって、一律な補正により適切な補正を行うことが難しい場合でも、適切な補正を可能とする。
【解決手段】基板観察装置の機能を有する欠陥修正装置100は、基板10上の欠陥の位置を指定する第1の位置情報に基づいて、基板10に対する光学系104の相対的な位置を移動させる。画像処理部109は、相対的に移動された光学系104を介して撮像部106が撮像した撮像画像を取り込み、欠陥の位置を表す第2の位置情報を取得する。座標補正マップ作成部110は、相対移動の量を第1の位置情報に応じて補正するための補正情報を、第2の位置情報に基づいて生成する。座標補正マップ記憶部111は、生成された補正情報を含む座標補正マップを記憶する。座標補正マップでは、補正情報が、予め定義された複数の領域のうちで第1の位置情報に対応する領域に関連付けられている。
(もっと読む)
試料検査装置
【課題】ジョイスティックやトラックボールを使った煩雑な作業を簡易化することが出来、操作性を大幅に向上し得る試料検査装置を提供する。
【解決手段】試料検査装置は、CCDカメラ及び照明装置を備えた顕微鏡1、この顕微鏡1を制御する画像処理装置8、被検査対象3を検査位置に移動する検査ステージ2、この検査ステージ2を駆動・制御するステージ駆動・制御装置4及び検査システム全体を制御するシステム制御装置6で構成される。画像処理装置8は、マウス等の入力装置8a及び処理画像を表示するモニタ9を備え、モニタ画面上に表示された目標画像が入力装置8aにより指定され、且つ目標画像の移動先が画面上で指定された際に、前記指定された2個所の座標の差分を求め、該差分だけ検査ステージ2を移動させて目標画像を指定位置に移動表示する。
(もっと読む)
三次元形状計測方法および三次元形状計測装置
【課題】測定対象物の表面の反射率の大きさや計測環境の照明の明るさ等にかかわらず、光切断線の撮像画像において光切断線を確実に抽出することができ、露出についてロバストな自動制御に対応することができる三次元形状計測方法を提供すること。
【解決手段】光切断法による三次元形状計測方法において、アンダー側の限界の状態およびオーバー側の限界の状態を含む複数の露出状態での二次元画像を取得し、取得された複数の二次元画像それぞれについて、画像データについての輝度値の積算値である輝度体積Vを算出し、算出された輝度体積Vの複数の二次元画像についての平均値を、露出の制御における目標輝度体積Vrefとして設定し、目標輝度体積Vrefに基づく入力信号と、スリット光のワークに対する各走査位置に対応する二次元画像について算出される測定輝度体積Vmeasに基づくフィードバック信号との比較による差に基づいて、露出の制御を行う。
(もっと読む)
オブジェクト管理装置、携帯端末、および、オブジェクト操作方法
【課題】装置を小型化でき、短時間で効率的に作業空間を準備でき、処理内容決定処理の負荷を軽減し、ユーザが所望する処理内容をリアルタイムに決定し実行することができる、オブジェクト管理装置、携帯端末、および、オブジェクト操作方法を提供することを課題とする。
【解決手段】本発明は、画像撮影部116により携帯端末200と操作対象オブジェクトとの位置情報を取得し、取得された位置情報に基づいて、携帯端末200が特定の操作対象オブジェクトの特定領域内にある判定された場合、この操作対象オブジェクト上でユーザが携帯端末200を用いて行った所定の動作を、携帯端末200の変位検出部20にて物理量の変位として検出し、オブジェクト管理装置100へ送信し、受信した物理量の変位に基づいて、携帯端末200の表示部214上に表示された表示オブジェクトを用いて行う処理を規定する処理コマンドをリアルタイムに決定し実行する。
(もっと読む)
測定方法、測定装置及び光学系の製造方法
【課題】被測定体によって形成される光束の波面を高精度(例えば、高空間周波数のうねり成分まで)、且つ、短時間で測定することができる測定方法を提供する。
