
Fターム[2F065MM07]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874) | 直線移動 (522)
Fターム[2F065MM07]に分類される特許
201 - 220 / 522
タイヤの検査装置及びそれを用いたタイヤの検査方法
【課題】トレッド部の外面とトレッド部の内面とにおける構造上の相対位置を容易に検査しうる。
【解決手段】空気入りタイヤTを保持する支持台2と、該支持台2に保持された空気入りタイヤTの内腔側に配されかつタイヤ半径方向の光軸を有する可視レーザー光36をタイヤTのトレッド部42の内面42iに照射しうる内の照射器3と、支持台2に保持されたタイヤTの外側に配されかつ内の照射器3と同一の光軸を有する可視レーザー光をタイヤTのトレッド部42の外面42oに照射しうる外の照射器4と、支持台2に保持された空気入りタイヤTに対し、内の照射器3と外の照射器4とを同期させて相対移動させる移動手段5とを含む。
(もっと読む)
球状波面を使用した複雑な表面形状の測定

【課題】 内部円錐などの複雑な表面形状を測定するための干渉方法およびシステムを提供する。
【解決手段】局部球面測定波面(例えば、球面波面および非球面波面)を使用して、円錐表面(および他の複雑表面形状)を干渉法を使用して特性化することが可能である。詳細には、複雑表面形状は、測定点基準に対して測定される。これは、測定波面と基準波面の間に一定の光路長差(例えばゼロOPD)を生成するべく測定波面を反射する理論試験表面に対応する仮想表面(152)の曲率半径を変化させることによって達成される。
(もっと読む)
画像処理方法および顕微鏡装置
【課題】分解能を高めた画像処理方法を提供する。
【解決手段】物体を撮像装置に対して相対移動させながら当該撮像装置により得られた、物体の表面の複数の画像に基づく画像処理方法であって、複数の画像から物体の表面における同一箇所に該当する部分を抽出するとともに、当該抽出した部分の信号強度から物体の表面高さを求めて、表面高さの度数分布を求めるステップ(S101〜S102)と、度数分布に基づいて表面高さの確率密度関数を算出し、確率密度関数が最大となる表面高さを表面高さの真値として求めるステップ(S103)とを有している。
(もっと読む)
校正用治具、形状測定装置、及びオフセット算出方法
【課題】価格を低価格に抑えることが可能になると共に、高精度でオフセットを算出可能な校正用治具、形状測定装置、及び形状測定装置のオフセット算出方法を提供する。
【解決手段】校正用治具100は、基準球112と、基準球112を下方から支持し且つ基準球112が上方から照明された場合の光を正反射させる反射板111とを備える。また、校正用治具100は、反射板111上に形成され上面が平面を有する基準ブロック113を備える。基準球112の表面は、鏡面にて構成されている。
(もっと読む)
加工装置に搭載される被測定物の計測方法および計測装置
【課題】サブミクロンの精度を有する、加工装置に搭載される被測定物の計測方法および計測装置を提供する。
【解決手段】光源1と、この光源1からの光線を2本の光線に分岐する光分岐/合流部2と、被測定物10を設置するステージ部11と光を集光して照射する対物レンズ6と、前記2本に分岐された光線の他の一方が照射される参照ミラー5とを有し、前記被測定物10または前記参照ミラー5の位置を、それぞれ、前記被測定物10からの反射光Aの光軸方向または前記参照ミラー5からの反射光Bの光軸方向に移動させることにより、前記被測定物10からの反射光Aと前記参照ミラー5からの反射光Bの干渉波形を計測し、同時に移動量を計測可能なリニアスケール8の位置情報も計測して、前記参照ミラー5からの反射光Bの光路長と前記被測定物10からの反射光Aの光路長が同一となる位置を、左右対称性の評価式が最小になる位置を求めることで特定する。
(もっと読む)
検査条件決定方法、検査条件決定装置、外観検査機およびプログラム
