
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
2,041 - 2,060 / 4,968
画像計測装置、画像計測方法及びコンピュータプログラム
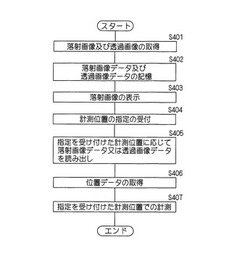
【課題】操作者が熟練を要することなく最適な照明方式を選択することができ、高い精度で所望の形状を計測することができる画像計測装置、画像計測方法及びコンピュータプログラムを提供する。
【解決手段】落射照明手段を用いて撮像手段で計測対象物を撮像した第一の画像データと、透過照明手段を用いて撮像手段で計測対象物を略同じ位置にて撮像した第二の画像データとを記憶しておく。第一の画像データを表示し、表示された第一の画像データ上で計測位置の指定を受け付ける。指定を受け付けた計測位置に応じて第一の画像データ又は第二の画像データを記憶手段から読み出し、読み出した第一の画像データ又は第二の画像データに基づいて位置データを取得する。取得した位置データに基づいて、指定を受け付けた計測位置での計測を実行する。
(もっと読む)
ピックアップ手段選択装置及びピックアップ手段選択方法並びに部品高さ計測装置

【課題】部品実装機に供給される部品をピックアップするピックアップ手段(吸着ノズルやチャック等)を、予め準備(登録)されている複数種類のピックアップ手段の中から選択する際に、上面に凹凸がある部品についても、当該部品をピックアップ可能なピックアップ手段を正しく選択できるようにする。
【解決手段】ピックアップ対象となる部品の上面側から見た3次元画像を3次元画像取得手段により取得し、取得した部品の3次元画像に基づいて部品上面のうちノズル吸着面として使用可能な平坦面部のサイズを計測し、計測した平坦面部のサイズに基づいて複数種類のピックアップ手段の中から、部品のピックアップに使用するピックアップ手段を選択する。
(もっと読む)
管体の検査装置及び検査システム
【課題】透明な小径管体の外観欠陥検査を、管肉厚部分の影響を受けずに高精度で行える管体の検査装置及び検査システムを提供する。
【解決手段】光軸方向に順に光源19、管軸方向スリット34を複数有するスリット板21、光軸直交方向に移送されるガラス管15、撮像装置20を配置し、スリット板21を背景にガラス管15を撮影し画像処理装置24で画像処理して、ガラス管15の外観欠陥を検出する装置で、スリット板21は、ガラス管15を通して見た時、スリット34がガラス管15の内径寸法より狭い範囲内の画像となるように、またスリット外方遮光部分35bが管肉厚部を遮光する画像となるように形成され、撮像装置20は、スリット画像と共にガラス管15の外形画像等を同時に撮影し、画像処理装置24は、スリット画像と外形画像等に基づいてガラス管15の外観欠陥の検出を行う。
(もっと読む)
表面性状測定装置
【課題】反射像を撮影して表面性状を測定する表面性状測定装置の光源部の入射角およびデジタルカメラ等の固定撮像素子の受光角を多様に変更でき、且つその調整を無段階に簡単に行える表面性状測定装置を提供する。
【解決手段】ベース1に半円状の摺動ガイド13を固定し、摺動ガイド13上に摺動子33,43を摺動自在に取り付けて、その一方にデジタルカメラ31を固定し、他方に光源部41を固定する。そして、それら摺動子33,43にそれぞれ円弧ラック51,61を固定し、調節ツマミ81の操作により歯車52,62および円弧ラック51,61を介して摺動子33,43を移動させ、光源部41とデジタルカメラ31を互いに反対方向に同じ角度だけ回転させることができるようにする。
(もっと読む)
三次元形状推定装置及びコンピュータプログラム
【課題】全ての画像に被写体の全ての特徴点が見えていない場合であっても、被写体の三次元モデルを頑健かつ精確に、また、簡易な計算処理により推定する。
【解決手段】三次元形状推定装置1は、複数の画像各々における被写体の顔上の特徴点の二次元座標値の情報を受けるとともに、ジェネリックな顔モデルの三次元座標値により三次元形状モデルの推定値を初期化する。そして、複数の各画像における各特徴点の二次元座標値と、直前に算出された三次元形状モデルの推定値とから、各画像における被写体の顔の向きの推定値を算出し、複数の各画像における各特徴点の二次元座標値と、直前に算出された各画像における被写体の向きの推定値とから、三次元形状モデルの推定値を算出する、ことを繰り返して被写体の顔の三次元形状を推定する。
