
Fターム[2F065MM03]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 物体の移動 (2,140) | 直線移動 (1,219)
Fターム[2F065MM03]に分類される特許
1,201 - 1,219 / 1,219
印刷半田検査装置
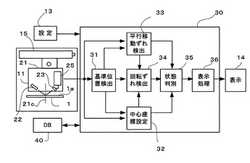
【課題】 印刷半田の平行移動ずれと角度ずれを共に検出できる印刷半田検査装置を提供し、更に、印刷半田の平行移動ずれと角度ずれの推移を把握容易な形態で表示できる印刷半田検査装置を提供する。
【解決手段】 プリント基板1の部品実装面1aに光照射して反射光量に応じた検出信号を出力する検出ヘッド11と、基板設計値情報および検出信号に基づいて部品実装面1aにおける半田印刷領域の基準位置を検出する基準位置検出手段31と、基板設計値情報および検出信号に基づいて複数の印刷半田の平行移動ずれを検出する平行移動ずれ検出手段33と、基準位置検出手段31の検出情報に基づいて半田印刷領域における回転中心座標を設定する中心座標設定手段32と、プリント基板1の設計値情報、平行移動ずれ検出手段33の検出情報および中心座標設定手段32の設定情報に基づいて複数の印刷半田の角度ずれを検出する回転ずれ検出手段34とを備える。
(もっと読む)
光プローブチップを有する測定装置
加工物の形状、輪郭および/または粗さを測定するための測定装置(1)は、大きな開口数を有する非接触光プローブに基づいている。プローブは、少なくとも2つの光受容体が関連付けられる少なくとも2つの異なる焦点を有する。2つの光受容体は、加工物表面がプローブの測定範囲内に維持されるように、光プローブを追跡するための位置決め装置(13)を制御するための差分信号を生成する。差分信号は、センサ器具(3)の位置の高速かつ正確な追跡をもたらすことが分かっている。  (もっと読む)
(もっと読む)
特にマイクロシステム技術における幾何構成の干渉と画像化の組合せに基づく検出のための装置および方法
本発明による装置は、少なくとも2つの異なる測定モードで動作することができる対物レンズを備える。第1の干渉モードにおいて、測定対象物は、干渉光学測定法によって測定される。第2の画像化測定モードにおいて、光学画像が、たとえばカメラのような検出器アレイで生成され、画像処理ルーチンを施されてもよい。2つの測定モード間の切換えは、対物レンズの照明の種類と、干渉計の参照ビーム経路に配置されることが好ましく、用いられる光のスペクトル組成に応じて参照ビーム経路を動作状態または非動作状態にする素子と、によって行われる。このようにして、2つの測定モード間の簡単かつ迅速な切換えは、対物レンズの交換を必要とすることなく、または対物レンズの移動も必要とすることなく行われる。切換えの迅速さに加えて、干渉分光法によって生じた測定データと画像処理によって生じた測定データとの間の良好な相関が達成される。干渉分光法および画像処理によって生じた測定データは、全く同一の基準座標系で得られる。 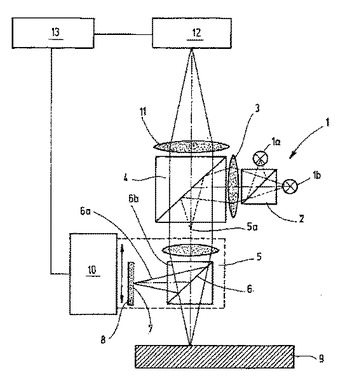 (もっと読む)
(もっと読む)
物体の密度と寸法特性を測定する方法およびシステムならびに製造中の核燃料ペレットを検査する応用例
物体(100)の質量密度を自動的に測定するシステムは、
前記物体(100)の有意寸法(x)を測定する装置(2)と、
前記物体(100)の通過により減衰した光子線の強度(I)を測定する装置(30)と、
捕捉、処理および分析装置(200)と、
物体(100)を移送する手段(70、72、80、82、84、86、88)と、
物体(100)の位置を調整する第1の手段(74、76、78)と、
物体(100)の位置を調整する第2の手段(90、92、94、96、98)とを含む。
前述のシステムを利用する方法は、装置2および30の構成部を較正するステップと、物体の有意寸法を実際に測定するステップ(100)とを含む。前記ステップは、物体の集合の中の各物体(100)に実行される。  (もっと読む)
(もっと読む)
分配システムにおける測定装置および方法