【課題】カメラの撮影時の解像度を変更しながら部品の撮影を行なう外観検査機において、解像度の切り替えタイミングおよびカメラの移動経路を最適化する。
【解決手段】複数の解像度で基板上の部品を撮影し、前記部品の実装状態を検査する外観検査機における検査条件を決定する検査条件決定方法であって、前記部品の撮影時に要求される解像度は予め定められており、前記複数の解像度の各々について、当該解像度で撮影されるべき部品を含むように少なくとも1つの撮影領域を決定する撮影領域決定ステップ(S2、S4)と、前記撮影領域決定ステップで決定された撮影領域を巡回する最短の経路を決定する経路決定ステップ(S10)とを含む。
(もっと読む)
被測定物形状測定治具及び三次元形状測定方法
【課題】被測定物の表裏面の三次元測定を高精度かつ高速に行う。
【解決手段】レンズ20と基準球20A,20Bと基準平面30の三次元形状を表面側及び裏面側のいずれ側からでも表裏両面において測定可能な被測定物形状測定治具10を用いて、基準球20A,20Bの中心点座標と、基準平面30の平面の傾きと、レンズ20のR1面及びR2面のそれぞれの頂点座標Pr1,Pr2及び光軸L1,L2の方向を得て、R2面側測定データをY軸回りに180°回転させ、R1面側及びR2面側測定データを、例えば基準球20Aの中心点座標O1が一致するように平行移動させ、R1面に対するR2面の偏心d及び傾きθを求める。
(もっと読む)
被測定物形状測定治具及び三次元形状測定方法
【課題】被測定物の表裏面の三次元測定を高精度かつ高速に行う。
【解決手段】レンズ20と基準球20Aと基準円筒30の三次元形状を表面側及び裏面側のいずれ側からでも表裏両面において測定可能な被測定物形状測定治具10を用いて、基準球20Aの中心点座標と、基準円筒30の所定距離H離れた2点の断面により構成される円のそれぞれの中心点座標と、レンズ20のR1面及びR2面のそれぞれの頂点座標Pr1,Pr2及び光軸L1,L2の方向を得て、R2面側測定データをY軸回りに180°回転させ、R1面側及びR2面側測定データを基準球20Aの中心点座標Osが一致するように平行移動させ、R1面に対するR2面の偏心d及び傾きθを求める。
(もっと読む)
断面形状の測定装置と測定方法。
【課題】測定対象物に形成された穴の軸に垂直な断面形状を測定する技術を提供する。
【解決方法】断面形状測定装置10は、移動機構26と、回転機構38と、距離センサ12と、コンピュータ20によって第1測定手段を構成しており、第1位置X1において基準軸32の回りの断面形状(第1測定形状)を測定する。また、断面形状測定装置10は、移動機構26と、回転機構38と、距離センサ12と、コンピュータ20によって第2測定手段を構成しており、第2位置X2において基準軸32の回りの断面形状(第2測定形状)を測定する。コンピュータ20は演算手段を構成しており、第1位置X1と第2位置X2との間の所定距離Lと第1測定形状と第2測定形状に基づいて、測定対象物16に形成された穴34の軸に垂直な断面形状を測定する。
(もっと読む)
アームオフセット取得方法
【課題】簡単でしかも正確にアームオフセット取得が可能な、両面基板検査装置におけるアームオフセット取得方法を提供する。
【解決手段】第1及び第2測定ユニット10、20を備えた両面基板検査装置1におけるアームオフセット取得方法において、(a)第1測定ユニット10をX−Y座標の所定の位置に移動し、Z軸ユニット14の上下機構を駆動し、プローブ15をプロービング位置へと下降させ、(b)第2測定ユニット20の位置補正カメラ26を第1測定ユニット10のプローブ15と同じ座標位置に移動し、第2測定ユニット20の位置補正カメラ26によって、第1測定ユニット10のプローブ15の先端を撮影してその位置を検出し、理論値との誤差を数値化し、第1測定ユニット10のアームオフセット取得を行い、第2測定ユニット20に対しても同様のアームオフセット取得を行う。
(もっと読む)
高さ測定装置および高さ測定方法
