
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
141 - 160 / 715
障害物検出装置
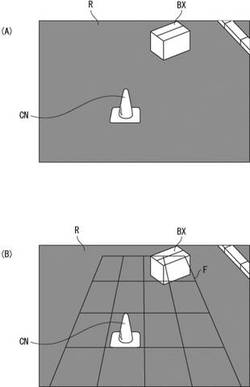
【課題】障害物と判定できる対象の多様性を確保しつつ、路面等の対象の変化に対して誤判定を生じにくくする。
【解決手段】障害物検出装置は、カメラで撮影した路面Rの入力画像(カラー静止画像)をフレームFに則して複数の領域に分割し、これら分割領域毎に入力ファクターとして平均輝度や平均彩度を抽出する。そして、入力ファクターに基づいて基準空間における距離を演算し、この距離が閾値を超える場合に障害物があると判定する。
(もっと読む)
トンネルデータ処理システムおよびトンネルデータ処理方法

【課題】 GPSが利用できないトンネル内において、距離メータなどの機械的計測により得た入力データに対してGPSや距離メータ等に起因する誤差を正確に補正する。
【解決手段】 走行する車両に搭載された距離メータやジャイロ装置などの位置検知手段210により測定した原座標系の位置データと、車両に搭載された壁面検知手段120により位置データと同期させた原座標系のトンネル内面点群データをデータ入力部120を介して入力する。入口被検知板310に関するGPSでの計測データと既知の位置データの差分からGPSの誤差を補正し、出口被検知板320に関する距離メータの計測データと既知の位置データの差分からトンネル内で距離メータの誤差により蓄積したトンネル内計測誤差の総計を算出し、キロポスト上の任意の点に対してはトンネル内計測誤差を按分して補正する。
(もっと読む)
障害物検知装置
【課題】障害物に明部と暗部が存在し、障害物の連続する輪郭が明部と暗部にまたがって存在する場合でも誤検知の少ない安定した障害物検知を可能とする障害物検知装置を提供する。
【解決手段】撮像画像から障害物検知のための処理画像を生成する処理画像生成部と、処理画像を複数の小領域に分割する小領域分割部と、複数の小領域と処理画像の画素値から小領域毎のエッジ閾値を設定するエッジ閾値設定部と、複数の小領域と処理画像から小領域毎の濃淡勾配値を算出し、算出された濃淡勾配値に対応する小領域のエッジ閾値を用いて、エッジ画像と勾配方向画像とを生成するエッジ抽出部と、エッジ画像内で設定されたマッチング判定領域内のエッジ画像及びエッジ画像に対応する勾配方向画像から障害物の有無を判定する障害物認識部と、を有し、小領域分割部は、自車外の照明状態に基づいて処理画像を複数の小領域に分割する障害物検知装置。
(もっと読む)
三次元測定システムおよび三次元測定方法
【課題】三次元形状を測定する三次元測定の作業性を改善できる技術を提供する。
【解決手段】複数の識別点が設けられた対象物の三次元形状のうち第1領域に第1検出光および第2検出光を時間的に順次に投光する検出光投光手段と、検出光投光手段からの投光によって照明された第1領域の画像を撮影する画像撮影手段と、第1検出光が投光されたときの画像に基づいて第1領域の三次元形状を表現した三次元形状データを取得する形状取得手段と、第2検出光が投光されたときの前記画像に基づいて第1領域に設けられた複数の着目識別点のそれぞれの位置を表現した第1位置データを取得する位置取得手段と、前記第1位置データに基づいて、前記複数の着目識別点のそれぞれの位置を示す第1位置指示光を前記対象物に向けて投光する指示光投光手段を備える。
(もっと読む)
高速高解像度三次元太陽電池検査システム
光学検査システム及び方法が提供される。加工対象物輸送機構が加工対象物(12)をノンストップで移動させる。照明装置(40)が、ライトパイプを含み、第一及び第二のストロボ照明野タイプを提供するように構成されている。第一(3)及び第二(5)のカメラ(2)アレイが、加工対象物(12)の立体画像化を提供するために配設されている。第一のカメラアレイ(3)は、第一の照明野を用いて加工対象物(12)の第一の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第二の複数の画像を生成するように構成されている。第二のカメラアレイ(5)は、第一の照明野を用いて加工対象物(12)の第三の複数の画像を生成し、第二の照明野を用いて加工対象物(12)の第四の複数の画像を生成するように構成されている。処理装置が、第一、第二、第三及び第四の複数の画像の少なくともいくつかを記憶し、他の装置に提供する。 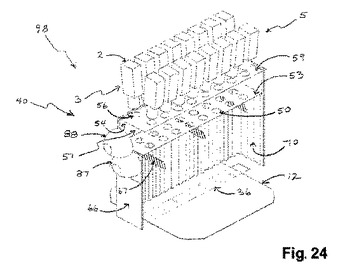 (もっと読む)
(もっと読む)
携帯端末
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
物体の自動認識方法及び物体の自動認識装置
【課題】処理が複雑になることなく、超音波を用いてあらゆる材質の物体の距離計測と形状認識とを正確に行うことが可能な物体の自動認識方法及び物体の自動認識装置を提供する。
