
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
2,001 - 2,020 / 4,968
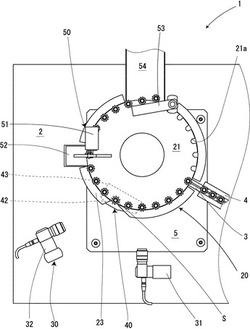
レーザ加工システムの安全区画を規定する方法
【課題】 機械加工デバイスにおいて安全区画又は制限区画を確立する方法を提供する。
【解決手段】 レーザ加工デバイスで利用される切削経路の安全区画を規定する方法。この方法は、計算機支援設計モデルにおける安全区画の位置座標を識別し、マシンビジョンシステムを使ってモデル化された物理的な加工デバイスを撮像し、設計モデルの安全区画の点と撮像された点の間の位置的な差を決定し、機械切削経路プログラムに入力させるために、設計モデルの安全区画の座標系を特定装置向け座標系に変換することを備える。 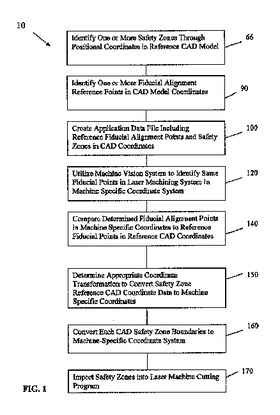 (もっと読む)
(もっと読む)
部品検査装置および部品検査方法
【課題】頭部あるいは鍔部を有する被検査部品を自転させて、その外周を走査して検査する際、騒音および当該被検査部品の損傷を防止する部品検査装置を提供する。
【解決手段】被検査部品Sを搬送手段21から浮かせた状態で自転させて、当該被検査部品の外周を検査ユニット30で走査する。そのため、被検査部品が自転する際、当該被検査部品と搬送手段とが擦れないので、騒音および当該被検査部品の損傷が低減されるとともに、検査ユニット30による走査時に被検査部品が振動しないので、より正確な走査結果を得ることができる。
(もっと読む)
電子部品実装方法および装置

【課題】 ロータリヘッドを備えた部品移載装置を移動台に交換可能に固定した電子部品実装装置において、交換した部品移載装置のロータリヘッドの各スピンドルの回転中心位置の各補正値を容易且つ正確に求める。
【解決手段】ロータリヘッドの複数のスピンドルの中、実装ポイントに割出されたスピンドルの回転中心が、校正された部品認識用カメラの光軸の座標位置に位置するように移動台を移動する。各スピンドルを第1回転角度位置および第1回転角度位置と異なる第2回転角度位置にそれぞれ位置決めした状態で各スピンドルに装着された吸着ノズルの先端を部品認識用カメラで撮像する。実装ポイントに割出された第1および第2回転角度位置での各吸着ノズルの先端画像の中心位置に基づいて各スピンドルの回転中心位置の各補正値を効率的に正確に求めることができる。
(もっと読む)
干渉測定方法および干渉計
【課題】平行平面板の被測定面に対して高精度な測定を行うことが可能な干渉測定方法を提供する。
【解決手段】所定の参照面6aおよび平行平面板5の被測定面5aに、互いに干渉しない異なる波長を有する2種類の可干渉光を照射する第1のステップと、2種類の可干渉光が照射された参照面6aおよび被測定面5aからの反射光に基づいて形成される干渉縞を検出する第2のステップと、検出した干渉縞の光強度分布に基づいて被測定面5aの高さを測定する第3のステップとを有し、平行平面板5における被測定面5aと反対側の面5bからの反射光の影響を排除するように2種類の可干渉光における波長の関係および、参照面6aと被測定面5aとの間の光学距離を調整するようになっている。
(もっと読む)
光学式測定装置および投影板に形成されたパターン
【課題】フォーカスの精度を良好に維持できる光学式測定装置を提供すること。
【解決手段】投影板にはサイズの異なる複数のパターンP1〜P3が形成され、小さなサイズのパターンP1〜P3ほど投影板を透過する光束の中心軸L近くに配置されている。そのため、低倍率の時には、光束の中心軸Lから離れた位置にある大きなサイズのパターンP3が用いられ、高倍率の時には、光束の中心軸Lに近接配置される小さなサイズのパターンP1が用いられることとなるので、ズーミングに伴うパターンP1〜P3のサイズの変化を抑制でき、フォーカスの精度を良好に維持できる。
(もっと読む)
サーマルチャンバ
