
Fターム[2F065JJ16]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 1個 (2,498) | PSD (268)
Fターム[2F065JJ16]に分類される特許
1 - 20 / 268
レーザトラッカー
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法及び成形品

【課題】高精度に移動体の位置を計測可能な位置計測装置を提供する。
【解決手段】位置計測装置1は、周期的に高さが増減する目盛パターンが形成された目盛部30の高さ変位を、変位センサ10によって計測する。そして、この変位センサ10によって計測された高さの周期的な変位を、演算部20によって位置情報に演算して、移動体の位置を計測する。目盛部30の目盛パターンは、平面の組み合わせによって形成されるため、変位センサ10の出力電圧は平面の傾きに応じた直線を組み合わせた波形となる。
(もっと読む)
レーザー高さ測定装置および部品実装機
【課題】正確に測定位置を制御でき、かつセンサの取り付け位置調整機構や位置調整作業を必要とせずに測定位置の制御精度を保つことができるレーザー高さ測定装置を提供する。
【解決手段】レーザー光L1を照射するレーザー光照射部61および対象物で反射されたレーザー光を検出する反射光検出部62を有するレーザー高さセンサ6と、レーザー高さセンサ6を平面内で移動させるセンサ移動機構(ヘッド駆動機構41〜43)と、所定の較正位置(光入射軸AO上)に配置された画像カメラ(部品カメラ5)と、レーザー光L1を減衰しつつ透過する減光フィルタ71と、レーザー高さセンサ6を較正位置AOに位置決めしてレーザー光L1を照射し、減光フィルタ71を透過したレーザー光を画像カメラ5で撮像してレーザー光画像を得るレーザー光撮像手段と、座標位置の補正値をレーザー光画像上でのレーザー光の位置に基づいて求める補正値取得手段と、を備える。
(もっと読む)
形状計測方法
【課題】三次元計測器によって計測した点群データから計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを生成する。
【解決手段】計測点群データに基づいて計測対象物の表面形状を表すサーフェイスを陰関数として作成する工程と、サーフェイスが存在する計測領域全体を三次元ドロネー図による分割処理により隙間なく、重複なく埋め尽くされた四面体の小領域(以下、セルという)に分割する工程と、セルの各頂点をサーフェイスの内側に存在する内点5と、外側に存在する外点6とに分類する工程と、境界セルを抽出する工程と、境界セルとサーフェイスとの交点7を計算する工程と、各境界セルが持つ交点7を繋ぎ合わせることにより三角形又は四角形の面を求める工程と、全ての面を結合する工程とを含むので、計測対象物のmanifoldでかつ自己交差を含まない閉じた多面体データを自動的に作成することができる。
(もっと読む)
6軸測定系の原点出し用治具及び原点出し方法並びに固体撮像素子の相対位置調整方法
【課題】 原点出し用治具の設置再現性の問題を解決すると共に、原点出しを簡易にする。
【解決手段】 被測定対象物の煽り、高さ並びに平面位置及び平面回転位置の6軸を同時に検出できる6軸測定装置を用いて、6軸基準位置を設定するための原点出し用治具1であり、治具本体1aの面に、煽りの原点出しのための鏡面加工された第1の加工部2、高さの原点出しのための凹状の第2の加工部3並びに平面位置及び平面回転位置の原点出しのための穴状の第3の加工部4,5を設け、治具本体1aにはこの治具本体原点位置を位置決めするための穴からなる位置決め部6,7を設けてある。
(もっと読む)
追尾式レーザ干渉計
【課題】移動体の移動量と、移動体の移動方向と直交する方向におけるずれ量との測定にかかる測定時間を短くすることができるとともに、測定にかかるコストを低減できる追尾式レーザ干渉計を提供する。
【解決手段】追尾式レーザ干渉計1は、レトロリフレクタRで反射される測定光L22を用いて移動体Mまでの距離を測定する測長部21と、レトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22とを有する本体2と、検出器222からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備え、制御手段3は、本体2にレトロリフレクタRを追尾させることを停止させた状態で、レトロリフレクタRで反射された測定光L21の検出器222における受光位置Q2に基づいて、移動体Mの移動方向に対して直交する方向における移動体Mのずれ量を測定するずれ量測定部32を備える。