【解決手段】特定の空間を撮像してイメージ画像を取得する画像取得工程と、イメージ画像に基づいて、そのイメージ画像に写る輪郭を囲んだ小領域にて分割された輪郭画像を作成する画像処理工程と、前記空間に超音波を送信する超音波送信工程と、前記超音波が反射して生成された反射波を受信する超音波受信工程と、前記反射波の受信信号を測定して、この受信信号の強度に基づいて、空間の物体の存在及び距離を表示する受信信号分布画像を作成する受信信号測定工程と、前記輪郭画像と受信信号分布画像とを重合わせる重合わせ工程と、前記重合わせにより、前記輪郭画像において、受信信号が重なる小領域を物体の輪郭であると特定する物体特定工程とを備えた。
(もっと読む)
非接触物体検査
物体のエリアのトポグラフィを、物体上に投影されたパターンの位相の解析を介して検査する非接触方法である。その方法は、第1のパースペクティブから獲得された、光学的パターンが投影される物体の第1の画像を取得するステップと、第2のパースペクティブから獲得された、光学的パターンが投影される物体の第2の画像を取得するステップであって、第2の画像内の物体上に当たるときの光学的パターンは、第1の画像内の光学的パターンとは異なる、ステップとを含む。その方法は、第1の画像内に映し出された光学的パターンの少なくとも1つの領域の位相に関する位相データに基づいて、物体の少なくとも1つの領域のトポグラフィを記述するデータを決定するステップをさらに含む。第2の画像内に映し出された物体の対応する領域から獲得した位相データは、第1の画像から獲得した位相データまたはトポグラフィデータのあらゆる曖昧性を解決するために使用される。
 (もっと読む)
(もっと読む)
乗員移動量算出装置
【課題】 ウエビングの引き出し量検出手段および撮像手段を併用することで、種々の状況において乗員の頭部の位置を低コストで精度良く検出可能にする。
【解決手段】 シートベルト装置のウエビングの引き出し量の単位時間あたりの変化率である引き出し速度が所定値未満の場合は、撮像手段で撮像した乗員の映像の位置変化に基づいて頭部の移動量を算出するので(モード3)、乗員の体格の影響を受けずに頭部の移動量を精度良く算出することができ、しかも撮像の時間間隔が長くても算出精度が低下しないのでコストを低く抑えることができる。またウエビングの引き出し速度が所定値以上であって、撮像の時間間隔を短くしないと移動量の算出精度を維持できない場合は、ウエビングの引き出し量に基づいて頭部の移動量を算出するので(モード1およびモード2)、撮像の時間間隔が短い高コストの撮像手段を必要とせずに、ウエビングの引き出し量に基づいて頭部の移動量を精度良く算出することができる。
(もっと読む)
ロボットの制御装置及びロボットのティーチング方法
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
樹脂被覆管の管端連結位置検出装置および方法
【課題】連結部の段差の発生による検出位置の誤差を補正可能な管端連結部検出装置の提供。
【解決手段】樹脂被覆後の管端連結部4を渦電流を用いて検出する渦流検出器1と、管端連結部4前後に発生する管端の段差量5を計測する段差量計測器2と、前記段差量5の計測結果が一定量以上の場合にのみ前記管端連結部4の検出位置信号に補正を加える補正演算器8とを有する、樹脂被覆管3の管端連結位置検出装置とした。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
測定装置
【課題】測定に要する時間の増加を招くことなく、被測定物の測定対象に対する光学的な設定の異なる複数の測定データを得ることのできる測定装置を提供する。
【解決手段】撮像素子17からのライン反射光Rlの取得データに基づいて被測定物の表面形状を計測する測定装置10である。ライン反射光Rlを撮像素子17の受光面に結像させる複数の結像光学系(33、34)と、ライン反射光Rlを分岐して各結像光学系へと導く光束分岐機構32とを備え、各結像光学系は、被測定物の測定対象に対する光学的な設定が互いに異なるものとされ、撮像素子17は、受光面上において複数のセグメントが設定されているとともに各セグメントが複数の領域に区画され、各セグメントにおける少なくとも1つ以上の領域を受光領域とし、各結像光学系は、分岐されたライン反射光Rlを撮像素子17の受光面において互いに異なるセグメントの受光領域へと結像させる。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】被加工物の上面高さを計測する計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】被加工物Wに向けて白色光を発光する白色光源61と、発光した光が有する各波長を回折する回折手段62と、回折された光の中央部を遮蔽して光を環状に形成するマスク手段63と、形成された環状の光の像をリレーするリレーレンズ64と、伝達された環状の光を集光して被加工物に照射する対物レンズ65と、マスク63手段とリレーレンズ64との間に配設され被加工物に照射された光の反射光を分光するビームスプリッター66と、分光された反射光における光軸を通る波長の反射光を通過させる光分別手段67と、通過した反射光を回折光に変換する回折格子68と、回折された回折光の波長を検出する波長検出手段69と、波長検出手段69からの波長信号に基いて被加工物Wの高さ位置を求める制御手段とを具備している。
