
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
701 - 715 / 715
磁気ディスク基板の表面粗さ測定方法および測定装置並びに磁気ディスクの製造方法

【課題】 磁性媒体の性能向上と磁気ヘッドの低浮上化の進行に伴い、ディスク基板の表面粗さはより小さくなる傾向に対応して、AFMよりも測定時間が短く、非破壊で、高精度、かつ、再現性のよい測定方法及び測定装置を提供すること、および、上記測定方法及び測定装置により、磁気ディスク基板のテクスチャの不良を選別し、不良品の磁気ディスクの発生を低減可能な磁気ディスクの製造方法を提供することが課題である。
【解決手段】 磁気ディスク基板の表面にレーザ光を照射して、該磁気ディスク基板の表面の粗さを測定する方法・装置において、上記レーザ光を集束し、磁気ディスク基板の表面に入射するレーザ光の光軸と、光軸がテクスチャと接する点のテクスチャ接線とのなす角度、および、磁気ディスク基板の表面に入射するレーザ光の入射角度をほぼ一定に保ち、基板表面からの散乱光を2次元アレイ光センサー上に受光し、受光信号から散乱光強度分布を算出し、散乱光強度分布を表面粗さの数値に換算するようにした。
(もっと読む)
画像測定機、およびデータ作成装置

【課題】画像測定機において、被検物の輪郭形状を測定する場合の測定時間を短縮させる。
【解決手段】画像測定機にステージ5上に載置された被検物6を撮像して撮像した画像を出力する撮像部4と、ステージ5上に載置された被検物6を撮像部4が撮像する撮像位置に対して相対移動させる移動装置と、制御ユニット2とを設け、制御ユニット2に、移動装置を制御して、予め設定された被検物の測定点の位置を撮像部4に相対移動させ、かつ撮像部4に撮像位置における被検物6の画像を撮像させて出力させる撮像制御部と、撮像部4が出力する画像内の複数の測定点の座標値を求める画像処理部と、被検物6の測定点の位置を撮像位置に移動させる際の複数の候補位置を求めて、複数の候補位置のうち、測定点が最も多く含まれる候補位置を次に移動する位置に決定する位置決定部とを設ける。
(もっと読む)
表面検査装置
【課題】設置スペースを増大させることなく、効率的に検査対象物の表面状態を検査することができる表面検査装置を提供する。
【解決手段】光源11、12およびCCDカメラ30は、印刷版21の上方に固設される。また、保持部22は、印刷版21を保持しつつ、駆動部23によって移動方向AR1に移動可能に設けられている。また、CCDカメラ30の本体部32には、印刷版21の移動方向AR1と略垂直な方向に延伸する複数のCCD(受光部)が設けられている。これにより、CCDカメラ30では、光源11から照射されて印刷版21で反射された反射光と、光源12から照射されて印刷版21で反射された拡散光とを同時に受光することができるため、一度の撮像処理で印刷版21の表面の凹凸状態の検査と印刷版21に描画された印刷画像の描画状況とを同時に検査することができる。
(もっと読む)
立体物イメージスキャナ
【課題】 立体物のイメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、前方の鉛直な線状のターゲット平面領域48にピントが合っている。鉛直で線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明光する。光源34A、34Bの全箇所からの照明光の鉛直面に沿った出射角度が規制され、それにより、ターゲット平面領域48の全箇所にて、照明光の鉛直面に沿った入射角と光量が一定にされる。スキャニングユニット24と光源34A、34Bが一緒にX、Y、Z方向に移動して、被写体の空間15を多数のレイヤとバンドに分割してスキャンする。スキャンで得た画像データからピントの合った画素が抽出され合焦点画像が合成される。
(もっと読む)
石膏型形状計測器
【課題】義肢のソケットを製作するための石膏型の形状計測を行う石膏型形状計測装置においては従来石膏型の外部側面、内部側面は測定できたが内部底面が測定できなかったので内部底面をも測定できる形状測定器を提供することが課題であった。
【解決手段】 測定対象物に照射するための投光レーザ光と、測定対象物からの反射レーザ光を結像するための結像レンズと、結像レンズによる結像光を受光して結像位置に関する信号を出力する位置検出素子(PSD)とを備えた測定ヘッドと、測定対象物を回転させるステージと、測定対象物もしくは測定ヘッドを前記ステージの回転軸方向へ移動させる移動ステージとを備えた、測定対象物の3次元形状を測定する形状計測器であって、測定ヘッド先端に投光レーザ光、反射レーザ光を反射する可動反射ミラーを設け、可動反射ミラーの回転により投光レーザ光、反射レーザ光の投光受光方向を可変する構造とした。
(もっと読む)
高さ測定方法及び高さ測定装置、並びに信号処理方法
【課題】振動の影響を受けずに、被測定物の高さを精度良く測定する。
【解決手段】受光系の焦点位置を移動しながら、被測定物の表面又は基準面からの反射光をピンホール14を通して受光する。受光系の焦点位置が測定物の表面又は基準面に合っていないとき、反射光はピンホール14で遮断されてほとんど受光されない。受光系の焦点位置が測定物の表面又は基準面に合ったとき、反射光はピンホール14を通過して強く受光される。受光した反射光の輝度信号の変化から、被測定物の表面に合った光学系の焦点位置と、基準面に合った光学系の焦点位置とを検出し、両者の差異から被測定物の高さを求める。
(もっと読む)
変位検出器
【課題】 板ばねの撓みによる横ずれを抑制し、変位検出を正確にできる変位検出器を提供すること。
