
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
101 - 120 / 715
光学測定方法および装置
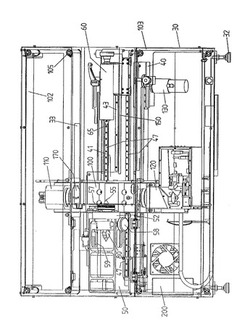
【課題】加工部片の寸法測定を容易にかつ小作業域で、できるようにする。
【解決手段】測定する部片を主軸台57と心押し台60との間に維持するため、固定された主軸台57と、固定された主軸台に対向し、主軸台57に近付くか、離れて移動するために線形軸に沿って移動可能である、移動可能な心押し台60とが取り付けられた基準支持40と、測定下の部片によって遮られるコリメート光のビームをx軸にわたって誘導するための光源110を担持し、さらに、光源110と整列し、測定下の部片によって遮られなかったコリメート光のビームの残留光を受けるように配置されている、光学検出器120を担持している、線形軸に沿って移動可能な可動往復台100とを有す。
(もっと読む)
形状測定装置

【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物を照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータ17と、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28と、振れ検出部28に検出された振れに基づいて測定の制御を行う制御部30とを備えて構成される。
(もっと読む)
処理装置、処理システム、座標補正方法および座標補正プログラム
【課題】スループットの低下を低減しつつ、レシピに登録された座標と実際の座標とのずれを自動的に補正する。
【解決手段】基板Wにおけるモデルの検査・測定座標を記憶したレシピに基づいて搬送ステージ13上に載置された基板Wにおけるモデルを検査・測定する基板検査・測定装置10は、搬送ステージ13上に載置された基板Wにおけるモデルの実座標を特定し、特定した実座標をレシピに登録する(ステップS114、S415)。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの作成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。車両からの風景を撮影した撮影画像の類似度を算出して、各撮影画像に類似度を付与し、互いに類似度が相違する処理対象撮影画像を有用撮影画像として選択し、この有用撮影画像から画像特徴点データを生成して、参照データとしてデータベース化する。
(もっと読む)
基板加工およびアライメント
【課題】基板の加工領域の位置に関する位置情報をアライメントマークに関連させて取り出し、アライメントと実際の加工とを切り離して基板を効率的に製造する方法を提供する。
【解決手段】基板(5;42)は、基板(5;42)に対して固定されたアライメントマーク(6a、6b;12a…d;44a…c)が設けられ、基板(5;42)を加工する前に、基板(5;42)の加工領域の位置に関する位置情報がアライメントマーク(6a、6b;12a…d;44a…c)に関連させて取り出された場合に、アライメントと実際の加工とを切り離すことによって効率よく製造することができる。この場合に、アライメントは、加工時にアライメントマーク(6a、6b;12a…d;44a…c)の位置を1回だけ再測定し、加工領域の位置に関する保存された位置情報を使用することにより行うことができる。
(もっと読む)
物体検出装置
【課題】 検出物までの距離、位置を検出する物体検出装置の提供
【解決手段】 投光素子LE(s,t)が検知光を投光しているとする。このときに、受光素子RE(s,t)、受光素子RE(s,t+1)、受光素子RE(s,t+2)、受光素子RE(s,t+3)を、順次、作動させる。例えば、投光素子LE(s,t)が検知光を投光しているときに、受光素子RE(s,t+3)が反射光を受光したとすると、物体が位置c4付近にあると判断できる。投光素子LE(s,t)から投光方向l1に向かって投光された検知光が、位置c4付近に存在する物体によって反射され、その反射光が受光方向r4に向かって進行し、受光素子RE(s,t+3)によって受光されたと考えられるからである。
(もっと読む)
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
画像処理装置、及び画像処理プログラム