【課題】光量過多によるノイズの影響を極力排する高さ測定装置および高さ測定方法を提供する。
【解決手段】電子部品17に向けて鉛直方向にレーザ光を投射するレーザ発振器10と、電子部品17の表面で反射したレーザ光を鉛直方向に対して異なる角度をなす位置でそれぞれ受光する15度PSDと35度PSDからなる3Dセンサ2において、電子部品17の反射特性に基づいて、15度PSDと35度PSDのうち受光量が過多とならない何れかのPSDを選択し、この選択したPSDから発せられた電気信号に基づいて電子部品17の高さを計測する。
(もっと読む)
画像認識装置及び画像認識方法
【課題】個々間で厚さにばらつきのある薄膜部材のパターンマッチングを安定して行うことができる画像認識装置及び画像認識方法を提供することを目的とする。
【解決手段】光源部8は波長の異なる照明光Lを選択的に切り換えて出射し、照明光学系9は光源部8から出射された照明光Lを認識マークM(薄膜部材)に導いてこれを照明する。制御部10は、光源部8から出射される照明光Lの波長を切り換えて異なる波長の照明光Lで認識マークMを照明しながらカメラ7eで認識マークMの撮像を行うとともに、認識マークMの撮像に用いている照明光Lの波長に応じた認識マークMのテンプレート画像を記憶部11から読み出し、撮像によって得られた認識マークMの画像と記憶部11から読み出したテンプレート画像とを比較してパターンマッチングを行う。
(もっと読む)
ワーク計測装置、衝突防止装置および工作機械
【課題】ワークと工作機械の一部との衝突を防止する際に用いるワーク形状の3次元データを容易に取得することができるワーク計測装置、衝突防止装置および工作機械を提供する。
【解決手段】加工対象であるワークを加工する工具が取り付けられる主軸に取り付けられ、非接触で前記ワークまでの距離を走査して測定する測定部15と、空間を多面体状に分割して形成された3次元メッシュ構造を生成し、測定された前記ワークまでの距離情報に基づいて、ワークの測定点座標を算出し、3次元メッシュ構造の一単位と対応するワークの位置を走査した回数に対する、算出した測定点が一単位に含まれる回数の比率が所定の閾値以上のときに、一単位は前記ワークの形状であるとして測定形状マップを作成する形状認識部23と、が設けられていることを特徴とする。
(もっと読む)
穴形状測定装置
【課題】ノイズ光成分を除去することで、内部から穴形状を撮像できない被検物体の光学的な形状測定を行うことができる穴形状測定装置を提供する。
【解決手段】穴形状測定装置を、光軸方向に延びるように形成された穴Hを有する被検物体80の当該穴Hから放射された光を集光する機能を有する対物レンズ20と、この対物レンズ20の射出瞳面若しくは当該射出瞳面と共役な面に配置され、被検物体80のうち、穴Hから放射された光線を通過させる開口部32、及び、穴H以外の部分から放射された光線を遮光する遮光部31を有する遮光部材30とから構成する。
(もっと読む)
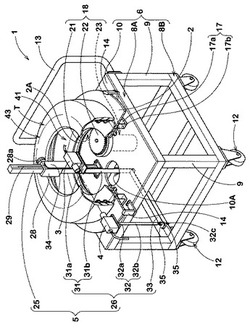
内周面測定装置
【課題】円の内径、真円度、周長を同時に算出でき、測定機器を回転させる必要がなく、自動化容易な内周面測定装置を提供する。
【解決手段】内周面測定装置は、軸方向における一方の端面を基準面12とし、基準面12が接するように円筒状の被測定部材である内輪1を載せるとともに、内輪1を回転させるターンテーブル2と、ターンテーブル2上における内輪1の位置を決めるためのシュー9と、内輪1の回転中心21から内輪1の内周面11までの距離を測定するレーザ測定器5とレーザ測定器5を内輪1の軸方向に移動させる測定器移動器6と、測定器移動器6の測定結果に基づき前記被測定部材内周面の内径、真円度および直角度を算出するマイコン7を備える。
(もっと読む)
レーザ回折干渉像による細管内面形状の評価方法及び該方法を用いた評価システム
【課題】本発明は、細管または貫通細孔の内面形状を非破壊的、且つ、簡易に評価することのできる新規な評価方法及び該方法を用いた評価システムを提供することを目的とする。