本発明は、担体に置かれた対象物の存在、位置および/または形状の測定を可能にする測定装置システムならびにかかる測定のため方法の分野に関する。測定装置には、入射光で前記対象物および前記担体を照射するように配置された少なくとも1つの光源と、前記少なくとも1つの光源から所定の距離に置かれた少なくとも1つのセンサであって、前記担体が前記移動方向に移動されるときに前記対象物および前記担体からの反射光を検出することによって、前記対象物および前記担体を繰り返し測定するように、かつ検出光を電気信号に変換するように構成された少なくとも1つのセンサと、電気信号を用いて、前記対象物および前記担体の測定のそれぞれの三次元サブ画像を得るように、かつ1つまたは複数の前記取得サブ画像から、前記対象物および前記担体の三次元画像を得るように構成された画像処理ユニットと、前記三次元画像から、前記担体における前記対象物の存在、位置および/または形状を決定するように構成された計算ユニットと、が含まれる。  (もっと読む)
(もっと読む)
パンタグラフのすり板検査装置。

【課題】
従来のカメラによるパンタグラフすり板の検査では、すり板側面の照明を当ててパンタグラフを撮像していたが、この方法では、すり板上面と側面を高精度に分離することが難しかった。
【解決手段】
カメラでパンタグラフを撮像する際に、パンタグラフすり板上面を照射するストロボ照明と、パンタすり板側面を照射するストロボ照明を設け、すり板上面を照射するストロボ光に比べてすり板側面を照射するストロボ光の光量を少なくして撮像する構成とした。
(もっと読む)
基板の上に配置された膜の特性を測定する方法およびシステム
本発明は、基板の上に配置された膜の特性を測定する方法およびシステムを提供することを対象とする。該方法は、膜の上において複数の処理領域を識別することと、複数の処理領域のサブセットの特性を測定することと、測定された特性を確定することと、測定された特性の1つの変化を決定することと、測定された特性の1つと、サブセットの残りの処理領域に関連付けられる測定された特性との比較に基づいて、変化の原因を関連付けることとを含む。該システムは、上述された方法を実施する。 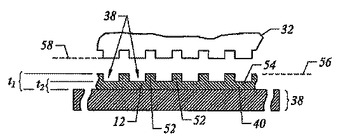 (もっと読む)
(もっと読む)
製造物の位置決めシステム
製造物の位置決めシステムであって、製造物を支持するチャック(71)、当該チャックを支持する中間台(79)及び当該中間台(79)を支持する固定ベース(72)を有するシステム。チャック(71)は中間台(79)に対して第1方向X(80)を移動することが可能で、中間台(79)は当該固定ベース(72)に対して第2方向Y(81)を移動することが可能である。システムはさらに固定ベース(72)に対するチャック(71)の位置を測定する少なくとも1つのレーザー干渉計(73,74,75,76,77,78)を有する。当該レーザー干渉計の主部(73,74,75,76,77,78)は、チャック(71)上の反射体(83,84,85)と固定ベース(72)上の反射体(82,87)との距離を測定することが可能なように、当該中間台(79)に取り付けられている。  (もっと読む)
(もっと読む)
長寸の物体の姿勢から得られた姿勢データの処理方法及び装置
【課題】長寸の物体の姿勢から得られた姿勢データを処理する装置及び方法を提供する。
【解決手段】長寸の物体(例えば、筆記用具、ポインタ、ロボットアーム、又は棒)の先端は、1つ又はそれ以上の不変特性を有する平面と接触する。長寸の物体の姿勢は、該物体内に搭載された光学測定システムにより、不変特性を利用して光学的に測定される。測定された姿勢は、その姿勢に対応する姿勢データを作成するのに使用される。そして、作成された姿勢データの一部が特定され、アプリケーションに(例えば前記姿勢データの一部が命令データ又は入力データとして機能するユーザアプリケーション)に送信される。長寸の物体はその先端が前記表面と接触しながら動くので、長寸の物体の姿勢は、前記動作を所望する時間分解能で測定するために、十分に頻回の測定時間tiで定期的に測定される。
(もっと読む)