【課題】2時刻法により被撮像物の変状部分の位置を検出する確率が高い画像処理装置を提供する。
【解決手段】第1撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第1温度画像データと、第2撮像時間帯に被撮像物を撮像して得られた複数の画像フレームからなる第2温度画像データと、第1温度画像データ及び第2画像データの各画像フレームを撮像した位置の情報とを用いて、第1温度画像データと第2温度画像データと位置の情報とに基づき、各第1温度画像データの画像フレームとそれに一部重複する第2温度画像データの画像フレームとを対応付ける。また、対応付けられた第1温度画像データの各画像フレームの温度値のピークの位置と、対応付けられた第2温度画像データの各画像フレームの温度値のピークの位置とを検出するとともに、温度値のピークが被撮像物の座標上で一致する場合に、一致したピークの位置を変状位置として検出する。
(もっと読む)
光学式表面粗さ測定装置
【課題】 微小な凹凸に加えて周期と変動量の大きな凹凸が存在する測定対象物の表面粗さも検出できるようにする。
【解決手段】 測定対象物OBの表面上を接触しながら移動するスライダ44に対物レンズ305を配置するとともに、スライダ44をプローブ40によって光学ヘッド本体30に弾性的に支持する。レーザ光源301からのレーザ光を対物レンズ305により集光させて測定対象物OBの表面に照射し、測定対象物OBの表面からの反射光をフォトディテクタ308で受光して、フォーカスエラー信号を生成する。フォーカスエラー信号を用いてレーザ光の焦点位置から測定対象物OBの表面位置までの距離に応じて変化する距離を計算して、前記計算した距離に、スライダ44の光学ヘッド本体30に対する相対位置の変動量を加味して測定対象物OBの表面の基準面に対する凹凸の大きさを計算する。
(もっと読む)
計測車両、道路地物計測システム
【課題】移動体にレーザレーダを搭載して地面や壁面に照射し、移動しながら目標物の位置を計測しようとする場合、複数のレーザレーダを用いることは多いが、レーザレーダを単に平行に並べて設置すると、移動速度によって計測点の密度にムラが発生したり、走行に平行な方向と垂直な方向とで計測点の密度差が大きい、という問題があった。
【解決手段】レーザレーダ同士に角度を持たせて設置することにより、計測点の密度のムラや方向による密度差の大きさを軽減することができる。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
非接触型土留め壁変位計測方法
【課題】 コストを大幅に増やすことなく計測点を増やすことができる非接触型土留め壁変位計測方法を提供する。
【解決手段】 非接触型土留め壁変位計測方法において、傾斜計4〜9が深さ方向に間隔を取って配置され、変位が計測される基準となる土留め壁2を設定し、この土留め壁2の深さ方向に間隔を取って配置される傾斜計4〜9の位置に、この傾斜計4〜9の箇所と対面に位置する土留め壁3の箇所との距離を計測する非接触型距離計10とを配置し、前記非接触型距離計10による測定値に基づいて前記対面に位置する土留め壁3の変位を計測する。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
基準位置算出システム、および基準位置算出方法
【課題】撮像装置によって撮像された熱画像において基準に用いられる位置の画像座標系における座標値を高い精度で算出することができる基準位置算出システムを提供する。
【解決手段】反射部材51が、遠赤外線を反射する。熱源52が、放射した遠赤外線が反射部材51によって反射される位置に設置される。撮像装置70が、位置測定用装置50を撮像した熱画像を画像処理装置60に出力する。座標値算出手段61が、撮像装置70が出力した熱画像において、単位面積当たりの遠赤外線の強度が所定の値以上である領域の中心の画素の画像座標系における座標値を算出する。
(もっと読む)
画像測定機
【課題】撮像手段の視野よりも大きい被測定物を測定する場合であっても被測定物を適切に測定することができる画像測定機の提供。
【解決手段】画像測定機1は、被測定物、及び撮像手段21を相対的に移動させて撮像手段21に複数の画像を撮像させる撮像制御部32と、撮像手段21にて被測定物を撮像する位置を取得する位置取得部33と、撮像制御部32にて撮像される各画像を重畳させて連結させることで連結画像を生成する連結画像生成部34と、位置取得部33にて取得される位置に基づいて、連結画像を生成する際に連結部分で生じる誤差を連結部分ごとに算出する誤差算出部35と、連結画像における画素の数に基づいて、被測定物を測定する画像測定部36と、誤差算出部35にて算出される連結部分ごとの誤差に基づいて、画像測定部36による測定結果を補正する補正部37とを備える。
