
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
2,021 - 2,040 / 4,968
形状測定装置
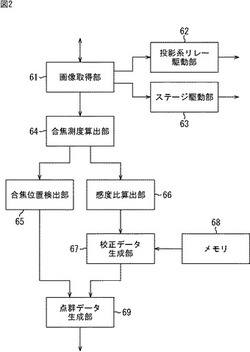
【課題】被検物の表面の性質の違いによる形状の測定誤差を低減させる。
【解決手段】形状測定装置は、投影系相対合焦位置および撮像撮像系相対合焦位置を調整でき、投影系相対合焦位置を独立して調整できる。感度比算出部66は、投影系相対合焦位置の変化に対する合焦測度の変化量と、撮像系相対合焦位置の変化に対する合焦測度の変化量との比である感度比を算出する。校正データ生成部67は、投影系校正データ、撮像系校正データおよび全体校正データのうち2つの校正データを、感度比に基づいて重み付けて加算することにより適用校正データを生成する。点群データ生成部69は、適用校正データを用いて、合焦位置検出部65により検出された合焦位置を補正する。本発明は、例えば、三次元形状測定装置に適用できる。
(もっと読む)
画像処理方法

【課題】立体画像のデータ量を削減出来る画像処理方法を提供すること。
【解決手段】二次元画像において、視点からの距離が既知である基準点につき、法線方向を求めるステップS11と、前記二次元画像において、視点からの距離が未知である非基準点につき、前記基準点を基準にした照度差に基づいて、視点からの距離及び法線方向を求めるステップS12とを具備し、前記二次元画像と、前記基準点における前記距離及び法線方向、並びに前記非基準点における前記距離及び法線方向とにより、該二次元画像の立体画像情報が表現される。
(もっと読む)
画像表示装置及び画像表示方法
【課題】照明光が照明された撮影対象物を撮影した画像により、撮影対象物の形状を明確に捉えることのできる画像表示装置及び画像表示方法を提供する。
【解決手段】撮影対象物2のまわりをかこむ周囲の複数の位置のそれぞれから順次照明光Lを撮影対象物2に照明したときの撮影対象物2の画像がカメラ3によって撮影される。そして該撮影により得られた複数の撮影画像にわたって対応する画素の明度の平均値が撮影画像の画素ごとに算出され、該算出された各平均値が、表示装置6に表示させる撮影対象物2の画像における対応画素の明度として設定される。
(もっと読む)
端面観察装置
【課題】被観察物の端面が,面取り加工された光沢性の強い端面であっても,その端面の広い範囲を一望できる撮像画像を得ること。
【解決手段】光を透過させて透過光を拡散させる拡散板が,被観察物1の端面からその端面に連なる表裏両側の面に渡る範囲に対して内側の面が対向する屈曲形状又は湾曲形状に形成され,その外側に配置されたカメラ30の位置から被観察物の端面1aが見える覗き窓14が設けられた光拡散部材11と,その光拡散部材11の外側に配列され,光拡散部材11を介して端面1aを照明する複数のLED12と,前記覗き窓14に向かうカメラ30の光軸方向に交差する方向へ光を照射するLED21及びレンズ22と,カメラ30と前記覗き窓14との間においてLED21からの光を反射して前記覗き窓14を通じて端面1aに照射するとともにその端面1aからの反射光をカメラ30側へ通過させるハーフミラー23とを備える。
(もっと読む)
路面勾配推定装置
【課題】路面の勾配角度をより精度良く推定することが可能な路面勾配推定装置を提供する。
【解決手段】カメラ1による複数のカメラ画像に基づいて、自車両Cが位置する路面の勾配角度を推定する路面勾配推定装置10であって、各カメラ画像に共通する静止物を特徴点として抽出する抽出部31と、抽出部31によって抽出された特徴点が複数のカメラ画像にわたって移動する移動量を検出する検出部32と、検出部32によって検出された移動量に基づいて自車両Cのピッチ角を算出する算出部33と、自車両Cの上下方向の加速度を示すセンサ値を取得するGセンサ2と、Gセンサ2によって取得されたセンサ値と算出部33によって算出されたピッチ角とに基づいて勾配角度を演算する補正部34と、を備える。
(もっと読む)