【解決手段】参照面を有する光学系と、検出面を有する検出部とを備え、前記光学系によって前記検出面に形成される被測定体又は基準面からの被検光束と前記参照面からの参照光束との干渉パターンを前記検出部で検出する測定装置を用いて、前記被測定体によって形成される光束の波面を測定する測定方法であって、前記測定装置における位相伝達関数及びパワースペクトル密度を用いて、前記測定装置による測定結果から前記光学系に起因する波面誤差を分離する測定方法を提供する。
(もっと読む)
複数ディスプレイ設置設定装置、方法、プログラム、及びシステム
【課題】サイズの異なる複数のディスプレイが部屋の中に自由に配置された場合には、各ディスプレイの相対位置の情報を設定するのが困難だった。
【解決手段】メインディスプレイ210からの指示により、設置設定装置230は予め1つ以上備える一意な測定用画像を、検出可能な各ディスプレイ210及び220に表示させ、各ディスプレイからディスプレイサイズの情報を取得する。ユーザはその様子をデジタルカメラを用いて撮影した画像を設置設定装置230に与える。設置設定装置230は画像から測定用図形を抽出し、各測定用画像の3次元位置を推定する。設置設定装置230は、各測定用画像の3次元位置からメインディスプレイ210を基準とする相対位置および相対角度と、各ディスプレイのディスプレイサイズからメインディスプレイ210を基準とする相対サイズとを算出し、各ディスプレイの相対位置の情報としてメインディスプレイ210に送付する。
(もっと読む)
反射曲面形状検査方法
【課題】所定の光学系の光路上に配設される被検反射曲面の形状が適格か否かを、簡易かつ短時間で判定することが可能な反射曲面形状検査方法を得る。
【解決手段】検査用投影光学系40内に非球面ミラー50を配設し、透過型液晶パネル30に検査用原画像を表示する。検査用スクリーン60上に検査用原画像の相似拡大像を投影し、撮像カメラ71によりその画像データを取得する。取得された画像データをフーリエ変換し、空間周波数領域におけるスペクトル関数のグラフを求める。このスペクトル関数のグラフにおいて、検査用原画像が有する所定の空間周波数に対応したピーク部を特定し、そのピーク部の高さおよび半値幅に基づき、非球面ミラー50の形状が適格か否かを判定する。
(もっと読む)
トロリ線摩耗量測定方法および測定システム
【課題】
手作業によることなく、高い精度でかつ摩耗量算出のデータ処理ロードを軽減して測定することが可能なトロリ線摩耗量測定方法および測定システムを提供することにある。
【解決手段】
この発明は、受光信号に基づいて得られる信号波形に対応する1ラインの摺動面データにおいてトロリ線摺動面の外側の背景レベルの平均値を算出し、この平均値を目安としてこれより上でかつ受光信号の最低レベルより低い第1の基準レベルを得て、この第1の基準レベルで1画面分のデータを二値化してノイズに対応する画面上の孤立点の座標を抽出する。そして1画面分のデータから孤立点を除去することで孤立点ノイズが除去された各1ラインの摺動面データを得る。そして、この1ラインの摺動面データに対して2つのパラメータに対応する摺動面の幅を容易に算出することができる。
(もっと読む)
光学素子及びその製造方法、ニッポウディスク、コンフォーカル光学系、並びに3次元測定装置
【課題】少なくとも一部において、遮光性を得ながら反射ノイズ低減効果を高めることができる光学素子を提供する。
【解決手段】光学素子は、多数の微小突起CP1を含む第1の微細凹凸構造MR1が一方の面に形成された基板11と、第1の微細凹凸構造MR1を覆う金属層12と、金属層12の基板11とは反対側に形成されたシリコン又は樹脂からなる膜13であって、多数の微小突起CP2を含む第2の微細凹凸構造MR2を持つ膜13と、を備える。
(もっと読む)
画像認識装置及び画像認識方法
【課題】個々間で厚さにばらつきのある薄膜部材のパターンマッチングを安定して行うことができる画像認識装置及び画像認識方法を提供することを目的とする。
