
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
81 - 100 / 715
基板の粗さを得る方法、及び基板の粗さを得るための装置
【課題】基板の粗さを得る方法、及び基板の粗さを得るための装置において、ウェハ加工途中の微細な凹凸のパターンを有するパターン付きウェハの表面粗さを測定することを可能にすることで、ウェハ間の膜厚や膜質のばらつきによる歩留まりを向上させることを目的とする。
【解決手段】基板に形成されたパターンに関する設計情報を得る第1のステップと、前記設計情報を用いて、前記基板の表面粗さを得ることができる表面粗さ測定領域を得る第2のステップとを有する基板の粗さを得る方法、及び基板の粗さを得るための装置である。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法

【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
形状測定装置
【課題】精度の高い測定結果を得る。
【解決手段】広帯域スペクトルを有する光源からの光を被測定対象と参照面とに導きその光路長差により干渉光強度分布画像を生成する光学系と、干渉光強度分布画像を撮像する撮像手段と、光路長差を変化させる光路長差変更手段と、干渉光強度分布画像から各測定位置における光軸方向の位置を求める演算手段とを備える。演算手段は、複数の信号発生手段と、その出力信号に重み付けをして出力する重み付け手段と、周期信号を加算して検出信号として出力する第1の信号加算手段と、直流信号と検出信号とを加算する第2の信号加算手段と、干渉強度列から第2の信号加算手段の出力を減算して誤差信号を出力する信号減算手段と、誤差信号から重み付け手段の重みを調整する適応アルゴリズム部とを有する適応信号処理ブロックと、検出信号のピーク位置を検出するピーク検出ブロックとを有する。
(もっと読む)
画像計測方法及び画像計測装置
【課題】簡単な作業で、大型構造物の計測ができる画像計測方法及び画像計測装置を提供する。
【解決手段】計測対象物である圧力容器100をカメラ2で撮像して撮像画像を取得し、その撮像画像をカメラパラメータに基づいて補正し、補正した計測用画像から計測対象であるボルト孔101と同一平面上に存在する基準円150を抽出し、その基準円150からカメラ2の撮像位置を推定し、上記計測用画像から2つのボルト孔101を検出して、この検出した情報と撮像位置の情報に基づいて、2つのボルト孔101間の距離を算出する。
(もっと読む)
廃棄物処分場における廃棄物の管理システム
【課題】廃棄物処分場に埋め立て処分された廃棄物を、どの位置に、どのような種類の廃棄物があるのかを容易に把握し、再利用を容易にする。
【解決手段】廃棄物処分場45に搬入された廃棄物の種類を含む廃棄物情報を取得する廃棄物情報取得部と、前記取得した廃棄物情報を記憶する廃棄物情報記憶部と、前記搬入された廃棄物が、前記廃棄物処分場内に投入された箇所の平面的な位置情報及び高さ情報を含む投入位置情報を取得する投入位置情報取得部と、前記取得した投入位置情報を、該当する廃棄物の廃棄物情報に関連付けて前記廃棄物情報記憶部に記憶する位置情報記憶部とを備える。
(もっと読む)
情報処理装置及びその制御方法、プログラム
【課題】 自己オクルージョンが存在する環境においても、複数の撮影画像を用いて3次元空間内の対象物体の位置姿勢を高精度かつ安定的に推定するための技術を提供する。
【解決手段】 3次元空間内の対象物体の位置姿勢を推定する情報処理装置であって、複数の撮影位置から対象物体を撮影して得られた複数の撮影画像を入力する入力手段と、入力された複数の撮影画像の各々から、3次元空間内の所定の部分空間が占める領域に対応する部分画像を切り出す切出手段と、複数の撮影画像からそれぞれ切り出された複数の部分画像の特徴を示す特徴情報を、当該複数の部分画像から抽出する抽出手段と、物体の位置姿勢と、当該位置姿勢に対応する当該物体の特徴情報とを関連づけて示す辞書情報を記憶する記憶手段と、抽出手段が抽出した対象物体の特徴情報と、辞書情報に示される特徴情報とを比較して、該対象物体の位置姿勢を推定する推定手段とを備える。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
