
Fターム[2F065MM07]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874) | 直線移動 (522)
Fターム[2F065MM07]に分類される特許
121 - 140 / 522
検査装置
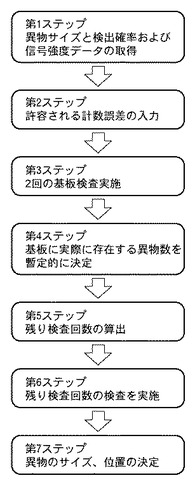
【課題】設定された精度の検査結果を得るのに要する時間の点で有利な検査装置を提供する。
【解決手段】異物または欠陥としての不具合に関して物体を検査する検査装置は、光を照射された物体からの光を検出し、当該光の強度が閾値を超えた前記物体上の位置を示す信号を出力する検出部と、前記物体上の位置に異物または欠陥としての不具合が存在することを示す情報を出力する制御部と、前記物体上の位置に前記不具合が存在する確率を示す情報を記憶する記憶部と、前記不具合の検査漏れの数に対する上限値を示す情報を入力する操作部と、を備える。前記制御部は、前記検出部に既定回数(少なくとも1回)前記検出を行わせ、推定された総数と前記記憶部に記憶された情報が示す前記確率とに基づいて、決定された全回数から前記既定回数を減じた残り回数の前記検出を前記検出部に行わせる。
(もっと読む)
ビード検査方法及びビード検査装置

【課題】検査対象の大きさに関わらず、非破壊でビードののど厚を算出可能なビード検査方法及びビード検査装置を提供する。
【解決手段】ビードBの品質を検査するビード検査工程S1及びビード検査装置1であって、ビード検査装置1は、ろう付けワイヤWの供給速度を計測するワイヤ供給速度計測装置11と、第一母材M1、第二母材M2、及びビードBの表面の位置座標データを計測し、解析する解析部12とを具備し、ろう付け前に第一形状データを計測する第一形状データ計測工程S10を行い、ろう付け後に第二形状データを計測する第二形状データ計測工程S30を行い、第一形状データ、第二形状データ、及びろう付けワイヤWの供給速度に基づいて、特徴量の予測値を算出する特徴量算出工程S40を行い、特徴量の実測値と、のど厚の実測値とに基づいて作成される回帰式によってのど厚の予測値を算出するのど厚算出工程S50を行う。
(もっと読む)
光学測定システム
光学測定装置は、固定された主軸台(57)が取り付けられた基準支持体(40)、ならびに、固定された主軸台に対向し、および測定される部品を主軸台(57)と心押し台(60)との間で維持するために主軸台(57)に近づいてくる、またはそこから離れて移動するための線形軸(x)に沿って移動可能である、移動可能な心押し台(60)、ならびに線形軸(x)に沿って移動可能な可動式往復台(100)を含むものであって、往復台は、コリメート光束が測定中の部品によって遮られるようにx軸を横切って方向付けるための光源(110)を担持し、往復台は、光源(110)に配列され、および測定中の部品によって遮られなかったコリメート光束の残留光を受けるように配置されている光学検出器(120)を、さらに担持する。測定装置は、光学往復台(100)および心押し台(60)が摺動可能に係合されている基準支持体(40)上に固定されている直線状ガイド(47)を有するのに対し、主軸台(57)は、基準表面上に固定され、少なくとも一部が前記直線状ガイド(47)上に懸下している主軸台担持部(50)上に設置されている。  (もっと読む)
(もっと読む)
板厚分布の測定方法
【課題】安価な2軸スライダーを用いて、高精度に(半)透明基板の板厚分布を測定する方法を提供する。
【解決手段】(半)透明基板の一方の面から光を入射し、表面と裏面の反射位置を検出して板厚を測定する変位センサ−を用いた板厚分布を測定する方法であって、変位センサーの周辺に少なくとも3個のセンサーを配置し、これらのセンサーは、変位センサーと(半)透明基板との位置関係を測定して、(半)透明基板に対する変位センサーの位置及び姿勢を一定に制御しながら(半)透明基板の板厚分布を測定する方法であり、半透明基板における測定においては、半透明基板に接した、液体層を介して板厚の測定を行う。
(もっと読む)
管内スケール計測装置及び計測方法
【課題】管内スケールがポーラスなスケールの場合であってもスケールの高精度な計測を可能とし、かつスケールの厚さも正確に計測可能とした管内スケール計測装置及び計測方法を提供することを課題とする。
【解決手段】ボイラ管101の内部に回転可能に設けられた回転体1と、回転体1の内側に設置されて該回転体を回転するモータ3と、回転体1の外周に設けられて該回転体とともに回転する機器台板10と、該機器台板10上に取り付けられてボイラ管101の内周のスケール付着部101bに向けてレーザ光を発振する発信器11と、スケール付着部101bに向けて発振されたレーザ光33の反射波を受信する受信器13と、回転体1及び機器台板10を管軸方向に移動せしめる軸方向移動機構を備え、発信器11及び受信器13を機器台板10及び回転体1とともにボイラ管101の中心軸周りに回転可能に設置したことを特徴とする。
(もっと読む)
外観検査装置及び外観検査方法
【課題】検査ウインドウを自動的に精度よく設定する。
