
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
41 - 60 / 715
露光装置、露光方法、及び表示用パネル基板の製造方法
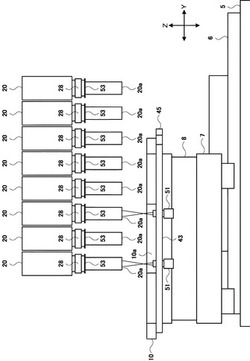
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
変位検出装置

【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
位置座標対応テーブル作成システム及び位置座標対応テーブル作成方法
【課題】車両に搭載された車載装置にて取得される車両の世界座標系と路側装置にて取得される車両のカメラ座標系との対応テーブルを作成する処理の効率化を図る。
【解決手段】車両の世界座標系の位置座標データを取得するとともに、光源/熱源を、その間隔が不均等となるパターンで間欠出力する車載装置20と、車両を撮影する路側装置10と、車載装置20における光源/熱源の出力タイミング情報と、路側装置10にて撮影された画像に含まれる光源/熱源の出力タイミングとに基づいて、車両の世界座標系の位置座標データと車両のカメラ座標系の位置座標データとを時刻同期させ、車両についての世界座標系の位置座標データとカメラ系座標の位置座標データとの対応テーブルを作成する位置対応テーブル作成部30とを有する。
(もっと読む)
共焦点変位センサ
【課題】より簡単かつ安価に振動部を作製することが可能な共焦点変位センサを得る。
【解決手段】共焦点変位センサにおける振動部40は、固定体46と、一端41A側の側面41Sが固定体46に固着され、他端41B側に設けられた第1レンズ31を光軸に沿うように往復移動させる第1振動子41と、一端42A側の側面42Sが固定体46に固着される第2振動子42と、を含み、固定体46、第1振動子41、および第2振動子42は、平板状の部材からそれぞれ形成される。
(もっと読む)
分光特性測定装置、その制御方法、及び分光特性測定方法、並びに分光特性測定装置の光路長差伸縮機構
【課題】外乱による信頼性の低下を抑えた分光特性測定装置とその制御方法、分光特性測定方法、及び光路長差伸縮機構を提供する。
【解決手段】本発明は、被測定物の測定点から多様な方向に向かって発せられた光を一つにまとめた後、分割光学系によって第1反射部と第2反射部に導き、前記第1反射部と前記第2反射部の相対位置に影響を及ぼす外乱を推定し、該外乱を解消するように前記第1反射部と前記第2反射部の少なくとも一方を移動させることにより前記第1反射部によって反射された第1反射光と前記第2反射部によって反射された第2反射光の光路長差を伸縮させつつ、前記第1反射光と前記第2反射光を結像光学系によって同一点に導き、その点の干渉光強度変化に基づき前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
熱間長尺材の長さ測定方法および装置
【課題】熱間圧延後の長尺材がその長さ方向に搬送されつつある時に、その長さを精度良く、しかも安価に、測定することができる、熱間長尺材の長さ測定方法および装置を提供する。
【解決手段】後端センサとしてのロードセル10から搬送ライン下流側に順次所定のセンサ配置間隔で複数のアナログHMD121、122‥‥12nを配置し、最上流側のアナログHMD121を用いて先端検出用の閾値を決定し、該決定した閾値を下流側のアナログHMD122‥‥12nに設定してこれらを先端センサとして用いる。長尺材(鋼管)1の長さは、後端センサ(ロードセル)での後端検出時刻と、その直前に先端検出した先端センサ(アナログHMD)での先端検出時刻と、センサ配置間隔とから算出される。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
検測方法及び装置
【課題】腕金以外の他の物体を誤検知することなく腕金だけを走行的に安全に検知する。
【解決手段】検測装置は、検測車に搭載された測長センサ手段を用いて電気供給用サードレールの保護板の上面に光を照射し、保護板から反射する反射光を受光することによって保護板上面における変位量を検出し、測長センサ手段によって検出された保護板上面における変位量に基づいて保護板の取付け金具である腕金の位置を検出する。防護板には腕金以外に取付けボルト等の構造物がある。この発明ではレーザ光を用いた測長センサ手段を用いて防護板上面における変位量を検出し、腕金の存在及びその位置を検出する。測長センサ手段によって検出された変位量が保護板上面から腕金の上部までの高さに対応し、その検出幅が腕金の板厚に対応するので、これらの値を腕金の高さ及び幅を示す基準値と比較して腕金のみを検出する。
(もっと読む)
路面平坦性測定装置
【課題】高速道路や普通の道路等の路面を走る自動車に、通常の走行速度で走行させつつ路面の平坦性が測定できるようにした路面平坦性測定装置を提供する。
【解決手段】本発明の路面平坦性測定装置は、自動車の走行方向に沿った3個所に、それぞれ路面までの高さを測定するレーザ測距器を備え、該レーザ測距器のうち、前後2つの測距値を結んだ基準線に対する中間の1つの測距値の変動により路面の形状を測定することを特徴とし、自動車を通常の走行速度で走らせながら路面の平坦性を測定でき、しかも、車上や車内にパソコン等のデータ処理ユニット及びその付属機器を搭載でき、測定する路面上の距離に限界がなく、測定が短時間で済み、時間と労力が大いに節約できるようにしている。また、各レーザ測距器はトラックの荷台下の空間に設置し、機器類を荷台上に搭載できるようにし、自動車の車輪を距離測定エンコーダに利用できるようにしている。
(もっと読む)
点検装置および点検方法
【課題】 ケーブルの周りを一周にわたって簡単に、かつ短時間で点検できる装置を提供する。
【解決手段】 この装置は、ケーブル21が通される通路を有するフレーム部材11と、フレーム部材11の長手方向の両端に形成され通路に連続する開口10の中心に向けて突出するように設けられ、通路を通されたケーブル21の外表面に当接して、フレーム部材11をケーブル21に支持するとともに、フレーム部材11をケーブル21の長さ方向へ移動させることが可能な走行支持手段12と、フレーム部材11に、ケーブル21と周方向に対向して取り付けられる複数の撮影手段14とを含む。
(もっと読む)
欠陥検出装置及び欠陥検出方法
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
シャフトの変形を測定するための装置及び方法
【課題】 シャフトの変形を測定するための装置及び方法を提供する。
【解決手段】 デバイスによってシャフト2の変形を測定するための方法が、変形が加えられる前に、シャフト2に付加されたパターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第1基準位置を検出するステップとから成り、変形が加えられた後に、パターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第2基準位置を検出するステップとから成る。これにより、第1基準位置と第2基準位置との間の距離に基づいて、シャフトの円周方向の変形及び/又はトルクが求められる。
(もっと読む)
画像処理方法、画像処理装置およびそれを搭載した水中検査装置
【課題】画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上する画像処理方法,画像処理装置およびそれを搭載した水中検査装置を提供する。
【解決手段】移動体に搭載した撮影手段により被写体を連続的に撮影して撮影画像を取得し、連続して得られた2つの画像に共通に撮影されている被写体の要素を特徴量に定め、連続して得られた2つの画像に対して画像相関処理を行って特徴量の一致度を判断し、所定以上の一致度が得られない場合には新たな被写体の要素を特徴量に定め、連続して得られた撮影画像における特徴量の位置を、二次元の撮影画像の一方方向の所定位置に固定し、二次元の撮影画像の他方向の変化量を前記撮影手段の移動量とする。
(もっと読む)
画像プローブの校正方法とタッチプローブ
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
3次元座標計測装置
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
41 - 60 / 715
[ Back to top ]