【課題】近年の基板サイズの大型化傾向に従って、基板を戴置するためのステージも大きくなってきている。このため、測定装置そのものが大きくなってきているこの大きくなった装置を収容するべく、サーマルチャンバは、送風ブース内のスペースの内容積が大きくなり、従って温同調節に必要な雰囲気容量が多くなるため、そのスペース内の温度性能を保つため、温調ユニットを大くしなければならないという問題があった。
【解決手段】測定装置のステージ部架台より出された支持金具によって、サーマルチャンバの送風ブースを支持し、石定盤より上方のステージ部分のみ、一定温度に保つ構造とし、更に好ましくは、温調ユニットと送風ブースとを分離することにより、温調ユニットの機械振動を送風ブースに伝えない機能を備えたサーマルチャンバとした。
(もっと読む)
寸法測定方法及び寸法測定装置
【課題】 測定対象物及び該測定対象物の面上に配置された基準長を示す基準尺を含む1つの画像から前記測定対象物の各辺の寸法を測定する寸法測定装置を提供する。
【解決手段】 直方体形状の測定対象物1及び該測定対象物1の面上に予め配置された基準長を示す基準尺2を含む画像を撮像する撮像手段20と、該撮像手段20により撮像された前記画像から前記測定対象物1の頂点及び前記基準尺2を抽出する画像処理手段と、抽出された前記頂点の前記画像平面上における2次元座標から前記測定対象物1の3次元空間における位置・姿勢及び寸法のパラメータを求め、前記基準尺2を用いて、実空間における距離と前記3次元空間における距離との比率である空間のスケールを求め、該空間のスケール及び前記パラメータに基づいて、前記測定対象物1の各辺の寸法を算出する寸法算出手段と、を備える寸法測定装置100。
(もっと読む)
外観画像検査システム及び外観画像検査装置
【課題】連続撮影の際の照明条件の切り替えを好適に行うこと。
【解決手段】外観画像検査システム1は、カメラ2と照明5,6とを備え、照明5,6の照明条件を切り替えつつカメラ2による連続撮影を行う外観画像検査システム1であって、カメラ2の露光終了タイミングに応じて、照明条件の切り替えを開始する。これにより、露光終了タイミングに応じて照明条件を切り替えることができるので、好適な照明条件の切り替えのために利用可能な期間をフル活用することができる。したがって、連続撮影の際の照明条件の切り替えを好適に行える。
(もっと読む)
溶接穴位置の検出方法
【課題】設置費を抑えかつ簡単な検出ロジックでエッジ穴とセンター穴の判定を確実に行うことができる、溶接穴位置の検出方法を提供することを課題とする。
【解決手段】帯状材の溶接点部に穿孔された溶接穴の位置を検出する溶接穴位置の検出方法であって、溶接穴の位置を光学的に検出可能な検出器を、該検出器の検出視野が帯状材の幅方向中央部で所定量ラップするように帯状材の幅方向に並べて2台配置し、前記2台の検出器による溶接穴位置の検出結果に基づいて、溶接穴の帯状材の幅方向位置を特定する。
(もっと読む)
車両挙動検出装置
【課題】簡易な手法により自車両の挙動を検出できる車両挙動検出装置を提供することを課題とする。
【解決手段】自車両の挙動を検出する車両挙動検出装置であって、自車両周辺を撮像する撮像手段と、撮像手段でそれぞれ撮像した撮像時刻の異なる複数の画像間において、移動物体の占める割合が他の領域に比べて小さい比較領域における画素情報を比較する比較手段(S3)と、その比較結果に基づいて自車両の挙動の変化を検出する検出手段(S3)とを備えることを特徴とし、比較手段は、撮像手段でそれぞれ撮像した撮像時刻の異なる複数の画像間において、比較領域における車両上下方向の輝度波形を比較し、検出手段は、比較手段での比較結果に基づいて自車両のピッチングを検出すると好適である。
(もっと読む)
形状測定装置
【課題】被測定物の連続的かつ機械的な駆動なしに焦点面の異なる画像情報を短時間で得られる形状測定装置を提供する。