(もっと読む)
3次元計測装置、その処理方法及びプログラム
【課題】
物体の位置及び姿勢の計測に際して、各エッジに信頼度を付与したモデルを用いて位置姿勢算出処理に対する各エッジの寄与度を変更するようにした技術を提供する。
【解決手段】
3次元計測装置は、3次元幾何モデルを用いて計測対象物体を複数の異なる視点から観測した複数の視点画像を生成し、当該複数の視点画像各々から計測対象物体のエッジを第2のエッジとして検出し、3次元幾何モデルにおける第1のエッジ各々に対して第2のエッジを対応付けた結果に基づいて第1のエッジ各々の信頼度を算出し、当該信頼度を3次元幾何モデルに付与した信頼度付きモデルを生成する。
(もっと読む)
ビード検査方法及びビード検査装置
【課題】検査対象の大きさに関わらず、非破壊でビードののど厚を算出可能なビード検査方法及びビード検査装置を提供する。
【解決手段】ビードBの品質を検査するビード検査工程S1及びビード検査装置1であって、ビード検査装置1は、ろう付けワイヤWの供給速度を計測するワイヤ供給速度計測装置11と、第一母材M1、第二母材M2、及びビードBの表面の位置座標データを計測し、解析する解析部12とを具備し、ろう付け前に第一形状データを計測する第一形状データ計測工程S10を行い、ろう付け後に第二形状データを計測する第二形状データ計測工程S30を行い、第一形状データ、第二形状データ、及びろう付けワイヤWの供給速度に基づいて、特徴量の予測値を算出する特徴量算出工程S40を行い、特徴量の実測値と、のど厚の実測値とに基づいて作成される回帰式によってのど厚の予測値を算出するのど厚算出工程S50を行う。
(もっと読む)
光学測定システム
光学測定装置は、固定された主軸台(57)が取り付けられた基準支持体(40)、ならびに、固定された主軸台に対向し、および測定される部品を主軸台(57)と心押し台(60)との間で維持するために主軸台(57)に近づいてくる、またはそこから離れて移動するための線形軸(x)に沿って移動可能である、移動可能な心押し台(60)、ならびに線形軸(x)に沿って移動可能な可動式往復台(100)を含むものであって、往復台は、コリメート光束が測定中の部品によって遮られるようにx軸を横切って方向付けるための光源(110)を担持し、往復台は、光源(110)に配列され、および測定中の部品によって遮られなかったコリメート光束の残留光を受けるように配置されている光学検出器(120)を、さらに担持する。測定装置は、光学往復台(100)および心押し台(60)が摺動可能に係合されている基準支持体(40)上に固定されている直線状ガイド(47)を有するのに対し、主軸台(57)は、基準表面上に固定され、少なくとも一部が前記直線状ガイド(47)上に懸下している主軸台担持部(50)上に設置されている。  (もっと読む)
(もっと読む)
液滴吐出装置
【課題】従来の液滴吐出装置では、描画にかかる時間を短縮することが困難である。
【解決手段】ワークWに対向した状態で、液状体をワークWに向けて液滴として吐出する吐出ヘッド33と、吐出ヘッド33の駆動を制御するヘッド制御部と、ワークWと吐出ヘッド33との間の隙間量Gを検出する変位測定装置15と、を含み、ヘッド制御部は、変位測定装置15からの前記隙間量Gの検出結果に基づいて、吐出ヘッド33における前記液滴の吐出タイミングを補正する、ことを特徴とする液滴吐出装置。
(もっと読む)
原料ヤードの原料山計測システム、原料ヤードの原料山計測方法、及びコンピュータプログラム
【課題】 原料ヤードにおける原料山の状態を従来よりも高精度に計測できるようにする。
【解決手段】 ブーム106aに取り付けられた2Dレーザ距離計101a、101bから原料山100にレーザ光を照射し、原料山100からの反射光を受光し、受光した反射光と、そのときのレーザ光の照射方向とから求められる原料山100の表面の座標を、IMU103及びGPSコンパス104で測定されるブーム106aの姿勢に基づいて変更し、変更した原料山100の表面の座標に基づいて、原料山100の3次元形状と、原料山100の体積とを計算し表示する。
(もっと読む)
101 - 120 / 715
[ Back to top ]