光画像計測装置
【課題】被測定物体の異なる部位を描写する複数のOCT画像を基に被測定物体の物理量を高い確度で計測可能な技術を提供する。
【解決手段】光画像計測装置1は、低コヒーレンス光L0を信号光LSと参照光LRとに分割し、参照光LRの光路を光路長の異なる二つの光路に分割することで参照光LRを二つの参照光LRa、LRbに分割する。更に、光画像計測装置1は、これら二つの光路をそれぞれ経由した参照光LRa、LRbと被検眼Eを経由した信号光LSとを干渉させて、被検眼Eの二つの深度位置(眼底Ef、角膜Ec)のそれぞれにおける形態を反映した干渉光LCを生成し、この干渉光LCを検出して検出信号を生成する。そして、光画像計測装置1は、この検出信号に基づいて眼底断層画像と角膜断層画像を形成し、これら断層画像を解析して被検眼Eの角膜網膜間距離を求める。
(もっと読む)
欠陥検出装置及び方法
【課題】検査対象の搬送速度に変動が生じても、欠陥を確実に検出する。
【解決手段】搬送中のフイルムを受光器により撮像する。撮像により得られるフレーム画像60にハフ変換を施し、直線62を検出する。直線62のうち、フレーム画像の中心C1に最も近い中心直線62aを特定する。中心直線62aと交差する直線の交点67を求める。求めた交点67の座標を用いて、X軸方向の隣接交点間距離P1〜P15及びY軸方向の隣接交点間距離Q1〜Q15を求める。隣接交点間距離P1〜P15及びQ1〜Q15に基づいて、比較ピッチXp,Ypを求める。フレーム画像60上の指定画素とその指定画素から比較ピッチ分Xp,Ypだけ離れた比較画素を特定する。指定画素及び比較画素の濃度値に基づき、指定画素について差分処理を行う。フレーム画像60の画素の全てに対して差分処理を行うことにより、フレーム画像60からメッシュ部63が除去される。
(もっと読む)
表面検査装置および照明光の光量制御方法
【課題】、基板を照射する照明光の光量を高い精度で検出して、基板表面の検査精度を向上させることができる、表面検査装置および照明光の光量制御方法を提供する。
【解決手段】 ウェハ10を載置保持するホルダ20と、ホルダ20により載置保持されたウェハ10の表面に照明光を照射する照明光学系30と、照明光が照射されたウェハ10の表面からの光を検出する撮像光学系40と、撮像光学系40で検出された光に基づいて、ウェハ10の表面における欠陥の有無を検査する画像処理装置50とを有する表面検査装置1において、ホルダ20の照明光を受ける位置に設けられた反射部61と、照明光が照射された反射部61からの正反射光の光量を検出する光量検出部62と、光量検出部62により検出された光量に基づいて照明光の光量制御を行う制御装置55とを有する。
(もっと読む)
表面欠陥検査装置
【課題】誤検出を低減して欠陥検出の精度を高め、しかも検査時間の短縮とコスト低減とを同時に図る。
【解決手段】照明光学系は、光を焦点面上に集光して被検査物100に照射するとともに前記焦点面上の集光点を走査させる。光分割部20は、被検査物100から得られる光を分割する。第1の光検出部21Aは、集光レンズ31A、光制限部32A及び光検出器33Aを有し、分割後の一方の光を検出する。第2の光検出部21Bは、集光レンズ31B、光制限部32B及び光検出器33Bを有し、分割後の他方の光を検出する。光制限部32Aと共役な平面と光制限部32Bと共役な平面とは、前記焦点面の付近において、互いに光軸方向にずれている。
(もっと読む)
動きベクトル算出装置、障害物検出装置および動きベクトル算出方法
【課題】1台のカメラのみを用いて障害物を検出する場合、車両が低速走行しているときでも、車両の動きベクトルを正確に算出することを可能にする「動きベクトル算出装置、障害物検出装置および動きベクトル算出方法」を提供する。
【解決手段】車載カメラ140によって撮像された車両周囲画像内の予め定めた位置の部分画像をトラッキング対象画像として抽出するトラッキング対象画像抽出部340と、当該複数の車両周囲画像のそれぞれにおいて位置検出部360が検出したトラッキング対象画像の位置の変化に基づいて車両の動きベクトルを算出する動きベクトル算出部380とを備え、車速センサの検出結果を使用しなくても、画像処理によって車両の動きベクトルを算出することができるようにする。