鏡面検査方法及びその装置
【課題】
鏡面検査装置において,高感度にかつ定量的に表面の凹凸を検出することが,困難であった。
【解決手段】
光源から発射された照明光を略平行光にして鏡面状の表面を有する試料に照射し、照明光が照射された試料からの反射光を集光レンズで集光し、集光レンズで集光した試料からの反射光をピンホールを通過させて反射光以外の光を遮光し、ピンホールを通過した試料からの反射光を集光レンズの焦点位置からずれた位置に配置された検出器で検出し、検出器で検出した信号を処理する鏡面検査方法において、検出器はピンホールを通過した試料からの反射光を異なる複数の条件で検出し、検出器で異なる複数の条件で検出した反射光の検出信号を用いて試料上の局所的な凹凸度の分布を検出するようにした。
(もっと読む)
シートに塗工された塗工パターンの形状測定方法及び装置
【課題】塗工パターンの幅方向および搬送方向の測定の同時性を実現し、光軸方向の距離変動の影響も無くすことができる塗工パターンの測定方法及び装置を提供する。
【解決手段】 シートに塗工された塗工パターンの形状測定方法において、
1)シートの搬送方向に直交して水平ラインの撮影方向に複数のカメラを並べ、前記シートを前記複数のカメラで撮影する工程、
2)撮影した映像の水平走査信号または垂直走査信号の少なくとも一方を水平走査に同期させ前記複数のカメラの水平走査信号を順次切り替えて画像処理手段に取り込む工程を含んでいる。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
ランドマーク検知方法、ロボット及びプログラム
【課題】ランドマーク検知方法、ロボット及びプログラムにおいて、ランドマークの検知精度を向上させることを目的とする。
【解決手段】自律走行型ロボットからランドマークを検知するランドマーク検知方法において、ロボット内でカメラが出力する撮像画像に基づいてランドマークの特徴点の特徴ベクトルを生成し、前記特徴ベクトルとランドマーク登録時の特徴点の特徴ベクトルとに基づいてマハラノビス距離を計算し、前記マハラノビス距離が最小の特徴ベクトルを選択してランドマークの検知結果とし、ロボットの移動量と正規分布誤差に基づいてロボットの現在位置の候補を求め、前記ロボットの現在位置の候補について、登録されているランドマークの位置との整合性を評価して評価結果を出力し、前記ロボット位置の候補の座標に前記評価結果に応じて重み付け平均を計算してロボットの推定位置を得るように構成する。
(もっと読む)
帯状部材の外観形状検査方向及びその装置
【課題】帯状部材の外観形状が帯状部材の長さ方向にどのように変化しているかを知ることのできる帯状部材の外観形状検査方法及びその装置を提供する。
【解決手段】この帯状部材の外観形状検査装置は、検出された二次元輪郭データを帯状部材の長さ方向に並べて検査用データを作成し、該検査用データから、各二次元輪郭データが示す帯状部材の外観形状の輪郭が帯状部材の長さ方向にどの様に変化するかを示す帯状部材の外観形状の特徴データを抽出する。このため、検査用データから抽出された前記各特徴データは帯状部材の厚さや、帯状部材の幅方向端部位置等が、帯状部材の長さ方向にどの様に変化するかを示すことになるので、帯状部材の外観形状が帯状部材の長さ方向にどの様に変化しているかを知ることができ、タイヤ特性の向上を図る上で極めて有利である。
(もっと読む)
位置センサ及びリソグラフィ装置
【課題】コンパクトなユニット内に組み込むことができ、複数の自由度の位置測定値を提供できる位置センサを提供する。