【解決手段】光源部8は波長の異なる照明光Lを選択的に切り換えて出射し、照明光学系9は光源部8から出射された照明光Lを認識マークM(薄膜部材)に導いてこれを照明する。制御部10は、光源部8から出射される照明光Lの波長を切り換えて異なる波長の照明光Lで認識マークMを照明しながらカメラ7eで認識マークMの撮像を行うとともに、認識マークMの撮像に用いている照明光Lの波長に応じた認識マークMのテンプレート画像を記憶部11から読み出し、撮像によって得られた認識マークMの画像と記憶部11から読み出したテンプレート画像とを比較してパターンマッチングを行う。
(もっと読む)
ポケット形状検査装置
【課題】PTPシートの製造過程において発生するポケット部の変形等に起因する種々の不具合を払拭することのできるポケット形状検査装置を提供する。
【解決手段】最上流側に帯状のアルミニウム製の包装用フィルム3がロール状に巻回され、その下流側に包装用フィルム3にポケット部2を形成するためのポケット部形成手段14が設けられ、そこで包装用フィルム3が加熱軟化された上でポケット部2が成形される。その後、包装用フィルム3は各ポケット部2に錠剤5を充填する錠剤充填手段16、包装用フィルム3にカバーフィルム4を取着するためのシール手段、PTPシート形状に打抜くためのシート打抜手段24等を経てPTPシート1へと加工される。かかるPTPシート1の製造過程において、PTPシート1のポケット部2の形状が三次元計測される。そして、その計測結果に基づき、ポケット部2の形状について良・不良が判定される。
(もっと読む)
画像データ処理
試料の画像データを処理する方法が開示されている。当該方法は、前記試料の少なくとも一部が重なっている複数の空間領域の第1画像と第2画像とのレジストレーションを行う手順、及び、前記のレジストレーションされた画像からのデータを処理することで、前記第1画像と第2画像から得られる画像に加えられる前記試料についての情報を有する合成画像データを取得する手順を有する。 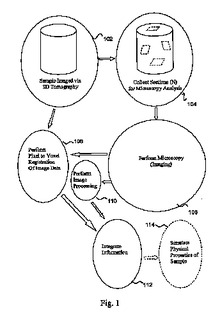 (もっと読む)
(もっと読む)
ネジの検査装置
【課題】ネジの首部のネジ山を正確に検査しながら、回転円筒のネジの吊り下げ片を十分な強度として、変形などの弊害を確実に防止する。
【解決手段】ネジの検査装置は、ネジ1の雄ネジ部1Bを案内してネジ頭1Aを上面に引っかけて移送するスリット3を所定の間隔で設けている回転円筒2と、回転円筒2を回転させる回転機構10と、回転円筒2のスリット3にネジ1を供給する供給機構4と、回転円筒2で移送されるネジ1を検査する検査機構6とを備える。検査機構6は、光源7とカメラ8と演算検査器9とを備える。検査装置は、光源7の光をスリット3に透過させてカメラ8で受光し、カメラ8から出力される映像信号を演算検査器9で演算処理してネジ1を検査する。回転円筒2は、スリット上端の両側に一対の吊り下げ片20を一体構造に設けている。一対の吊り下げ片20は、その内面を、上端に向かってスリット幅を狭くするように傾斜または湾曲している。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】高精度且つ安定な移動テーブルの位置計測を実現する。
【解決手段】 液浸露光方式の露光装置において、投影光学系PLとの間に供給される液体によってウエハW上面に液浸領域ALqが形成され、そのウエハWを保持する移動テーブル上に、複数のエンコーダヘッド60A〜60Dが配置されている。制御装置は、複数のエンコーダヘッドのうち、液浸領域外にあるエンコーダヘッド60A,60B,60Dを用いて、XY平面内における移動テーブルの位置情報を計測する。これにより、高精度且つ安定な移動テーブルの位置情報の計測が可能となる。
(もっと読む)
画像処理システム
【課題】物体表面の形状を特定することができる画像処理システムを提供すること。