(もっと読む)
遠隔点検補修システム、そのキャリブレーション方法及び補修方法
【課題】システム構成が簡素で運用が容易となるように、1台の機構に既存の小型のセンサを少数組込み、形状計測、点検、補修をオペレータが効率的に遠隔操縦できる遠隔点検補修システムを提供する。
【解決手段】補修施工用のレーザ発射部4aを有し、施工対象の構造物を監視して補修箇所を検知するテレビカメラ17が取付けられたヘッド部4と、構造物の3次元形状を計測する形状計測センサ6と、形状計測センサ6及びヘッド部4の駆動機構1と、形状計測センサ6からの信号により構造物の補修箇所の3次元形状位置データを得て、ヘッド部4の施工経路に基づいた駆動機構1の駆動データを生成し、駆動機構1を遠隔で制御する制御装置11と、を備える。
(もっと読む)
較正
本発明は光源、光学素子およびセンサを含む測定システムを較正する方法に関する。光源は光平面を生成するようにされ、光学素子は光平面とセンサとの間に位置する。本方法は、センサ上の少なくとも1つの点から光平面内の少なくとも1つの点への写像を得るために実行される。本方法は、光平面が生成されるように光源をオンにする工程と、光平面内の第1の写像位置に写像較正プロファイルを導入する工程と、を含み、写像較正プロファイルは直線を形成する少なくとも3つの点を含む。本発明はまた、このような較正方法に使用可能な較正物体に関する。  (もっと読む)
(もっと読む)
露光装置及びデバイス製造方法
【課題】
レチクルとウェハ(ウェハステージ)との位置合わせ計測に用いる手順を状況に応じて変更させるようにした露光装置及びデバイス製造方法を提供する。
【解決手段】
原板(レチクル)ステージに保持された原板を基板(ウェハ)ステージに保持された基板に位置合わせして原板のパターンを基板に投影し基板を露光する露光装置であって、原板に付されたマークと基板ステージに付されたマークとの位置関係を計測する計測部と、原板に付されたマークと基板ステージに付されたマークとを計測部の視野内に入れて計測部に計測を実行させる制御部とを具備し、制御部は、第1の手順(第1の手順は、第2の手順よりも計測部による原板に付されたマークの計測回数が少ない)及び第2の手順を少なくとも含む複数の手順のいずれかにしたがって計測部に計測を実行させ、当該実行した計測により得られた結果に応じて位置合わせを行なうように構成される。
(もっと読む)
形状測定装置およびその形状測定方法
【課題】短時間のうちに光沢面の表面形状を正確に測定できる形状測定装置およびその形状測定方法を提供する。
【解決手段】形状測定装置1は、顕微鏡用試料台16に載置された試料15の表面像を撮像する撮像部25と、撮像部25の撮像光学系の光軸に沿って、撮像光学系を試料15に対して周期的に相対移動させ、移動量を記憶して出力するピエゾ駆動制御装置と、表面像に試料15の表面の凹凸を反映した試料15の表面からの反射光の強度ムラを重ねる二光束干渉対物レンズ14と、ピエゾ駆動制御装置から出力される撮像部25の移動距離値の中、二光束干渉対物レンズ14により反射光の強度ムラが重ねられた表面像を撮像する撮像部25により撮像される複数の表面像の合焦度が最大となる移動距離値に基づいて、試料15の表面の相対高さを演算して試料15の表面形状を求める制御用プロセッサ27とを備える。
(もっと読む)
真直度測定装置
【課題】真直度を効率よく測定することができる真直度測定装置を提供すること。
【解決手段】本発明の真直度測定装置10は、被測定物M上を自走可能であり反射ミラーを載置した筐体11と、筐体11とは別に設置されたオートコリメータ12と、筐体11の走行距離データ、及びオートコリメータ12からの傾斜データを処理し被測定物Mの真直度を算出する解析用コンピュータ13とを備えている。筐体11は、その底面側にタイヤ8a、8bを有し、タイヤ8bの回転によって筐体11の走行距離が求められ、その走行距離は解析用コンピュータ13に入力されて被測定物M上における筐体11の位置が算出される。