【解決手段】位置センサは、ターゲットの位置データを測定するように構成される。位置センサは、放射ビームを照射するように構成された放射源と、放射ビームを第1の回折方向に少なくとも1つの1次放射ビームに回折するように構成された第1の格子と、1次回折ビームの光路内に配置され、第1の格子で回折された1次回折ビームを、第1の回折方向に実質的に垂直な第2の回折方向に回折するように構成された第2の格子とを含む。第2の格子はターゲットに接続される。第1の検出器は、第1の格子によって回折されたビームの少なくとも一部を検出するように構成され、少なくとも1つの第2の検出器は第1の格子と第2の格子によって回折されたビームの少なくとも一部を検出するように構成される。
(もっと読む)
基板検査装置
【課題】オフセット量を正確かつ容易に取得する。
【解決手段】第1の位置情報に基づいて特定される位置Ob上にビーム照射部が位置するように移動させた後に、照射部をX方向(矢印A1,A2の向き)に移動させながらレーザービームを照射させたときのレーザービームの反射光量の変化、およびY方向(矢印B1,B2の向き)に移動させながら照射させたときの反射光量の変化に基づいてマーク21の位置Mx1,Mx2,My1,My2を取得すると共に、位置Mx1,Mx2,My1,My2と、第2の位置情報とに基づいて基板保持機構によって保持されているオフセット量取得用基板におけるマーク21の位置Mbを特定し、位置Mb,ObのX方向に沿った位置ずれ量Xb、およびY方向に沿った位置ずれ量Ybを、照射部のX方向に沿った移動量、およびY方向に沿った移動量をそれぞれ補正するためのオフセット量として特定する。
(もっと読む)
構造物変位量測定方法
【課題】画像式測定方法であっても、動的測定や1mm以下の微小変位を離れた位置からの完全非接触測定を可能とし、測定精度の推定を可能にする構造物変位量測定方法を提供する。
【解決手段】動的撮影を行い、基準画像と測定画像とを比較、画素変位量を算出し、撮影距離と撮影角度の情報をもとに、画素数で表わされた変位量を実スケールの単位に変換し、変位量を算出する。あわせ実測定誤差も算出する。現地の条件により、測定誤差が大きい場合には、撮影条件を変更する。大気揺らぎの影響を軽減するために、撮影距離の制約を導入、夜間撮影による測定を可能にする。また、測定データに大気揺らぎの影響がある場合、フィルタ処理などによる軽減を可能とする。
(もっと読む)
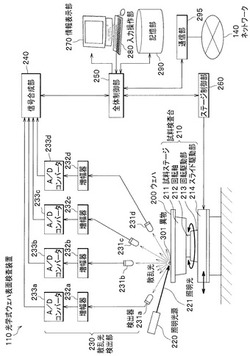
走査型プローブ顕微鏡の変位検出方法
【課題】 測定対象が変わっても測定対象の反射率などの光学特性、あるいは形状や機械的特性に依存せずに検出感度やノイズの割合が調整可能で、測定対象への照射光による測定対象の熱変形の影響が小さくでき、最適な条件下で測定精度を確保することが可能な光学式変位検出方法を提供する。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の増幅率で増幅する増幅器22から構成される光学式変位検出機構において、光強度調整器28と増幅率調整器27を設けカンチレバー6への照射光強度や光検出器16の増幅率を調整できるようにした。
(もっと読む)
道路検査方法及び道路検査車両
【課題】道路に関連する複数の構造物及び設備について、検査の効率化を図ることができる検査方法及び道路検査車両を提供すること。
【解決手段】検査車両1は、車両本体2に、熱赤外線カメラ3及び可視光線カメラ4と、振動センサ5と、走行音検出部6と、透水性検出部7と、ICタグ通信部8と、舗装面計測部9と、GPSアンテナ10と、制御装置11を備える。検査車両1は、道路を走行しながら、熱赤外線カメラ3及び可視光線カメラ4で舗装面を撮影し、舗装面の状態に応じた車両の振動を振動センサ5で検出し、走行音検出部6で車両の走行に伴って生じる音を検出し、透水性検出部7で舗装の透水性を検出し、予め道路の周辺に配置されたセンサの検出情報をICタグ通信部8で収集し、舗装面の形状を舗装面計測部9で収集する。収集された検査情報は、GPSアンテナ10で受信された位置情報が付与されて記憶装置12に記憶される。
(もっと読む)
81 - 100 / 715
[ Back to top ]