【解決手段】画像処理システムであって、照射光を物体に照射する光照射部と、照射光が照射された物体の表面の画像である表面画像を取得する画像取得部と、照射光の照射方向を算出する照射方向算出部と、表面画像の画像内容、および照射方向算出部が算出した照射光の照射方向に基づいて、照射光が照射された物体の表面の形状を算出する形状算出部とを備える。
(もっと読む)
ステータコイルの形状検査方法および形状検査装置
【課題】光の多重反射等により生じるノイズ等に起因する検査精度の低下を招くことなく、光切断法による計測を用いることができ、コイルエンドの形状について、ケースに対する絶縁不良につながる形状不良の有無を、非破壊(非接触)・自動・高速で精度良く検査することが可能となるステータコイルの形状検査方法を提供すること。
【解決手段】スリット光11を照射することで得られる反射光の二次元画像13を取得する光切断法を用い、ステータコイル10のコイルエンド10bの部分の形状の良否判定を行う形状検査方法であって、二次元画像13の取得に適した表面処理が施され、コイルエンド10bの部分の外形形状について良品として許容される最大外形形状を有する部分を備える基準ワークを用い、基準ワークについての計測点群に基づき基準データを作成し、ステータコイル10についての計測点を、基準データと比較することにより、前記良否判定を行う。
(もっと読む)
移動装置および、その位置認識方法
【課題】従来技術では、カメラと投光する平面との相対位置関係から傾きや距離を算出しているため、平面とカメラの絶対位置が変化すると平面の絶対的な傾きを算出することができない課題がある。
【解決手段】本発明は、移動装置が活動する領域の天井に設けられた認識用マークをカメラで撮像した画像から認識し、前記領域内の前期移動装置の位置を認識する自己位置認識方法において、前記移動装置が、重力方向に垂直な面を保つ屈折板を透過した天井に投光したパターンの形状と位置をカメラの撮像した画像から認識し、重力方向に対する移動装置の傾斜角を判断することにより、移動装置とマークの正確な相対位置認識を行うことを特徴とする移動装置の自己位置認識方法、および、自己位置認識移動装置を提供することを目的とする。
(もっと読む)
RGB及び奥行き計測ハイブリッドカメラセンサを使用する長方形テーブル検知
【課題】平面の位置をより確実にかつより正確に決定する。
【解決手段】テーブルのような平面を有する対象物が、奥行き画像及びカラー画像を処理することによって検知される。平面を有する対象物を含む可能性を有する領域を示すマスクが、奥行き情報を含む奥行き画像を処理することによって生成される。奥行き画像に対応するカラー画像がマスクを使用してトリミングされ、平面を有する対象物を含む可能性を有する、カラー画像の部分を検知する。トリミングされたカラー画像の、線のような幾何学的特徴が検知され、平面を有する対象物の位置及び向きを決定する。検知された幾何学的特徴のサブセットが、平面の輪郭として選択される。
(もっと読む)
光学式測定装置及び位置合わせシステム
【課題】 複数の部材の相対的位置を、簡単な構成で光学的に測定できるようにすること。
【解決手段】 光源103及びコーンミラー104を有する光出力部101からは複数の方向に面状の測定用光130、131が出力される。第1光偏向部107は光出力部101からの測定用光130を第1の方向に偏向し第1測定用光として対象物112及び対象物112の穴113に挿入された対象物114に向けて出力する。第2光偏向部109は光出力部101からの測定用光131を第2の方向に偏向し第2測定用光として対象物112、114に向けて出力する。光検出部115は対象物112、114によって反射した第1、第2測定用光130、131を検出し、演算制御部116は光検出部115によって検出した測定用光に基づいて三角測量法によって対象物112、114間の間隙を算出する。
(もっと読む)
2,081 - 2,100 / 4,968
[ Back to top ]