(もっと読む)
センサの位置を決定するための方法及び装置
【課題】センサの空間位置を決定するための改善された方法及び改善された装置を提案する。
【解決手段】この装置及び方法は、センサの空間位置を決定するための方法及び装置であり、まず、センサの位置を大まかに検出することによって大まかな位置情報を決定し、次に、センサに搭載された少なくとも3つの反射器をレーザ追跡装置によって測定することによってセンサのより精確な位置を取得する。レーザ追跡装置のレーザが反射器を探索する探索領域は、大まかな位置情報を基準として制限される。
(もっと読む)
検査装置
【課題】 バンドパスフィルタを用いて制限した光を被検物の表面に当てて、その反射光により被検物の表面を安定的に観察する。
【解決手段】 被検物を照射する光の光源と、該光源の光から所定の波長成分を抽出する第1のフィルタと、記第1のフィルタを通過した光のうち前記所定の波長成分の範囲内であり前記第1のフィルタよりも狭い帯域の抽出特性を有する第2のフィルタと、前記第1のフィルタと前記第2のフィルタとで抽出された前記光で前記被検物を照明する照明光学系と、前記照明された前記被検物の観察を行う観察光学系とを用いる。
(もっと読む)
検査装置および検査方法
【課題】回路パターンの検査において、ソルダレジストが塗布された部分は画像データの輝度が低くなるため、画像処理を利用した欠陥検査では回路パターンを取得しにくかった。ソルダレジストが塗布された部分の回路パターンを得るためには、照射する光を強くする必要があるが、ソルダレジストを塗布しなかった部分は白飛びになってしまい、ソルダレジストがある部分と無い部分を検査するための検査装置が必要であった。
【解決手段】回路パターンに光を照射する照明手段と、前記回路パターンの画像データを取得する撮像手段と、撮像手段によって得られた画像データ中の反射光強度分布が異なる領域の画素値を各々1箇所以上測定する画素値測定手段と、測定された画素値に基づいて回路パターンに照射する光の照射角度を調整する光照射角度調整手段と、撮像手段によって得られた画像データに基づいて欠点を検出する欠点検出手段を有する回路パターンの検査装置。
(もっと読む)
画像処理によるラインセンサ仰角測定装置
【課題】簡素な構成でラインセンサの仰角を高精度に計測することができる画像処理によるラインセンサ仰角測定装置を提供する。
【解決手段】ラインセンサ仰角測定装置を、表面に直線状の境界線11を挟んで黒色部分12と白色部分13とが配され、表面が鉛直方向に平行になるように且つ境界線11が水平方向に平行であって基準面から所定の高さhに位置するように設置されるターゲット1と、焦点距離f及びターゲット1との水平方向の距離dが既知であって、走査線方向が境界線11に直交するように基準面に設置されて境界線11を撮像するラインセンサ2と、ラインセンサ2によって撮像した画像を処理して境界線11の画像上の位置を求めるとともに、得られた境界線11の画像上の位置に基づいてラインセンサ2の仰角θを算出する画像処理部3とから構成した。
(もっと読む)
形状測定装置
【課題】 光に対する測定対象物毎の反射率が異なることにも関らずに、三次元形状を計測することができる形状測定装置を提供する。
【解決手段】 形状測定装置は、第1波長帯域の光と該第1波長帯域とは異なる第2波長帯域の光を射出する光射出手段と、第1波長帯域の光に対する反射率と第2波長帯域の光に対する反射率が異なる参照面を有する参照ミラーと、第1波長帯域及び第2波長帯域の光を測定対象物に照射する測定光と参照面に照射する参照光とに分割すると共に、参照面で反射した参照光と測定対象物で反射した測定光を合成して合成光とする光分割合成部材と、合成光により形成される干渉縞画像を撮像する撮像部と、干渉縞画像を解析して測定対象物の形状を算出する形状算出部とを備える。
(もっと読む)
2,021 - 2,040 / 4,968
[ Back to top ]