(もっと読む)
ディンプル位置検出装置とディンプル位置検出方法
【課題】ディンプル頂点の位置を正確に検出することができるディンプル位置検出装置を提供する。
【解決手段】ロードビームに形成されたディンプルの位置を検出するためのディンプル位置検出装置であって、ディンプルに向けて光を照射する照明装置と、その反射光を受光する撮像装置と、得られた画像を二値化する画像処理部とを備えている。画像処理部は、二値化レベルを最大にする手段S2と、反射光の画像を二値化する手段S3と、二値化レベルを超えた光点領域(オン領域)の面積が所定値であるか否かを判定する手段S4と、光点領域の面積が所定値未満のときに二値化レベルを下げる手段S6と、光点領域の面積が所定値に達したときに光点領域の重心の位置を算出する手段S8とを具備している。
(もっと読む)
形状検査装置および形状検査プログラム
【課題】繰り返しパターンを表す画像のパターン間にノイズが存在する場合でも、正確な欠陥検査を行う形状検査手法を提供する。
【解決手段】形状検査は、被検査パターンの輪郭を推定し、被検査パターンが正しい形状にどの程度近いかを算出する処理である。被検査領域中を各々の被検査パターンを含む個別領域に分割し、第1の形状検査を行う。次に、第1の形状検査が不合格であった個別領域に対して、より限定した領域のみを対象として第2の形状検査を行い、推定輪郭を修正する。領域の限定には、個別領域の周囲に位置する、第1の形状検査に合格した被検査パターンの輪郭を用いる。第2の形状検査では、まず正しい形状を備えた周囲の被検査パターンに基づいて、検査対象の個別領域に含まれる被検査パターンが正しい形状を備えている場合の輪郭を推定する。そして、推定された輪郭を含み、かつ個別領域全体より小さな領域を検査範囲として形状検査を行う。
(もっと読む)
画像処理によるラインセンサ焦点距離測定装置
【課題】ラインセンサの焦点距離を簡易に且つ高精度に測定する。
【解決手段】ラインセンサの焦点距離測定装置を、表面に相互に平行する二本の直線状の境界線11を挟んで黒色部分12と白色部分13とが交互に配色された平板からなるターゲット1と、ターゲット1との距離Lが既知であって、走査線方向がターゲット1の表面及び境界線11に直交するように設置されて境界線11を撮像するラインセンサ2と、ラインセンサ2によって撮像した画像を処理して境界線11間の幅を求め、得られた境界線11間の幅に基づいてラインセンサ2の焦点距離fを算出する画像処理部3とから構成した。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】高密度な復元が可能であり、画像処理に対しても頑健な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】本発明の画像処理装置10は、投影手段としてのプロジェクタ12と、撮影手段としてのカメラ14と、例えばパーソナルコンピュータから構成される画像処理手段16とから主要に構成されている。そして、画像処理手段16では、撮影された画像からパターン同士の交点を獲得し、この交点を含む第1暫定平面および第2暫定平面の制約条件と、プロジェクタ12とカメラ14との位置関係から得られる制約条件を用いて自由度を含む第1解を算出している。1次的な探索によりこの自由度を解消することで、3次元形状を復元している。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】計測対象物の外形等の角部に設けられた円弧を容易にかつ精度良く計測することができる画像計測装置、画像計測方法及びコンピュータプログラムを提供する。
【解決手段】撮像素子にて得られた画像を表示する表示手段332、画像上の計測対象物の所定のエッジ部分を含むエッジ検出領域の指定を受け付ける指定受付手段333と、エッジ検出領域内のエッジ点の座標値を取得する座標値取得手段334、円弧を挟んで円弧に連続する2本の直線状部分上のエッジ点の座標値に基づいて2本の直線部分を特定する直線部分特定手段51、2本の直線部分の延長線が交差して円弧を挟む角を二等分する中線を特定する中線特定手段52及び中線が円弧と交わる交点を特定する交点特定手段53を含んで交点等に基づいて円弧を特定する円弧特定手段335、特定した円弧の形状を受光レンズの倍率で換算する形状倍率換算手段336を備える。
(もっと読む)