【解決手段】 板ばね221A〜Dによって対物レンズ1を光軸方向に変位させる構成の合焦点式変位検出器において、対物レンズ1の横ずれを補正するための板ばね311A〜Dが設けられる。板ばね221A〜Dが撓められると、対物レンズ1は光軸方向と垂直な方向に横ずれするが、このとき、板ばね311A〜Dを撓めることによって、横ずれを相殺する。横ずれを相殺することによって、対物レンズ1の軌道を正確に光軸方向と一致させることができるので、光源から出射され対物レンズ1を通じて被測定物W上に照射される光の照射位置が所期の照射位置Pからずれることがない。そのため、被測定物Wの表面形状が対物レンズ1の光軸に対して大きく傾斜している場合であっても、変位検出を正確にできる。
(もっと読む)
検出装置及びステージ装置
【課題】 本発明は高精度に可動されるステージの位置及び傾きを正確に検出することを課題とする。
【解決手段】 透過型検出装置22は、第1ステージ14の移動方向に延在形成された透明体角度格子30と、透明体角度格子30を垂直状態に保持する透明基板32と、透明体角度格子30に向けて複数の平行光を発光する発光部34と、透明体角度格子30を透過した複数の平行光を受光する受光部36とを有する。受光部36には9個のフォトダイオードが配置され、透明体角度格子30を透過した複数の平行光の受光強度分布を検出する。そして、受光部36で検出された強度分布の変化から固定側の透明体角度格子30に対する発光部34の位置及び傾き角度を検出することが可能になる。
(もっと読む)
画像生成方法及び装置
【課題】 現実世界又はその映像に位置合わせされたCG画像を生成する画像生成方法において、任意の現実物体について、CG画像を重畳した状態としない状態とを観察者が容易に観察可能とすること。
【解決手段】 CGを重畳しないCGマスク領域を設定しておき、CGマスク領域に含まれる現実物体にはCGを重畳しないようにする。任意の現実物体について選択的にCGが重畳された状態と重畳されない状態とを観察することが可能になる。
(もっと読む)
人の視覚挙動を決定するための方法と装置、並びに眼鏡用レンズのカスタマイズ法
本発明は人の視覚挙動を決定するための方法と装置に関する。本発明の方法は、次のステップ、即ち、被験者の頭部の動きを記録するステップ、被験者の眼球運動を記録するステップ、頭部に対する眼の相対的方位を決定するステップ、及び眼球が各方位に維持されていた時間の量を決定するステップを含む。上記時間の量は、有限区間内の方位の記録を収集し、各区間内の記録の数(頻度)を計数することによって求められる。前記方位は、頭部と眼球の両方に対して角座標を用いて特定される。データは、頭部に固定される発光素子(51)、カメラ(63)及び被験者の視線を引き付けるためのスクリーン(611、612)を備えたデバイスの援助により検知及び処理される。本方法から得られる結果は、眼鏡用レンズの設計をカスタマイズするために用いられる。
 (もっと読む)
(もっと読む)
点呼機構に基づくエレベータ位置決め用視覚装置
位置決め装置は、電磁信号を受信し、かつ光信号を送信するために既知の場所にそれぞれ配置された複数のトランスポンダモジュールと、電磁信号を送信し、かつ光信号を受信する少なくとも1つのトランシーバモジュールと、少なくとも1つのトランシーバモジュールの位置を決定するために、受信した光信号を処理する装置と、を備える。  (もっと読む)
(もっと読む)
表面の形状を測定する装置および方法
本発明は、床などの硬質または半硬質基板上で用いるための表面形状測定装置を提供する。本装置は、(a)ビームと、(b)ビームに装着される少なくとも1つのビームサポートと、(c)該ビームに摺動可能に接続され、かつ表面までの距離を測定するように構成されるセンサアセンブリと、(d)該ビームに沿って該センサアセンブリの位置を測定するように構成される変換器アセンブリとを含む。  (もっと読む)
(もっと読む)
レーザ投影システム及び方法
表面上にレーザテンプレートを投影するレーザイメージングシステムと方法とは、外部計測装置を使用して表面の位置と方向とを独立して決定する工程と、計測装置を使用してレーザ投影装置の位置と方向とを独立して決定する工程と、レーザテンプレートを投影するために、計測装置からコンピュータへの信号を生成し、表面に対してレーザ投影装置の方向を定める工程とを含む。装置は、固定された場所にある複数の計測発信装置と、表面に対して固定された位置にある複数の計測受信装置と、レーザ投影装置の視界の範囲内にあり、且つ、レーザ投影装置かレーザターゲットのどちらか一方に対して固定された位置にある複数の計測受信装置とを含む。レーザ投影装置とフレームとからなるアセンブリもまた開示されており、計測受信装置はフレーム上に配置され、フレームはレーザドリフトを修正するためのレーザターゲットを含む。計測受信装置のための可動支柱は独立したレーザ追尾装置と同様に開示されている。  (もっと読む)
(もっと読む)
カメラを備えた機器を制御システムによって所望位置へ動かす方法及びその制御システム
制御システム(7)によってカメラ(5)を備えた機器(4)を所望位置(10)へ動かす方法。カメラ(5)は、制御システム(7)に接続されている。動かしている間、カメラによって写真が撮影される。制御システム(7)によって単位時間あたりに処理される写真の枚数は、機器(4)と所望位置(10)の間隔が短くなると、増加される。
 (もっと読む)
(もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 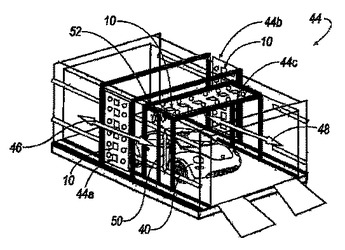 (もっと読む)
(もっと読む)
701 - 715 / 715
[ Back to top ]