表面凹凸の測定・評価方法およびシステム、表面凹凸評価装置並びに表面凹凸の測定・評価方法のプログラム
【課題】 人間の感性に頼ることなく、定量的かつ再現性の良いローピングなどの程度の測定・評価評価が可能となる測定・評価方法等を提供する。
【解決手段】
所定の入射角で、メタルイハライド光源12が測定対象の表面に光を照射する工程と、入射角に略等しい反射角に対応させた角度上で表面から反射される光をCCDカメラ15が受光し、反射光を光の強度の分布のデータに変換する工程と、そのデータに基づいて、表面の光の強度変化を指標として演算装置17が算出する工程とを有するものである。
(もっと読む)
平面分光器を用いた異種品検出装置
【課題】搬送される対象物を平面分光器を用いて、高い分解能で異種品の検出を可能とすること。
【解決手段】本発明では、搬送手段(11)と、近赤外線の照射手段(4)と、反射光を平面分光する平面分光手段(2)と、撮像手段(3)と、反射光のスペクトルデータを得て主成分分析手法を用いて異種品を検出する解析手段(5)とを備え、前記解析手段(5)は、前記スペクトルデータを平均化および標準化する前処理、波長軸平均化処理、ラグランジェ補間する補間処理、測定位置最適化処理、空間軸平均化処理、一次・二次微分および平滑化する変換処理、予め取得したローディングベクトルデータに基づいて主成分得点を算出する主成分得点算出処理、および異種品の判定を行う判定処理を行う。
(もっと読む)
デジタルカメラによる寸法測定方法
対象上の第1の検出可能点と第2の検出可能点との間の距離は、前記第1の検出可能点を有する第1の画像を作り、次に、カメラを移動させ、続いて、前記第2の検出可能点を有する他の画像を作ることによって、デジタルカメラを用いて測定される。画像上での検出可能点の座標が計算される。2又はそれ以上の重なり合う画像は、重なり合う画像の重複部分での対応する検出可能点が、カメラの移動を決定するために検出されると、カメラによって作られる。  (もっと読む)
(もっと読む)
ステージ装置及び露光装置
光学部材を備えた可動ステージの構造を複雑にすることなく、その光学部材の温度を制御できるステージ装置である。レチクル(R)を保持するレチクルステージ本体(22)をY軸リニアモータ(76A,78A,76B,78B)を用いてレチクルベース(16)上でY方向に駆動する。レチクルステージ本体(22)の端部の光学部材支持部(24B2)上の光学系(32)を介して、レチクルベース(16)上に固定された固定鏡(MX)に計測用レーザビームを照射して、レチクルステージ本体(22)のX方向の位置を計測する。光学系(32)の温度を安定化するために、光学部材支持部(24B2)の底面に空気層(35)を介してロッド部材(27)を固定し、ロッド部材(27)内に温度制御された冷媒を供給する。  (もっと読む)
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。 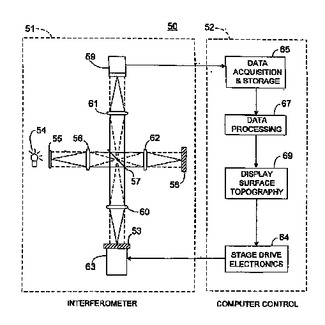 (もっと読む)
(もっと読む)
軸外干渉計測における誤差に対する補償
一般的に、第1の態様において、本発明の特徴は、ステージ上のアライメント・マークの箇所を決定するための方法であって、干渉計とミラーとの間の経路に沿って測定ビームを送ることであって、少なくとも干渉計またはミラーがステージ上に載置される、測定ビームを送ること、測定ビームを他のビームと組み合わせて、ステージの箇所についての情報を含む出力ビームを生成すること、出力ビームから、第1の測定軸に沿って、ステージの箇所x1を測定すること、第1の測定軸に実質的に平行な第2の測定軸に沿って、ステージの箇所x2を測定すること、ミラーの表面変化を異なる空間周波数に対して特徴付ける所定の情報から補正項Ψ3を計算することであって、補正項に対する異なる空間周波数からの寄与を、異なる仕方で重み付けする、補正項Ψ3を計算すること、第1の測定軸に平行な第3の軸に沿って、アライメント・マークの箇所を、x1、x2、および補正項に基づいて決定すること、を含む方法である。  (もっと読む)
(もっと読む)
機械部品の位置を検査するための装置および方法
