
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
161 - 180 / 715
位置検出装置、位置検出方法および基板重ね合わせ装置
【課題】互いのウェハを位置合わせして重ね合わせるときに、ステージの回転量が所定量を超えてしまうと、ステージの正確な位置を把握することが困難となる。ステージの回転量が所定量を超えないように制御するには、そもそも最初にステージに置かれるウェハの位置を厳密に管理する必要がある。
【解決手段】位置検出装置は、第1基板に設けられた少なくとも2個の第1基板指標を一度の撮像動作により撮像する第1撮像ユニットと、第1撮像ユニットにより撮像された画像に基づいて第1基板指標の位置を計測することにより、第1基板の姿勢を測定する測定部とを備える。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法

【課題】光ビームにより基板を走査して、新たなパターンを下地パターンに合わせて精度良く露光する。
【解決手段】チャック10に位置検出用マークを設け、チャック10の位置を検出しながら、ステージによりチャック10を移動して、各画像取得装置51によりチャック10の位置検出用マークの画像を取得し、検出したチャック10の位置及び画像処理装置50が検出したチャック10の位置検出用マークの位置から、各画像取得装置51の位置ずれを検出して、各移動機構により各画像取得装置51の位置ずれを修正する。各画像取得装置51により基板1の下地パターンの位置検出用マークの画像を取得し、画像処理装置50が検出した基板1の下地パターンの位置検出用マークの位置に応じて、ステージによりチャック10を移動して、光ビーム照射装置20からの光ビームにより基板1を走査する前の基板1の位置決めを行う。
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
レールシート摩耗に対する傾き補正システムおよび方法
鉄道線路軌道のレールシート摩耗(rail seat abrasion)を決定するためのシステムおよび方法が開示される。検査システムが、レーザ、カメラ、およびレールシート摩耗が軌道に沿って存在するかどうかを決定するように適合されるプロセッサを含む。プロセッサは、検査システムが軌道に沿って動くときに遭遇される傾きを補償する数学ベースのアルゴリズムを用いる。  (もっと読む)
(もっと読む)
計測装置及び計測方法
【課題】 船舶やトラック等で運搬され、製鉄所等のヤード内に積み上げられた鉄鉱石や石炭等の原料の山の山形形状を、正確かつ短時間で計測可能な計測装置を提供する。
【解決手段】 GPSアンテナ、レーザースキャナ、及びGPS受信機搭載のセンサBOXを含む計測装置を山積み用のアームに取り付ける。レーザスキャナは山に向けてレーザビームを一方向に走査し、前記レーザビームの走査角度と前記レーザビームの照射対象物までの距離とを関連付けて出力する。アームは回転可能であり、一方向に走査するレーザビームが前記山の全体を走査するように回転台を回転制御する。このようにアームを回転させながら正確な時刻が付加されたGPSデータとレーザースキャナデータを収集し、収集したデータに基づく演算処理によって山積みされた山の形状を再現する。
(もっと読む)
対象物検出装置及び対象物検出方法
【課題】周辺の状況や観測機器による影響を抑え、対象物を正確に検出することのできる対象物検出装置を得る。
【解決手段】射影装置2は、記憶装置1に記憶されている3次元の座標値をもつ点群データを平面に射影した射影パターンを生成する。平滑化装置3は、対象物に対し平滑化した射影パターン上でピークを生成するよう射影パターンを平滑化する。照合装置4は、平滑化した射影パターンとテンプレートパターンとを照合し、対象物が存在した地点の平滑化した射影パターンと一致あるいは近似するテンプレートパターンとの相関が高い平滑化した射影パターン上の位置を対象物の存在位置として検出する。
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
中空光導波路における磁場を用いた光路長調整方法及び装置
【課題】本発明の課題は、光導波路の中空部分に挿入した反射材を磁場発生手段で光導波路の長手方向に移動させて光路長を所望の値に設定することにある。
【解決手段】本発明は、中空構造の光導波路400の中空部分に、磁性を有する反射材501が長手方向に移動自在に挿入され、光導波路400の外部に磁場を発生することが可能な磁場発生手段504が設置され、光導波路400内の光路長を、反射材501を磁場発生手段504で光導波路400の長手方向に移動することにより調整する中空光導波路における磁場を用いた光路長調整方法である。
