
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
201 - 220 / 715
変位センサ
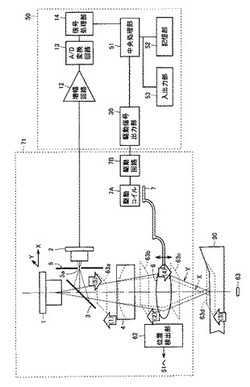
【課題】多様な表面状態を有する計測対象物に対して、高速に精度よく変位を計測する。
【解決手段】対物レンズ6を光軸に沿って移動させる共焦点光学系を備える変位センサにおいて、レーザダイオード1からの投射光を、シリンドリカルレンズ4によってスリットビームとし、光軸と直行するY軸側が計測対象物90表面で集光するように絞られ、光軸と直行するX軸が表面からの反射光成分を平均化するために引き伸ばされた態様で照射する。計測対象物90の表面からの反射光はレーザダイオード1と共役な位置に配置された開口5aを通してフォトダイオード2で受光する。開口5aは、Y軸が短く且つX軸が長い形状のスリットである。受光信号がピークとなる対物レンズ6の位置から表面の変位を計測する。
(もっと読む)
計測装置

【課題】計測装置において、計測対象物の変位計測または二次元画像の撮像について、より高度な計測を実現する。
【解決手段】コントローラ200では、センサヘッド100の変位計測部に、計測対象物500の高さの計測のためのフォトダイオード2の受光信号を出力させ、これに基づき、計測対象物500の表面の高さを計測する。次に、コントローラ200では、計測対象物500の高さに基づいて、画像取得タイミングを決定する。具体的には、テーブルから、算出された計測対象物500の高さTに対応するピント調整値Pが取得され、そして、当該ピント調整値Pを実現するタイミングで画像取得信号を撮像素子9に送信する。これにより取得された画像より、計測対象物500の高さに基づいて、計測対象物500上の2点間の長さを演算する。
(もっと読む)
外観検査装置
【課題】銀メッキが施されたリードフレーム及びリードフレーム封止体の外観不良を確実で簡易に検出可能であるとともに、リードフレーム及びリードフレーム封止体の検査を兼用可能な外観検査装置を提供する。
【解決手段】所定位置に配置された被検査体に向けて青色の光を照射する青色照明部と、被検査体に対して青色照明部と同じ側に配置され、被検査体の画像を撮像する撮像部と、被検査体に対して青色照明部と同じ側に配置され、被検査体に向けて赤色の光を照射する赤色照明部と、被検査体を挟んで撮像部と対向する位置に配置され、撮像部に向けて光を照射する第3の照明部と、被検査体の画像に基づいて2値化画像を生成するとともに、2値化画像に基づいて被検査体における不良の有無を判定する画像処理手段とを備え、青色照明部、赤色照明部及び第3の照明部の点灯を切換えつつ撮像部が被検査体の画像を撮像する。
(もっと読む)
スポット位置測定方法および計測装置
【課題】光学系を変更することなく、撮像画像内のスポット中心の位置を確認できるようにする。
【解決手段】膜厚サンプル35を、例えば、X方向に位置をずらして、複数の位置でそれぞれ撮像するとともに、各位置でのスポット光に基づいて膜厚をそれぞれ計測し、撮像した画像を処理して、画像の中心Pと膜厚サンプル35の中心P1との中心位置の差を算出し、この中心位置の差に対する膜厚の変化に基づいて、画像の中心Pに対するスポット光のX方向のずれ量を求め、同様に、画像の中心Pに対するスポット光のY方向のずれ量を求める。
(もっと読む)
光学式3次元測定機の検査マスタ用基準部材
【課題】 被測定面に設けられた、光学的に距離を測定する指標となる線状溝の交差位置を容易に見出すことができる光学式3次元測定機の検査マスタ用基準部材を提供する。
【解決手段】 検査マスタのマスタ本体に取り付けられる基準部材9の被測定面9Aを、球体表面に形成された円形の平坦面とし、この被測定面9Aには、その中心付近に3次元測定機から照射された測定光を乱反射させる微細な線状溝Gが被測定面9Aの中心位置Oで互いに交差するように複数設けられているとともに、線状溝よりも幅広のマーカー溝Mが、それぞれの線状溝Gの外側に隣接して被測定面9Aの径方向に放射状に複数設けられている。マーカー溝Mは、測定光を線状溝より強く乱反射するため、測定の指標となる中心位置Oを容易に見出すことできる。
(もっと読む)
校正用データ取得装置およびその方法
【課題】 広い領域のステレオ撮影に必要な複数のカメラを設置する際に、容易にキャリブレーションを実行する技術を提供する。
【解決手段】 所定の空間領域(50)に対して異なる方向から撮影する二台のカメラと、その二台のカメラの撮影タイミングを制御する撮影制御装置と、前記所定の空間領域内を移動可能な被写体(たとえばラジコンヘリコプタ31)とを備える。 前記被写体(30)は、三次元の位置座標を取得可能なGPS装置(32)を搭載し、 前記撮影制御装置は、所定の空間領域(50)内の被写体(30)を前記二台のカメラ(11L,11R)にて撮影して画像データを取得する。