【解決手段】光量センサー2はセンサー素子2a〜2dを1次元方向に備える。センサー素子2a〜2dは光学系(図示せず)によって、被測定物1の計測線12近傍の高さHa,Hb,Hc,Hdに焦点Va,Vb,Vc,Vdを結ぶ。被測定物1の表面13は黒白に塗り分けられ、センサー素子2a〜2dと光学系を被測定物1の領域Y1から領域Y8方向に移動走査する。時刻で各センサー素子の光量値を読み出し、その値を位置とともに記録する。各センサー素子の光量値は、被測定物1の表面13に合焦ならば表面色の黒13bまたは白13wに対応し、合焦でなければ黒と白が混ざった灰色の値を持つ。この黒,白,灰色の光量値に基づき高さHa〜Hdについて合焦評価を行うことで、各領域Yについての高さを同定できる。
(もっと読む)
面位置検出装置、露光装置、およびデバイス製造方法
【課題】 光学部材の変動に影響されずに被検面の面位置を高精度に検出する。
【解決手段】 第1パターンからの第1測定光および第2パターンからの第2測定光を被検面(Wa)へ導いて第1パターンの中間像および第2パターンの中間像を投射する送光光学系(4〜9)と、被検面によって反射された第1測定光および第2測定光を第1観測面(23a)および第2観測面(23a)へ導いて第1パターンの観測像および第2パターンの観測像を形成する受光光学系(29〜24)と、第1パターンの観測像および第2パターンの観測像の各位置情報を検出し、各位置情報に基づいて被検面の面位置を算出する検出部(23〜21,PR)とを備えている。送光光学系は、第1測定光の被検面への入射面に沿った第1パターンの中間像の投射倍率と、第2測定光の被検面への入射面に沿った第2パターンの中間像の投射倍率とを異ならせる。
(もっと読む)
検査システム及び方法
【解決手段】部品の物理的特徴を計測するシステムと方法であって、システムは光源、検知装置、反射装置、及び保持マウントを有している。方法は、部品が保持マウント内に配置されるように部品をシステムに連結するステップと、システムを動作させて光源が光源光路に沿って伝搬するコリメート光線を放射するようにするステップと、を有し、コリメート光線は、センサ光路に沿って伝搬するように反射され、部品の影を生成するように部品に入射し、検知装置はデータを影に対応して生成する。画像データは部品に対応して結果データを生成するために処理され、結果データは平滑化アルゴリズム、機能サイズアルゴリズム、センタリングアルゴリズムの少なくとも1つにさらに対応している。 (もっと読む)
光透過性フィルムの欠陥検出装置
【課題】ベースフィルムの一面側にコーティング層が設けられた光透過性フィルムにおけるコーティング層の膜厚むらによる欠陥の検出を簡易な構成且つ高精度で行うことができる光透過性フィルムAの欠陥検出装置を提供する。
【解決手段】ベースフィルムの一面側にコーティング層が設けられた光透過性フィルムAを搬送する搬送手段5を具備する。光透過性フィルムAに一面側から光を照射する照明手段6を具備する。照明手段6から照射され、光透過性フィルムAの一面側で反射された特定波長域の光を受光して撮像する撮像部1を具備する。前記撮像部1として、互いに異なる特定波長域の光を受光して撮像する複数の撮像部1が、前記搬送手段5による光透過性フィルムAの経路に沿って設けられている。
(もっと読む)
面位置検出装置、面位置検出方法、露光装置、およびデバイス製造方法
【課題】 光学部材の変動の影響を抑制して被検面の面位置を高精度に検出する。
【解決手段】 面位置検出装置は、第1パターンからの第1の光と第2パターンからの第2の光とを被検面(Wa)へ入射させて、被検面に対して第1パターンの中間像および第2パターンの中間像を投射する送光光学系(4〜10)と、被検面で反射された第1の光および第2の光をそれぞれ第1観測面(23Aa)および第2観測面(23Ba)へ導いて、第1パターンの観測像および第2パターンの観測像を形成する受光光学系(30〜24)と、第1観測面および第2観測面における第1パターンの観測像および第2パターンの観測像の各位置情報を検出し、各位置情報に基づいて被検面の面位置を算出する検出部(23〜21,PR)とを備えている。送光光学系は、例えば第2パターンの中間像を第1パターンの中間像に対して所定方向に反転された像として投射する。
(もっと読む)
対象物の物理的特徴を読み取るための方法及び装置