(もっと読む)
位置計測システム及び位置計測方法
【課題】対象物のステレオ視によって対象物の位置を計測するに際し、量子化誤差を軽減することができる位置計測システム及び位置計測方法を提供する。
【解決手段】位置計測システム1では、対象物Tのステレオ視において2台のカメラの視線領域が重なる重複領域に対象物Tの真値(真の座標)が存在することに鑑み、視線領域SR1,SR2が、カメラ21,22の移動によって、隣り合う一方の視線領域から他方の視線領域に移動したことを検出したときには、視線領域SR1と視線領域SR2とが重なる重複領域DR1のうち、一方の視線領域と他方の視線領域との境界領域に対象物Tが位置すると判断し、対象物Tの位置を算出する。これにより、重複領域DR1から境界領域へと、真値が存在する領域が狭められる。
(もっと読む)
表面特性を用いて対象物の特定および/または認証をするための方法、および、その方法に使用するセンサ
本発明の主題は、表面特性を用いて、対象物の特定および/または認証をするための方法である。本発明のさらなる主題は、表面を走査するためのセンサである。 (もっと読む)
温度画像の三次元化装置
【課題】コンピュータ上で深さ方向の温度分布を対象物体を回転しながら確認することができる温度画像の三次元化装置を提供する。
【解決手段】既知の座標を有する複数の豆電球22を基準点とする基準物21と、対象物1及び基準物21からの発熱に基づいて対象物1の三次元情報を取得する三次元情報取得手段27と、実座標と温度画像座標とのキャリブレーションを行なう座標キャリブレーション手段31と、実座標から温度画像情報の温度画像座標への変換式を決定する変換式決定手段32と、決定された変換式に基づいて対象物1の三次元情報に係る全ての実座標を温度画像座標に変換する座標変換手段33と、変換された三次元情報の温度画像座標に基づいて三次元情報の温度情報を抽出する温度情報抽出手段34と、温度画像情報中の特定の温度画像座標と三次元情報中の特定の実座標とを対応付ける座標対応付手段35と、を備えて構成されている。
(もっと読む)
道路レーンデータ生成装置、道路レーンデータ生成方法および道路レーンデータ生成プログラム
【課題】次世代の道路ネットワークデータを容易に生成できるようにする。
【解決手段】車線中心点群算出部110は、各車線の側線上に位置する複数点を示す車線側線点群データ181に基づいて、各車線の中心線上に位置する複数点を示す車線中心点群データ191を生成する。車線毎道路線形データ生成部120は、車線中心点群データ191に基づいて、各車線の線形を示す車線毎道路線形データ192を生成する。停止線/横断歩道ノードデータ生成部130は、車線中心点群データ191と各停止線および横断歩道上に位置する複数点を示す停止線/横断歩道点群データ182とに基づいて、停止線/横断歩道ノードデータ193を生成する。道路ネットワークデータベース生成部140は、車線毎道路線形データ192と停止線/横断歩道ノードデータ193とに基づいて、道路の線形および停止線/横断歩道を車線毎に示す道路ネットワークデータ194を生成する。
(もっと読む)
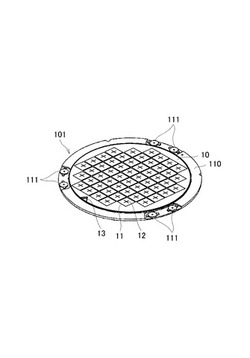
フォトマスク、投影装置および位置計測システム
【課題】高い分解能を実現することができるフォトマスク、投影装置、位置計測システムおよびフォトマスク製造方法を提供すること。
【解決手段】フォトマスク10には、照射光源21からの光が照射される。フォトマスク10は、照射光源21から照射された光を透過させる透過部12bおよび当該光を遮蔽する遮蔽部12aを有するバイナリ部12と、遮蔽部12aより小さな面積の複数の小面積図形からなり、照射光源21から照射される光を遮蔽する微小遮蔽部15aを有する階調部13と、を備えている。
(もっと読む)
レーザ変位計
【課題】被測定膜の厚さを簡便に測定可能とするレーザ変位計を提供する。
【解決手段】レーザ変位計は、波長可変レーザ光源11と、軸上色収差光学系13と、被測定膜SAの表面及び裏面にて反射されたレーザ光を軸上色収差光学系13を介して受光してレーザ光の被測定膜SAの表面及び裏面上での結像状態を検出する光検出部14と、波長可変レーザ光源を制御して出力されるレーザ光の波長を変化させる制御部21とを備える。制御部21は、光検出部14により被測定膜SAの表面及び裏面上でのレーザ光の合焦が検出された場合におけるレーザ光の波長に基づき被測定膜SAの表面位置hs及び仮の裏面位置hbdを求め、表面位置hs及び仮の裏面位置hbdから被測定膜SAの仮の厚さTdを特定する。制御部21は、被測定膜SAの膜種、仮の裏面位置hbd、仮の厚さTdに基づき被測定膜SAの真の厚さを特定する。
