
Fターム[2F065FF67]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 位置;移動量 (715)
Fターム[2F065FF67]に分類される特許
61 - 80 / 715
三次元形状測定装置
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
拡張現実提供装置、拡張現実提供システム、拡張現実提供方法及びプログラム

【課題】少ないマーカの種類で多様なコンピュータグラフィックス画像データを重畳表示することを可能とする技術を提供することを目的とする。
【解決手段】識別情報を含む画像を撮影する撮影手段と、撮影手段により撮影された画像の画像データに含まれる識別情報を認識する認識手段と、前記識別情報と前記コンピュータグラフィックス画像データとの対応関係ルールを記憶するルール記憶手段と、認識手段により認識された識別情報に対応するコンピュータグラフィックス画像データを決定する決定手段と、決定手段により決定されたコンピュータグラフィックス画像データを現実空間の画像と合成して表示させる表示手段とを有し、認識手段により同一の識別情報が複数認識された場合、前記ルール記憶手段より同一複数の識別情報に対する対応関係ルールに基づいてコンピュータグラフィックス画像データを合成して重畳表示することによって課題を解決する。
(もっと読む)
検出装置
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
テールクリアランス測定装置
【課題】測定効率の向上を図れると共に、作業員の負担の軽減を図る上で有利なテールクリアランス測定装置を提供する。
【解決手段】テールクリアランス測定装置30は、カメラ部32と、コンピュータ34とを含んで構成されている。カメラ部32は、テール部14の内周面1402および該内周面1402に対向するセグメント20の外周面2002を撮影して画像データを生成するものである。カメラ部32は、テール部14の内周面1402およびセグメント20の外周面2002の周方向に90度の間隔をおいた4個所を撮影するように4個設けられている。コンピュータ34は、ケーブルを介してカメラ部32から供給される画像データに基づいてテール部14のスキンプレート14Aの内周面1402とセグメント20の外壁面2002とのテールクリアランスを導出する。
(もっと読む)
ステレオカメラの校正装置および校正方法
【課題】ステレオカメラの校正装置および校正方法を提供すること。
【解決手段】ステレオカメラの校正装置300は、第1カメラ320と、第2カメラ318と、カメラステー140とを含んでおり、コリメータユニット302がステレオカメラから距離を隔てて配置されたテストチャート306が無限遠位置に配置されたと等価な光路を形成させている。視差算出部362は、ステレオカメラが撮影した左右画像からテストチャート306とステレオカメラとの間の異なる光学的距離に相当する視差データを計算し、パラメータ算出部364が、視差算出部362が計算した視差データおよびテストチャートまでの実距離データを使用してステレオカメラの測距パラメータである視差オフセットbおよび距離換算パラメータaを算出している。
(もっと読む)
形状測定システム及び形状測定方法
【課題】スキャナを用いた形状測定システムにおいて、いわゆる手振れによる測定誤差を低減することをその目的とする。
【解決手段】形状測定システム1は、多関節アームの先端に取り付けられ、測定対象Aに対し手動で移動可能であり、測定対象Aに対しレーザ光を照射しその反射光を、光センサ61の複数の受光ラインで順次検出するスキャナ21と、スキャナ21の手振れ情報を光センサ61の受光ライン毎に取得する加速度センサ42と、各受光ラインのスキャナ21の手振れ情報に基づいて、受光ライン毎に画像の位置情報を補正する手振れ補正部80と、スキャナ21の画像情報と手振れ補正部80で補正された画像の位置情報に基づいて、測定対象Aの画像を生成する画像生成部100と、を有する。
(もっと読む)
検出装置
【課題】合焦精度の低下を軽減する。