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円環状の測定対象物に対してレーザトラッカーから見て反対側の周面の空間座標を測定することを可能にし、測定時の取扱いが簡単で、一人でも容易に直径を測定することができる測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgが設置されるターゲット設置部21と、ターゲット設置部21を測定対象物Wの円周方向に移動させる移動機構部22とを備える。移動機構部22は、測定対象物Wの測定対象周面である外周面Waに転接する第1の周面接触部材26と、測定対象物Wの内周面Wbに転接する第2の周面接触部材27と、測定対象物Wの上端面Wcに転接する端面接触部材28とを有する。第1の周面接触部材26は、ターゲット設置部21の中心を通る鉛直方向の軸O1回りに回転自在である。第1または第2の周面接触部材26,27を回転させる移動用回転駆動源41を設ける。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
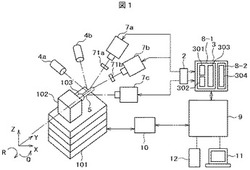
厚さ測定装置
【課題】C形フレームの機械的なドリフトによる距離検出器間の距離の変位を瞬時に測定し、厚さ測定誤差を補正する厚さ測定装置を提供することを目的とする。
【解決手段】C形フレーム3の腕部に設けられる第1の距離検出器1と第2の距離検出器2との出力から厚さを求める厚さ測定装置であって、C形フレーム3の腕部の下部に設けられ、腕部空間内に、レーザビームの光路にハーフミラーを設けて、当該ハーフミラーの反射した第1のレーザビームの位置の変化を検出する第1のビーム位置変位検出器4aと、当該第1のビーム位置検出器の出力から第1のレーザビームの入射角度の変位と記第1の距離検出器と第2の距離検出器間の距離検出器間の距離の変位と、を求める第1のビーム位置変位処理部4bとを備え、厚さ測定値を自動的に補正するようにした厚さ測定装置。
(もっと読む)
タイヤトレッド面の断面形状ならびにトレッド溝の深さを測定する測定装置。
【課題】タイヤのトレッド面の断面形状とトレッド溝の深さを非接触で高速で測定する装置
【解決手段】この発明は、タイヤのトレッド面の断面形状を測定して、測定結果からトレッド溝の深さを計測する装置であり、タイヤのトレッド面近くに幅方向に並置するガイド機構と、トレッド面を単一光で照射する光源装置と、単一光の反射輝点を撮影するデジタルカメラと、光源装置並びにデジタルカメラをガイド機構に沿って移動させながら反射輝点を撮影する制御装置と撮影された画像データからトレッド面断面形状とトレッド溝の深さを測定する手段を備えたことを特徴とする。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
光学系の光学面の間隔を測定する方法及び装置
【課題】本発明の目的は、単レンズ又は多レンズ光学系の光学面の間隔が確実かつ高精度に測定され得る装置及び方法を指定することである。
【解決手段】多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法の場合に、光学系のセンタリング状態は、光学系(38)の少なくとも2つの光学面(S1、S2、S3)を考慮することにより記録される。光学系(38)は、センタリング状態を考慮して、光学系(38)の光軸(40)が参照軸(34)とできる限り揃うように調節される。次のステップでは、光学面(S1、S2、S3)の間隔が、短コヒーレンス干渉計(24)を用いて決定される。この目的のために光学系(38)に向けられる測定光線(50)は、参照軸(34)に沿っている。試験片(38)の事前の調節により、光学系の少なくとも2つの光学面を考慮して、高精度の測定が得られる。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
高さ測定方法および電子ビーム描画装置
【課題】試料の高さを正確に測定することのできる高さ測定方法と、高さを正確に測定して高い精度で描画することのできる電子ビーム描画装置とを提供する。
【解決手段】光の波長を所定値としたときの反射光の光量を測定し、光量が閾値以下である場合には光の波長を変えて反射光の光量を測定する工程を繰り返し、光量が閾値より大きくなる波長で試料の高さを測定する。あるいは、光の波長を変えて反射光の光量を測定し、光量が最大となる波長で試料の高さを測定する。
(もっと読む)
1 - 20 / 268
[ Back to top ]