(もっと読む)
正射投影画像を作成するための画像処理方法、装置およびプログラム
【課題】 撮影による画像の取得から正射投影画像の作成までを簡易化し、正射投影画像を精度良く作成する画像処理方法、装置およびプログラムを提供する。
【解決手段】 本発明は、所定間隔で離れた二つの標点を持つ被写体が対象面上に配置された状態で対象面を撮影機器によって撮影した画像の情報、撮影条件に関する情報および撮影機器の光学特性に関する情報を取得する情報取得工程と、撮影条件に関する情報および撮影機器の光学特性に関する情報から射影変換式を定めた上で、被写体における二つの標点間の距離情報を考慮して射影変換式を決定する要素を調整し、調整された射影変換式に基づき、撮影画像を正射投影画像に変換する画像変換工程とを備える。
(もっと読む)
高さ検出装置
【課題】回折を用いる場合に所望の次数の回折光の全ての波長を検出に利用できるようにする。
【解決手段】反射光のうちワーク1表面付近で焦点を結んだ光以外の光の通過を規制する光ファイバ121と、光ファイバ121を通過した反射光を同一平面内に広がる回折光に分岐させる回折光学素子122と、回折光に含まれる1次回折光と高次回折光とのうちで1次回折光のみを検出する1次回折光検出手段130とを有する高さ検出手段120を備え、1次回折光検出手段130は、回折光を集光する回折光集光レンズ131と、集光される回折光を、同一平面外の方向へ波長毎に異なった角度で屈折させる波長分散フィルタ132と、1次回折光が集光される箇所にのみ検出部を有し、1次回折光のみの波長毎の光強度を検出する波長検出センサ133と、色収差レンズ102によって集光される白色光の各波長の焦点距離を記憶した制御マップを格納するメモリ134とを含む。
(もっと読む)
位置検出装置及び位置検出方法
【課題】屋内の移動体の位置検出に好適に適用でき、容易に導入可能な位置検出装置を提供する。
【解決手段】位置検出装置は、それぞれ異なる位置に配設されかつそれぞれ異なる光学特性を有する光を発光する屋内照明としての複数の発光部2a,2bと、前記発光部2a,2bから発光された光を受光して光強度信号を出力する受光部4を有する移動体と、前記複数の発光部2a,2bが配設されている位置と発光特性を対応づけた発光部情報5を格納する記憶部14,17と、前記受光部から出力された信号に含まれるそれぞれ異なる光学特性ごとの光強度信号と、前記記憶部14,17に格納されている発光部情報5に基づいて、前記移動体の位置を検出する位置検出演算部6とを備える。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
大規模カメラネットワークの較正
本開示は、複数のノード(12)を含み、各ノードは、指向性を有するセンサ(18)と、通信モジュール(14)と、指向性を有するセンサ(18)から較正オブジェクト(20)のローカルな測定値を受信し、通信モジュール(14)を介して近傍ノード(12)から較正オブジェクト(20)の追加的な測定値を受信し、ローカルな及び追加的な測定値に応じて較正パラメータの初期集合を推定し、通信モジュール(14)を介して近傍ノード(12)から較正パラメータの追加的なセットを受信し、較正パラメータの追加的な集合に応じて較正パラメータの更新された集合を再帰的に推定するよう構成されたプロセッサ(16)とを有する、センサネットワーク(10)に関する。カメラノード(12)の大規模ネットワーク(10)を構成する更なるシステム及び方法が開示されている。 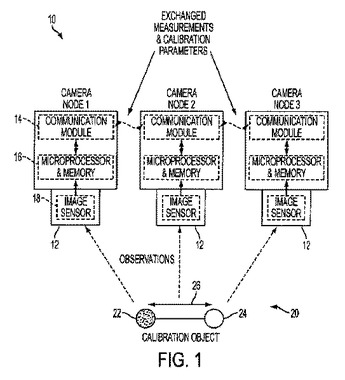 (もっと読む)
(もっと読む)
正反射面の相対位置を測定する方法及び装置
【課題】測定線に沿う物体34の正反射面の相対位置を測定する方法において、正反射面の傾斜角の許容範囲を広くする。
【解決手段】 (a)少なくとも1本の集束光ビーム38を測定線上の公称位置40に集束させ、正反射面からの反射ビーム44を形成する。(b)検出器平面50における反射ビーム44の像を記録する。(c)検出器平面50内の反射ビーム44の像の位置を決定する。(d)その反射ビームの像の位置を測定線に沿う公称位置40からの正反射面の変位に変換する。工程(a)において、複数本の集束光ビーム38を公称位置40に集束させることが好ましい。
(もっと読む)
161 - 180 / 715
[ Back to top ]