(もっと読む)
3次元計測装置
【課題】装置構成の簡略化と低コスト化とを実現する。
【解決手段】3次元計測装置10は、被測定物105が載置された測定ステージ104と、複数の基準点を有する基準スケール部材101と、撮像部102と、駆動機構103と、高輝度検出部110と、3次元測定部111とを有する。撮像部102は、被測定物105の光学像と基準スケール部材101の複数の基準点の光学像とを同一視野で撮像する。高輝度検出部110は、駆動機構103が撮像部102を相対移動させる駆動期間内に撮像部102によって連続的に撮像された複数の画像から、撮像部102のN個の相対移動位置の各々に対して被測定物105の最大輝度部分を検出するとともに複数の基準点のうち最大輝度を示す基準点を検出する。3次元測定部111は、相対移動位置ごとに、前記最大輝度部分の高さを当該検出された基準点に対応付けられた高さに設定する。
(もっと読む)
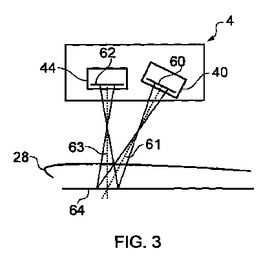
傾斜センサ、それを備えた加工装置及びワーク加工方法
【課題】測定面の傾斜量を高精度に測定する。
【解決手段】光源1より測定面2へ照明光20を照射し、その反射光を回折格子8に入射させる。回折格子8より生じる±1次の回折光22は光学ユニット3の一対の回折格子9に入射し、測定面2の傾斜量に応じた光路差を持つ2つの回折光23を生じる。各回折光23を集光光学素子10により受光素子4に集光させると、上記光路差により干渉光を生じる。この干渉光の強度変化を測定することで上記光路差を求めて、測定面2の傾斜量を計算する。
(もっと読む)
プロジェクター式測定装置
【課題】比較的大きな被測定物に対しても高精度な測定が可能となるプロジェクター式測定装置を提供すること。
【解決手段】プロジェクター式測定装置1は、載置台10と、照明部16と、被測定物5を画像として所定倍率で光学的に取得する画像取得部21と、画像取得部21から出力される取得画像データに基づいて投写画像データとして出力して制御する画像制御部31と、光源から射出される光束を、投写画像データに基づいて光変調素子により変調し、投写用光学像に変換して出力する光学変換部51と、投写用光学像を所定倍率で投写する投写光学部52と、投写用光学像が投写されて投写画像を形成すると共に、所定倍率で作成された基本形状図シート6を載置するスクリーン40と、投写画像と基本形状図シート6との変位を変位データとして取得する変位取得部36と、変位データに基づいて変位量を算出する変位量算出部37と、を備える。
(もっと読む)
単一カメラ及び運動センサーによる3次元情報抽出
【課題】単一のカメラを使用して被写体の3次元情報を提供する。
【解決手段】二つの異なるカメラ位置から、少なくとも一つの被写体の写真を撮影する。カメラに連結される運動測定装置は、ある地点から他の地点へ移動した際のカメラの直線位置の変化及び角度方向の変化を測定し、測定して得られた情報から、被写体の3次元情報を導き出す。また、ある実施形態においては、写真の画像から被写体の3次元情報を導き出す。
(もっと読む)
形状測定装置
【課題】より正確かつ確実に形状測定装置の校正を行う。
【解決手段】俯瞰カメラ、光切断プローブ、および、接触式プローブを用いて被検物の形状を測定する形状測定装置のステージの上面には、校正用のゲージ21が設けられている。ゲージ21は、形状測定装置の校正に用いる凹球面状の凹部51と、凹部51を構成する凹球面の中心を含む所定の範囲に入射する光を遮光する遮光部材52により構成される。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
位置検出装置、位置検出方法および基板重ね合わせ装置
【課題】互いのウェハを位置合わせして重ね合わせるときに、ステージの回転量が所定量を超えてしまうと、ステージの正確な位置を把握することが困難となる。ステージの回転量が所定量を超えないように制御するには、そもそも最初にステージに置かれるウェハの位置を厳密に管理する必要がある。
【解決手段】位置検出装置は、第1基板に設けられた少なくとも2個の第1基板指標を一度の撮像動作により撮像する第1撮像ユニットと、第1撮像ユニットにより撮像された画像に基づいて第1基板指標の位置を計測することにより、第1基板の姿勢を測定する測定部とを備える。
(もっと読む)
141 - 160 / 715
[ Back to top ]