【解決手段】ラインピクセルにより受光される光量データが飽和したとき、ラインピクセルの略中央のピクセルである合焦ピクセルを過ぎたときの前後2ピークのピークピクセルを決定し(S11)、決定したピークピクセルにおけるZ軸カウンタ値を取得し(S12)、取得したZ軸カウンタ値を直線補間して、合焦ピクセルにおけるZ軸カウンタ値を推定し(S13)、推定された合焦ピクセルにおけるZ軸カウンタ値に基づいて、対象物2の面位置を検出する(S14)ので、受光される光量が飽和したときでも、合焦精度の低下を軽減することができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
部品位置計測方法
【課題】例えば部品をチャックで傾いて把持した場合でも、部品の先端位置を正確に認識できる部品位置計測方法を提供する。
【解決手段】部品1をチャック2で把持し、その把持位置を計測基準位置Aとして部品を移動させ、部品に交差する方向の光線3,4を部品で遮断させ、遮断位置B,B’における部品のチャックを支点とした傾き方向の位置ずれを計測手段で計測し、その計測値を登録済みの計測基準位置と比較してずれ量Hを求め、ずれ量を一辺とし、計測基準位置Aを一点とする仮想三角形aと、遮断位置B,B’と部品の先端との二点を通る仮想三角形bとの相似関係より、部品の先端位置Cの計測補正値hを求め、ずれ量Hと計測補正値hとの総和で部品先端位置ずれ量ΔZを求める。
(もっと読む)
パターンの形成された基板の粗さを得る方法、パターンの形成された基板の粗さを得るための装置
【課題】パターン付きウェハの表面粗さを高精度で非破壊に測定できる平坦な検査範囲を、目視によらず探索できる表面検査装置を提供する。
【解決手段】照射される照射光により生じる散乱光の散乱光強度を、パターン付きウェハ200上の測定座標に対応付けて測定し、ウェハ200の表面粗さを検査する表面検査装置において、制御部が、下限閾値以上である散乱光強度の測定座標を抽出し、抽出された測定座標の周辺に相当するパターンの全体レイアウト401の一部の部分レイアウト405a内に、表面粗さの検査の検査範囲406を設定し、検査範囲406における表面粗さを求める。
(もっと読む)
リソグラフィ装置の位置決めシステムおよび方法
【課題】 位置決めの正確さおよび/または強健性が改善されたリソグラフィ投影装置のアライメント・システムを提供する。
【解決手段】 リソグラフィ装置の位置決めシステムは、位置決め放射線源1、第1検出器チャネルおよび第2検出器チャネルを有する検出システム、および検出システムと連絡する位置決定ユニットを有する。位置決定ユニットは、第1および第2検出器チャネルからの情報を組み合わせて処理し、組み合わせた情報に基づいて、第2オブジェクト上の基準位置に対する第1オブジェクト上の位置決めマークの位置を決定する。
(もっと読む)
レーザ光の光軸方向の測定方法、長さ測定システム、および位置決め精度の検査方法
【課題】ターゲットの位置決め範囲が従来より狭く、かつ、測定光の光軸が固定されたレーザ干渉計であっても、測定光の光軸方向を測定可能な方法を提供すること。
【解決手段】レーザ干渉計104と再帰反射体106とハンドリング装置102を有する測定システム100を用いる。レーザ干渉計104は、測定光を再帰反射体106に照射し、その反射光と参照光との干渉光強度を検出する。ハンドリング装置102は、再帰反射体106を測定位置まで移動して位置座標情報を検出する。まず、レーザ干渉計104が干渉光を検出でき、かつ同一平面上に存在しない少なくとも4つの測定位置piを選ぶ。再帰反射体106を各測定位置piに移動させて、その位置座標情報を検出する。レーザ干渉計104が再帰反射体106までの距離の変化量を測定する。各測定位置の位置座標情報と各距離の変化量に基づき測定光のベクトル情報 a を算出する。
(もっと読む)
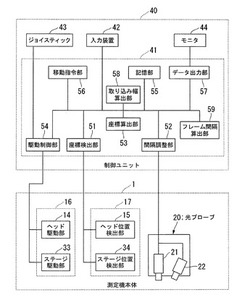
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】立体的に配置された鉄筋の配筋情報を取得する。