対象物上の物理的特徴を読み取る方法は、対象物の少なくとも一部の第1の画像を第1の解像度でキャプチャするステップ(240、315、405)と、第1の画像に従って処理されることになる対象物の領域の位置を決定するステップ(245、320、415、420)と、処理されることになる対象物の領域の第2の画像を第1の解像度よりも高い第2の解像度でキャプチャするステップ(255、330、430)と、第2の画像に基づいて物理的特徴を決定するステップ(260、335、440)と、を含む。幾つかの実施形態において、追加として、物理的特徴の少なくとも一部を表す情報を保持するマークで対象物をマーキングするステップがある。  (もっと読む)
(もっと読む)
顔面の覆体及び顔面部位特定方法
【課題】運転者の運転に対する注意レベルを精度良く推定することが可能となるような顔面の覆体及び顔面部位の特定方法を提供する。
【解決手段】運転者Dの顔面の口及び鼻に対応する位置における外表面4aにマーク7,8を描画する。このマーク7,8は、赤外光を発光または反射する塗料で描画されているため肉眼では確認することができず外観が損なわれることはないが、赤外領域に感度を有する顔画像撮像カメラ2で取得された顔画像中では、顔面の口及び鼻の位置を正確に特定することができる。
(もっと読む)
光干渉計及びそれを用いた膜厚測定方法
【課題】 干渉光学系を移動するだけで位置決めができ、迅速に精度よく膜厚を測定することができる光干渉計及びそれを用いた膜厚測定方法を提供する。
【解決手段】 波長スペクトルの狭い狭波長帯域をもつ狭波長帯域の光源11から射出された光束は、光束分岐手段20を経て光束分割合成手段31に入射し、参照光路30の光束は、参照鏡34で反射し、光束分割合成手段31に入射し、測定光路50に分割された光束は、被検物60の面で反射し、光束分割合成手段31に入射し、光束分割合成手段31で、参照光路30の光束と測定光路50の光束とが合成され、合成された光束は、光束分岐手段20を経て光電変換手段70に入射することを特徴とする。
(もっと読む)
指針指示角度算出装置、指針指示角度評価システム、及び、指針指示角度算出プログラム
【課題】画像情報から指針の指示角度を正確に算出できて、装置のコストダウンに貢献することを可能とする。
【解決手段】指示部12aとキャップ12bとを有する指針12の指示角度を、撮像手段30が指針12全体を撮像した画像情報に基づいて算出する指針指示角度算出装置10において、撮像手段30から画像情報を取得する画像情報取得手段41aと、画像情報取得手段41aが取得した画像情報における指針12の指示部12a及びキャップ12bの輪郭を抽出する輪郭抽出手段41bと、輪郭抽出手段41bが抽出した輪郭の慣性主軸を算出する慣性主軸算出手段41cと、慣性主軸算出手段41cが算出した慣性主軸と予め定められた基準軸とに基づいて指針12の指示部12aの指示角度を算出する指示角度算出手段41dと、指示角度算出手段41dが算出した指示角度を出力する指示角度出力手段41eと、を有することを特徴とする。
(もっと読む)
表面検査装置および照明光の光量制御方法
【課題】、基板を照射する照明光の光量を高い精度で検出して、基板表面の検査精度を向上させることができる、表面検査装置および照明光の光量制御方法を提供する。
【解決手段】 ウェハ10を載置保持するホルダ20と、ホルダ20により載置保持されたウェハ10の表面に照明光を照射する照明光学系30と、照明光が照射されたウェハ10の表面からの光を検出する撮像光学系40と、撮像光学系40で検出された光に基づいて、ウェハ10の表面における欠陥の有無を検査する画像処理装置50とを有する表面検査装置1において、ホルダ20の照明光を受ける位置に設けられた反射部61と、照明光が照射された反射部61からの正反射光の光量を検出する光量検出部62と、光量検出部62により検出された光量に基づいて照明光の光量制御を行う制御装置55とを有する。
(もっと読む)
2,001 - 2,020 / 4,968
[ Back to top ]