【課題】機械部品の存在を検出するための装置、より具体的には、長尺工具の完全性を検査するための装置を提供する。
【解決手段】工具の完全性を検査するための装置は、レーザ光線(21)を用いる光電子検査機構(7)と、工具と光電子検査機構との間の相対的な移動を可能とする長手方向(X)に沿って移動可能な載置台(6)と、例えば送受波器(9、10)を含む前記相対的な位置を検査するための装置と、を備えている。光電子検査機構のセンサ(22)は、光線の遮光を検出する。この遮光時の送受波器の信号に基づき、これを既知の値と比較することによって、工具の完全性が検査される。載置台に連結された光電子検査機構の連結機構(24)は、横方向基準面に沿って光電子検査機構を振動させることができ、この振動により感知可能な画定領域(33)が画成される。振動はモータ(26)により制御され、光線の遮光はセンサにより検出されて、該センサにより工具の端部が感知可能な画定領域に干渉する瞬間が示される。  (もっと読む)
(もっと読む)
基準パターン抽出方法とその装置、パターンマッチング方法とその装置、位置検出方法とその装置及び露光方法とその装置
テンプレートマッチングのために有効な基準パターンを適切に効率良く抽出することのできる基準パターン抽出方法を開示する。本発明において、ウエハを撮像して得た画像情報上の観察視野(VIEW_Area)となり得る最大の範囲である最大視野範囲(OR_Area)内において、ユニークさが互いに異なり、かつ、その最大視野範囲(OR_Area)内に任意に配置される観察視野(VIEW_Area)内においてもユニークであると認識されるユニークなパターンを複数抽出する。そして、抽出されたユニークなパターンの全てを、観察視野(VIEW_Area)が取り得る範囲とは無関係に、基準パターン(テンプレート)として設定する。各ユニークパターンは、各々がユニークなパターンであるエレメント、又は、ほぼユニークなパターンであるエレメントの組み合わせにより表される。  (もっと読む)
(もっと読む)
パターン化ウェハまたは非パターン化ウェハおよびその他の検体の検査システム
パターン化と非パターン化ウェハの検査システムを提供する。1つのシステムは、検体を照明するように構成された照明システムを含む。システムは、検体から散乱された光を集光するように構成された集光器をも含む。加えて、システムは、光の異なる部分に関する方位と極角情報が保存されるように、光の異なる部分を個別に検出するように構成されたセグメント化された検出器を含む。検出器は、光の異なる部分を表す信号を生成するように構成されていてもよい。システムは、信号から検体上の欠陥を検出するように構成されたプロセッサを含むこともできる。他の実施形態におけるシステムは、検体を回転・並進させるように構成されたステージを含むことができる。1つの当該実施形態におけるシステムは、検体の回転および並進時に、広い走査パスで検体を走査するように構成された照明システムを含むこともできる。 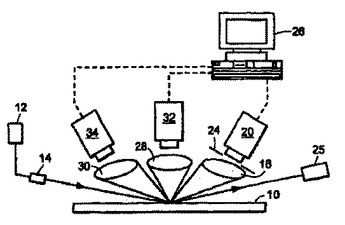 (もっと読む)
(もっと読む)
光学式走査装置及び欠陥検出装置
【課題】 欠陥の存在だけでなく試料表面の凹凸形状をに検出できる光分解能の光学式走査装置を実現する。
【解決手段】 光源1から試料4に向かう光ビームと試料から光検出器6に向かう反射ビームとを分離するビームスプリッタ2と、試料と光スポットとを相対的に移動させる手段とを具え、試料表面を光スポットにより走査し、試料表面からの反射光により試料の表面領域の情報を検出する光学式走査装置において、ビームスプリッタと光検出器との間の光路中に遮光板を配置し、試料表面における光スポットの走査方向と対応する方向の片側半分の光路を遮光する。遮光板を光路中に配置することにより、試料表面に欠陥の要因となる微小な傾斜面存在する場合、反射の法則により光スポットからの反射光は光軸から変位するので、遮光板により遮光される光量が変化する。この結果、光検出器からの出力信号により凸状欠陥及び凹状欠陥を判別することができる。
(もっと読む)
1,201 - 1,219 / 1,219
[ Back to top ]