【解決手段】撮影者は、撮影対象部位2を決定し(S702)、撮影対象部位2の鉄筋のうち、4隅の鉄筋にマーカMKを取り付け、1の鉄筋に方位確認用マーカDMKを取り付ける(S703)。次に、鉄筋内側の中心部付近に全方位カメラ3を挿入し(S706)、その中心部から360度全周囲の鉄筋を全方位カメラ3で撮影し(S707)、撮影した全周囲画像のデータを全方位カメラ3から携帯端末4に取り込む(S708)。携帯端末4は、取り込まれた全周囲画像を方位確認用マーカDMKに基づいて平面画像に展開する(S709)。続いて、展開した平面画像において方位確認用マーカDMK及びマーカMKを検出することにより、その平面画像を4面の画像に分割する(S710)。さらに、分割した各面の画像に対して画像処理を行い、鉄筋の径長やピッチを計算する(S711)。
(もっと読む)
光学情報処理装置、光学情報処理方法、光学情報処理システム、光学情報処理プログラム
【課題】レーザースキャナを用いた得た三次元点群位置データを補完する三次元点群位置データを撮影画像から得る技術において、当該撮影を行う条件における撮影手段のキャリブレーションを効率よく簡便に行う。
【解決手段】第1の視点から建物120のレーザースキャンを行い、三次元点群位置データを得る。他方で、第2の視点から第1の視点でオクルージョンとなる建物120の部分のステレオペア画像の撮影を行う。そして、第2の視点で得たステレオ画像と第1の視点で得た三次元点群位置データとの対応関係を求めることで、当該三次元点群位置データを利用してのステレオペア画像撮影装置124のキャリブレーションを行なう。
(もっと読む)
白色干渉法による振動測定装置及び振動測定方法
【課題】白色干渉法を用いて、μメートルオーダの高精度で測定対象物の位置を決定し、さらに測定対象物の振動周波数をkHzオーダの高速で検出でき、かつナノメートルオーダの振動変位量を測定できる振動測定装置及び振動測定方法を提供する。
【解決手段】白色光を参照光と測定光に分割する光カプラと、参照光の進行方向を変える光学素子、参照光の進行方向を反転する反射素子、光学素子を往復移動させる直動ステージ及び光学素子の位置を取得するスケールヘッドからなる参照光路長スキャナ部と、測定光を発散又は収束させる集光レンズと集光レンズを移動させるレンズ移動機構からなるセンサ部と、反射して返った参照光と測定光を合成して干渉信号を出力する光検出器と、所定時間取得した干渉信号の強度を高速フーリエ変換処理で解析して、測定対象物の振動周波数及び振動変位量を求める処理装置とからなる振動測定装置の構成とした。
(もっと読む)
精密ソルダレジストレジストレーション検査方法
【課題】精密ソルダレジストレジストレーション検査方法を提供する。
【解決手段】マシンビジョン検査システムを動作させて、蛍光材料内の特徴の位置を再現可能に特定するために、蛍光画像を取得するための蛍光撮像高さを決定する方法が開示される。蛍光材料外に露出した露出ワークピース部分の高さが特定される(例えば、高さセンサまたはオートフォーカス動作を使用して)。特定された高さは再現可能である。露出部分は、蛍光材料および/または蛍光材料内に配置された特徴に対して特徴的な高さを有する。蛍光材料内部であり得る蛍光撮像高さが、特定された露出部分の高さに相対して決定される。蛍光撮像高さは、結果として生成される蛍光画像において蛍光材料内に配置された所望の特徴の検出を向上させるように決定される。様々なワークピースに対して、この方法は、従来既知の方法よりも確実に、適宜合焦された蛍光画像の自動取得を提供する。
(もっと読む)
鋼管の水圧試験機及び鋼管水圧試験後の管長計測方法
【課題】水圧試験機の一連の試験工程の中に検尺機能を付加することにより、次工程条件の最適化に反映させることを可能にする。
【解決手段】水圧試験時の両ヘッド部1,2の移動距離をパルスジェネレータ方式で計測可能とし、各ヘッド部に前記鋼管の管端位置を検出するためのレーザ式位置センサ41,42を設置し、鋼管3のセット前に各ヘッド部を移動させてそのレーザ式位置センサのレーザ光路を所定の原点に一致させ、その時点から、水圧試験を経て各ヘッド部を鋼管から離間させる際に各レーザ式位置センサが鋼管の管端位置を検出した時点まで、各ヘッド部の移動距離を計測し、この計測結果を用いて鋼管の管長を算出する。
(もっと読む)
61 - 80 / 715
[ Back to top ]