【解決手段】レーザ発散光を細管の内部に照射した際に細管の光軸方向後方に生じる回折干渉像について、直接光領域(L)の外側の陰影領域(S)に現われる微小な干渉縞の画像を抽出し、当該干渉縞の画像の光の強度を計測ラインに沿って計測する。光の強度の第1の極大値が計測された位置と第2の極大値が計測された位置との離間距離(ΔV)が撮像面20aと凸部30との離間距離Dとリニアな関係にあることを利用して、予め作成した校正データ(検量線)を用いて凸部30の位置を推定する。
(もっと読む)
膜厚計測装置、膜厚計測方法
【課題】透明樹脂フィルムを保持する保持部材の影響を受けることなく、透明樹脂フィルムに傷をことなく、誤計測がなく精度良く安定した透明樹脂フィルムの膜厚を計測する膜厚計測装置及び膜厚計測方法の提供。
【解決手段】保持部材に保持された透明樹脂フィルムの表面に検査光を照射し、前記透明樹脂フィルムの反射光を受光することで、前記透明樹脂フィルムの膜厚を計測する膜厚計測装置において、前記保持部材は、前記透明樹脂フィルムを保持する面がJISB0601−1994に準じて測定された、算術平均粗さRaが1.0μm〜8.0μm、最大高さRyが9.0μm〜50.0μmを有することを特徴とする膜厚計測装置。
(もっと読む)
3次元測定装置
【課題】光の反射率が異なる複数の測定対象部位を有する試料に対しても精度の高い測定を可能とする。
【解決手段】メモリ65には、試料30の第1及び第2の測定対象部位に応じた光量設定データを予め記憶されている。制御ユニット60の第1の画像取得制御部62は、第1の光量設定データで表される光量の光により、共焦点顕微鏡の各焦点位置で得られた各画像の中で輝度が最も高い画素のみが選択された画像を取得し、その画像をメモリ66に記録する。続いて、第2の画像取得制御部63は、第2の光量設定データで表される光量の光により、共焦点顕微鏡の各焦点位置で得られた各画像の中で輝度が最も高い画素のみが選択された画像を取得し、その画像をメモリ66に記録する。そして、3次元測定装置は、第1及び第2の画像取得制御部62,63により取得された画像から輝度が最大の画素が撮像されたときの焦点位置から第1及び第2の測定対象部位の高さを算出する。
(もっと読む)
中空体内面の検査方法および装置
【課題】検査するタイヤ12のサイズ等に変更があっても、撮像時におけるタイヤ12内面の照度を略均一化する。
【解決手段】第2移動手段47によるエリアカメラ46の移動時において、光源40がエリアカメラ46と一体的に移動するので、検査するタイヤ12のサイズが異なっても、光源40は撮像時にタイヤ12の内部でその内周面から半径方向内側に一定距離だけ離れた照射位置Cに常に位置することになる。この結果、撮像時における光源40からタイヤ12内面までの距離が略一定となり、検査精度が効果的に向上する。
(もっと読む)
三次元形状計測方法および三次元形状計測装置
【課題】測定対象物の表面の反射率の大きさや計測環境の照明の明るさ等にかかわらず、光切断線の撮像画像において光切断線を確実に抽出することができ、露出についてロバストな自動制御に対応することができる三次元形状計測方法を提供すること。
【解決手段】光切断法による三次元形状計測方法において、二次元画像の画像データに基づき輝度ヒストグラムを作成し、この輝度ヒストグラムにおける、光切断線の部分に対応する第一のピークPe1および背景部分に対応する第二のピークPe2を検出し、これらのピークPe1、Pe2についてのピーク間輝度値差(Bp1−Bp2)を算出し、ピーク間輝度値差が、予め設定された最小ピーク間輝度値差Br1以上であり、かつ、高輝度側となる第一のピークPe1における輝度値(第一ピーク輝度値Bp1)が、予め設定された最大ピーク輝度値Br2以下となるように、光切断線の撮像に際しての露出の調整を行う。
(もっと読む)
201 - 220 / 522
[ Back to top ]