(もっと読む)
非接触形状測定機および測定方法
【課題】駆動機構の発熱、プローブの重量増や大型化などの問題を解消できるとともに、能率的な測定を実現できる非接触形状測定機および測定方法を提供する。
【解決手段】非接触プローブ10と、被測定物W1,W2を載置するXYステージ2と、非接触プローブ10とXYステージ2とを相対移動させる相対移動機構とを備え、非接触プローブ10は、同軸上でかつ互いに離れる方向に測長光L2を出射し、その測長光L2が被測定物W1,W2によって反射した反射光を用いて、被測定物W1,W2までの距離を求める干渉計からなる一組の測長手段11A,11Bを含んで構成されている。
(もっと読む)
形状測定装置,形状測定方法
【課題】薄板状の被測定物の厚み分布の測定において,簡易な装置構成により,被測定物の振動の影響を受けずに高精度で厚み分布の測定を行うことができること。
【解決手段】被測定物1の表裏各面について,レーザ光源2の出射光を2分岐したビーム光をさらに2分岐させて参照面及び表裏相対する測定点1a,1bに反射させ,参照光と物体光とを直交する偏光成分とする非干渉光Pax,Pbxを得て,それを複数に分岐させ,分岐光のうちの1つ以上について波長板a261,a263,a264等で直交する偏光成分の位相差に変化を与えて位相シフトを行い,位相シフト後の分岐光における参照光及び物体光の偏光方向を基準とする共通の偏光成分の抽出により干渉光Qa1〜Qa4,Qb1〜Qb4を得て,それらの強度から前記非干渉光における前記参照光及び前記物体光の偏光成分の位相差を算出し,その位相差の分布から被測定物1の厚み分布を算出する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】生産性を低下させることなく、基板レベルでの測定を行うことのできるリソグラフィ装置の提供。
【解決手段】シングル・ステージ又は複数ステージのリソグラフィ装置において、例えば基板テーブル交換、及び/又は基板のロード及びアンロードの間、テーブルが液体供給システムに対して閉じ込め用の面を形成する。一実施例では、テーブルは、例えば基板テーブル交換、及び/又は基板のロード及びアンロードの間に投影ビームの測定を行うセンサを有している。
(もっと読む)
ロボットビジョンシステムおよび自動キャリブレーション方法
【課題】キャリブレーション作業を自動で手間をかけることなく行なうことを可能としたロボットビジョンシステムを提供することである。
【解決手段】提案するロボットビジョンシステムは、第1および第2のカメラにより構成されるステレオカメラ1と、アームを有するロボット4と、ステレオカメラ1およびロボット4を駆動し制御する制御装置2と、ステレオカメラ1の基礎行列算出に用いる基礎行列算出用冶具3をロボット4のアーム先端部に固定する機構と、を有する。
(もっと読む)
面画像生成装置
【課題】簡易な構成で、検査対象物の面の状態を表わす画像を生成することができるようにする。
【解決手段】駆動部12によって、水平面上で板状の検査対象物を移動させる。また、レーザ照射部14によって、検査対象物の移動方向と直交するする方向を長さ方向とするレーザスリット光を、検査対象物に対して照射し、エリアカメラ18によって、検査対象物からのレーザスリット光の反射光を含む領域を撮像する。画像処理部32によって、複数の撮像画像の各々から、反射光を表わす画素ラインを抽出し、画素ラインの抽出結果の各々を撮像順に並べて合成することにより、検査対象物の面状態を表わすプレーン画像を生成する。
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
変位測定装置及び変位測定方法
【課題】
高精度な変位測定装置を提供する。
【解決手段】
被測定物1の変位量を測定する変位測定装置100であって、ベース2までの距離に基づいて第一の原点位置を検出する測距センサー5と、被測定物1までの距離に基づいて第二の原点位置を検出する測距センサー6と、測距センサー5、6を搭載して測距センサー5、6の測距方向に移動するステージ4と、測距センサー5、6を移動させて検出された第一の原点位置及び第二の原点位置を利用して、ベース2に対する被測定物1の変位量を測定するコントローラ7とを有する。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの3軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】ボルト12の一端に配設した検出体34の3次元座標をステレオカメラ33で計測することにより、ボルト12の中心Kの位置座標O及びボルト12の姿勢角を算出するカメラ計測工程と、ボルト12の一端に配設した加速度ピックアップ31で計測したボルト12の3軸加速度を二階積分することにより、ボルト12の3軸変位量を算出する加速度検出具計測工程と、ボルト12の姿勢角に基づいてボルト12の3軸変位量をカメラ座標系における変位量に変換する変位量変換工程と、ボルト12の中心Kの位置座標Oに基づいて加速度検出具計測工程において行う二階積分の初期値を修正する座標修正工程とを備える。