位置合わせを行う装置、方法、およびプログラム、ならびに基準モデルを作成する装置、方法、およびプログラム
【課題】モデルを利用した位置合わせにおいて、人間の関与を極力減らし、画像認識に資する部分を効率的にモデル化するための技術を提供する。
【解決手段】位置合わせを行う対象物と同じ種類の基準物に含まれる基準パターンである回路パターン2を撮像した撮像画像1から、特徴点抽出処理により特徴点3a〜3dなどの複数の特徴点が抽出される。そして、抽出された複数の特徴点それぞれの座標を含むモデル特徴箇所座標群5を含む基準モデルが記憶される。基準モデルは、各特徴点の周辺から切り出した画像を含むモデル特徴箇所画像群4をさらに含んでもよい。対象物を撮像して取得した対象撮像画像から抽出された複数の特徴点それぞれの座標と、基準モデル内のモデル特徴箇所画像群4とを利用して、基準パターンと対象パターンのずれを表すずれ量を算出して対象物に関する位置合わせ処理を行うことが可能である。
(もっと読む)
パターン欠陥検査装置及び検査方法
【課題】画素分解能を高め、また、放射線によるノイズを排除することで、欠陥検出能力の高いパターン欠陥検査装置及び検査方法を提供する。
【解決手段】第1の方向に沿って第1の画素ピッチで配列した複数の第1の画素を有し、被検査体の光学像の第1の画像データを出力する第1のセンサと、第1の方向と略直交する第2の方向に並列して設けられ、第1の方向に沿って第1の画素ピッチで配列し且つ第1の方向において第1の画素位置から第1の画素ピッチの1/N(Nは1以上の整数)だけずれた位置に配置された複数の第2の画素を有し、被検査体の光学像の第2の画像データを出力する第2のセンサと、第1の画像データ及び第2の画像データに基づいて被検査体の欠陥を検出する欠陥検出部と、を備えたことを特徴とするパターン欠陥検査装置が提供される。
(もっと読む)
試料片の厚さ及び屈折率の計測方法及び装置
【課題】この発明は、試料片の厚さを屈折率分布の計測と同時に、かつ高精度で行うことを可能とし、もって屈折率分布を高精度で計測することを可能とすることを課題とするものである。
【解決手段】屈折率が既知でかつその値が異なる2種以上の透明な板状体1,2と、屈折率が未知の被計測部分が包埋された被計測試料5とをその薄片化方向に沿った面を当接させて積層し、次いで前記積層された板状体と試料体とに薄片化加工を施して被計測薄片9を形成する。
干渉計測を行うために、一旦可干渉光を二分し、一方には被測定部分の情報、他方には基準となる位相の情報を持たせた後、その両者を重畳させる。こうして得られた干渉画像から、一の板状体と他の板状体のそれぞれの領域を透過した可干渉光の間の位相差を計測し、この位相差と前記透明板状体の既知の屈折率から前記被計測薄片の厚さを計測する。
(もっと読む)
電線観測システム
【課題】自然環境の変化があったとしても、電線上に取り付けられた標的を確実に認識して、電線の挙動を測定することが可能で、昼夜・天候・季節を問わず、無人で長期間連続して計測することができる電線観測システムを提供する。
【解決手段】支持物間に張架される電線に標的を取り付けて、標的の動きを通して電線の動きを観測する電線観測システムであって、標的は自らが発光する手段を有して、電線に取り付けられた標的支持部材上に、複数個数が所定の間隔をもって配設され、標的支持部材は、電線クランプ部と標的取り付け部とを備えて構成される電線観測システムとした。
(もっと読む)
摩耗測定装置及び摩耗測定方法
【課題】画像処理によりトロリ線の摩耗を測定するための摩耗測定装置及び摩耗測定方法を提供する。
【解決手段】トロリ線42を撮像するラインセンサ10からの輝度信号を基にラインセンサ画像を作成する手段と、前記ラインセンサ画像の各画素について輝度値が所定の閾値未満の画素を黒部31とし所定の閾値以上の画素を白部30とする二値化処理を施して二値化ラインセンサ画像を作成する手段と、点在する縞状白部32を連結して補間後二値化ラインセンサ画像を作成する手段と、前記補間後二値化ラインセンサ画像に対してノイズ除去処理を施しノイズ除去後二値化ラインセンサ画像を作成する手段と、前記ノイズ除去後二値化ラインセンサ画像において前記トロリ線42の線摩耗部のエッジ検出を行いエッジデータ34を作成する手段と、前記エッジデータ34を用いトロリ線摩耗部幅の計算を行う手段とを備えた。
(もっと読む)
閾値レベル自動演算装置と方法、位置決めマーク認識装置と方法および電子部品の製造方法
【課題】マークの形状が変化した場合や、照明が変化した場合、あるいはマークが付されている対象が変化した場合であっても、マークを正確に読み込むことができる閾値レベルを自動的に検出することができる閾値レベル自動演算装置と方法、位置決めマーク認識装置と方法および電子部品の製造方法を提供すること。
【解決手段】位置決めマーク18を撮像する撮像カメラ6と、撮像カメラ6で撮像された位置決めマーク18を含む多値画像を、初期の閾値レベルで二値化する二値化手段8と、二値化手段8で二値化された二値化画像のうち、位置決めマーク18に対応すると考えられる二値化画像塊の面積(S)と周囲長(R)とを求め、前記面積(S)を前記周囲長(R)で割り算した比率(S/R)を求める演算回路10と、二値化手段8における閾値レベルを変化させて、演算回路で比率(S/R)を求める工程を繰り返し、比率(S/R)が所定値以上となる閾値レベルの範囲を求め、当該閾値レベルの範囲Wから実閾値レベルW0を決定する制御部12と、を有する。
(もっと読む)
顕微鏡用撮像装置と、対物ミクロメータ
【課題】キャリブレーション操作の煩わしさを軽減可能な、顕微鏡用撮像装置と対物ミクロメータを提供すること。
【解決手段】観察手段により観察される標本像を撮像し、観察画像を出力する撮像手段21と、前記撮像手段の撮像範囲内に含まれる1つまたは複数の寸法校正用パターンと当該1つまたは複数の寸法校正用パターンの近傍にそれぞれ配置された寸法情報パターンの中から、前記撮像範囲内の最外周部近傍に位置する前記寸法校正用パターンを少なくとも1つ選択し、選択した前記寸法校正用パターンに対応する前記寸法情報パターンから当該寸法校正用パターンの寸法情報を取得する寸法情報取得手段23と、取得した前記寸法情報と選択した前記寸法情報パターンに対応する前記寸法校正用パターン画像の画素数とから1画素当たりの実寸法を算出する寸法校正手段23と、を有することを特徴とする顕微鏡用撮像装置2。
(もっと読む)
光学式測定装置
【課題】軟質の被測定物に対してダメージを与えることを防止でき、かつセンサの検出能力の安定化を図ることができるとともに、作動距離の長い対物レンズを使用できる光学式測定装置を提供すること。
【解決手段】光学式測定装置1は、対物レンズ61を、被測定物が載置されたテーブル40に対して移動させて被測定物の画像を撮像し、被測定物の撮像画像から被測定物の寸法等を測定する。この光学式測定装置1は、対物レンズ61の周囲に設けられて対物レンズ61への物体の接近を検出する反射型光電センサ62と、反射型光電センサ62によって物体への接近を検出した場合に、対物レンズ61の物体への衝突を回避する衝突回避手段3とを備えている。
(もっと読む)
3次元計測システム、計測端末、3次元形状の計測方法、およびトータルステーション
【課題】3次元形状を精度よく計測する。
【解決手段】3次元計測システムによる計測方法は、屋外で、計測端末を用いてGPS信号を受信して、内部時計の時刻をGPSの時刻に同期させるステップ(S810)と、トータルステーションが接続されているコンピュータに計測端末を接続して、コンピュータの内部時計の時刻を計測端末の時刻に同期させるステップ(S830)と、3次元計測の対象となるエリアに複数の基準点マーカを設定するステップ(S840)と、トータルステーションに計測端末を取り付けて、計測端末の内部のモーションセンサのヨー角(0度)と、トータルステーション220のヨー角(0度)とを一致させるステップ(S850)と、計測端末のレーザスキャナのレーザ計測方向の基準軸をモーションセンサのヨーイング方向の基準軸に合わせるステップ(S860)とを含む。
(もっと読む)
糊状物体検査装置
【課題】検査に用いられる光以外の光が存在すると、紙に糊が付着しているか否かを検査することができない。
【解決手段】糊状物体検査装置6は、平面上の糊状物体を検査する装置であって、被検査物に対して光を照射する光照射部62と、光照射部62により光が照射された被検査物を撮影する撮影手段64と、撮影手段64により撮影された画像おいて、被検査物の特定の検査領域内に映ったスリット線が直線状から変化しているかにより、被検査物上の糊状物体を検出する糊状物体検出手段65とを備え、光照射部62は、平行に並んだ複数本の直線状のスリット線が形成された透過体と、被検査物に対し、透過体を透して光を照射する照明手段とを有する。
(もっと読む)
2,041 - 2,060 / 4,968
[ Back to top ]