(もっと読む)
非接触形状計測装置及び非接触形状計測方法
【課題】非測定物の見かけの形状をできるだけ歪ませることなく形状計測できると共に、長い物や連続的に移動する物であっても形状計測できる非接触形状計測装置を提供する。
【解決手段】非接触形状計測装置は、被測定物に対して、一方向に沿って光強度が周期的に変化する複数の位相パターンから一つの位相パターンを選択して位相シフトさせながら、前記選択した位相パターンを有する光を照射する照明装置と、選択した前記位相パターンごとに、前記被測定物からの光を画像信号として、前記一方向に垂直な方向に沿った1ラインごとに取り込むラインセンサカメラと、選択した前記位相パターンごとに得られた前記画像信号に基づいて、前記被測定物の各箇所の位相を算出し、前記位相に基づいて前記被測定物の各箇所の高低差を算出する演算部と、を備える。
(もっと読む)
ウェーハを検査するためのシステム及び方法
【課題】 半導体ウェーハを検査するための検査システム。
【解決手段】 この検査システムは、広帯域照明を供給するための照明設定を備える。広帯域照明は、異なるコントラスト、例えば明視野および暗視野広帯域照明であることができる。検査システムは、第1の画像収集装置および第2の画像収集装置を更に備え、半導体ウェーハが動く間、各々が半導体ウェーハの画像を収集するために広帯域照明を受け取るために構成される。システムは、広帯域照明の平行を可能にするための複数のチューブレンズを備える。システムはさらに、安定化メカニズムおよび対物レンズ組立体を備える。システムは、細線照明エミッタ、および半導体ウェーハの3次元画像をそれによって収集するために細線照明を受け取るための第3の画像収集装置を更に備える。システムは、第3の画像収集装置が、複数の方向に半導体ウェーハから反射される照明を受け取ることを可能にするための反射器組立体を備える。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
キャリア形状測定機
【課題】キャリアおよびキャリアに収容された半導体ウエハの姿勢を精度良く測定することのできる形状測定機を提供する。
【解決手段】測定対象であるキャリア18を支持するステージ12,20と、測定対象の形状を測定する測定部10とを有する。ステージ12,20は、キネマティックカップリングによって測定対象を支持するために、キネマティックカップリングピン20a,20b,20cを有する。
(もっと読む)
単一映像を利用した姿勢角センサー三次元誤整列補正方法
【課題】飛行体に装着された映像獲得カメラで撮影された単一映像情報から地上制御点を計算して姿勢角センサーの三次元誤整列情報を定量的に抽出して補正する単一映像を利用した姿勢角センサー三次元誤整列補正方法に関する。
【解決手段】地上制御点基準ベクターの計算段階と、映像情報を利用した地上制御点観測ベクターの計算段階と、計算された前記地上制御点基準ベクターと前記地上制御点観測ベクターを利用した姿勢誤差行列計算段階と、前記姿勢誤差行列計算値を利用した姿勢角センサー誤整列の補正段階とを含んで成り立つ。
(もっと読む)
印刷はんだ検査装置
【課題】プリント板の各点から得られる正反射光及び散乱反射光の2次元の光量分布を基に、はんだ箇所の高さを算出するときの基準位置を容易に求める技術を提供する。
【解決手段】基板1に垂直に近赤外光を照射し散乱反射光を受け、かつ斜めの角度で近赤外光を照射しその正反射光を受ける変位センサ2を備え、度数算出手段4は、散乱反射光量と正反射光量とを2次元とするヒストグラムを生成する。パラメータ決定手段5は、ヒストグラム上で散乱反射光量及び正反射光量が高い側においてほぼピークとなる度数分布を有する基準分布を選定し、基準分布の裾付近の2次元の範囲をパラメータとして決定する。測定検査部100は散乱反射光量及び正反射光量がパラメータの範囲内にある基板上の位置であって、はんだの高さを求めようとするはんだ箇所に近い位置を基準位置として、はんだの高さを求める。
(もっと読む)
201 - 220 / 715
[ Back to top ]