【解決手段】外観検査装置10は、基板と該基板に実装されている部品とを備える被検査体12を撮像して得られる被検査体画像を使用して被検査体12を検査する。外観検査装置10は、被検査体12にパターンを投射する投射ユニット26と、パターンが投射された被検査体12のパターン画像に基づいて被検査体12の表面の高さ情報を生成する高さ測定部32と、高さ情報を用いて特定される被検査体画像上での部品の配置に基づいて被検査体画像に検査ウインドウを設定する検査データ処理部34と、を備える。
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
形状測定装置
【課題】被検物の三次元形状を測定する際に必要なメモリの容量を効率的に削減する。
【解決手段】形状測定装置において、ステップS5において、スポット光の照射位置が変化したと判定され、ステップS6において、過去にデータセットを記録した照射位置でないと判定された場合、測定データ、中間データおよび測定用画像データを含むデータセットを記録する。また、スポット光の照射位置が変化したか否かに関わらず、ステップS7において、現在のスポット光の照射位置でまだN回データセットを記録していないと判定された場合、データセットを記録し、すでにN回データセットを記録していると判定された場合、データセットを記録しない。本発明は、例えば、三次元形状測定装置に適用できる。
(もっと読む)
物体表面の高さマップを求める方法及びその装置
【課題】より高い速度で物体表面の高さマップを求める方法および装置を提供する。
【解決手段】物体表面の高さマップを求める方法であって、光源の光軸方向に沿って、物体表面に対し対物レンズの焦点面を走査するステップと、その走査中に、前記光軸に垂直な方向に周期性を有する周期的パターンを当該光軸の垂直方向に移動させながら、当該周期的パターンが付与された光を対物レンズを通じて物体表面に照射するステップと、光検出器により前記物体表面で反射した前記光を検出するステップと、その光検出器で検出した光の強度の振幅が最大となる走査位置を特定するステップと、その光の強度の振幅が最大となる走査位置から物体表面の高さを求めるステップと、を有する。光を検出するステップでは、複数の走査位置で当該各走査位置毎に一回ずつ光が検出される。走査の速度と、周期的パターンの位相の移動速度が一定の関係を有する。
(もっと読む)
画像表示装置
【課題】 投射レンズの光軸と、スクリーンの法線の傾きを精度よく検出し、調整者にわかりやすく傾き情報を伝達することができる画像表示装置を得ること。
【解決手段】 画像表示素子と、該画像表示素子により表示された画像をスクリーン上に投射する投射レンズと、該スクリーン上あるいは該スクリーンと同一平面上であって、該投射レンズの光軸と直交する第1方向で該投射レンズの光軸を挟んだ2つの測距点と、該投射レンズの光軸と直交し、該第1方向と直交する第2方向において、前記2つの測距点とは位置が異なる1つの測距点の、少なくとも3つの測距点の距離情報を各々検出する少なくとも3つの距離測定手段と、該3つの距離測定手段で得られる距離情報を表示する表示手段とを備えた画像表示装置であって、該3つの距離測定手段の光軸は、該投射レンズの光軸に対して、同じ角度だけ異なる方向に傾けて配置されていること。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
面形状計測装置
【課題】面形状計測装置における計測ヘッドの小型化および軽量化に有利な技術を提供する。
【解決手段】被検面の形状を計測する面形状計測装置は、基準点から光を放射し被検面で正反射して戻ってくる被検光を検出することによって前記被検面から前記基準点への法線の方位を計測するための計測ヘッドと、前記計測ヘッドを走査する走査機構と、前記計測ヘッドを使って計測された法線の方位と前記基準点の位置とに基づいて前記被検面の形状を計算する処理部とを備え、前記処理部は、前記基準点の座標を(s,t,u)、前記被検面から前記基準点への単位法線ベクトルを(α,β,γ)、前記被検面上の点の座標を(x,y,z)、q0を定数としたときに、(x,y,z)=(s,t,u)−q(α,β,γ)q=q0+∫(αds+βdt+γdu)に基づいて前記被検面の形状を計算する。
(もっと読む)
面形状計測装置
【課題】高精度な面形状計測に有利な面形状計測装置を提供する。
【解決手段】被検面の形状を計測する面形状計測装置では基準点から光を放射し被検面で正反射して戻ってくる被検光を検出することによって、前記基準点と前記被検面との間の距離または前記被検面から前記基準点への法線の方位を計測する計測ヘッドと、前記計測ヘッドを走査する走査機構と、前記計測ヘッドを使って計測された前記距離または前記方位と、前記基準点の座標と、に基づいて前記被検面の形状を計算する処理部とを備え、前記処理部は、前記走査機構によって前記計測ヘッドを走査経路に沿って走査しながら前記計測ヘッドを使って前記距離または前記方位を計測した結果に基づいて、前記被検面の形状を計算する際に用いられる前記基準点の座標を校正し、前記被検面の面形状を計測する際は、校正時における前記走査経路と同一の経路に沿って前記走査機構によって前記計測ヘッドが走査される。
(もっと読む)
空調装置
【課題】ダンパーの開口率を安価な設備で測定する空調装置。
【解決手段】吹き出しグリル11の風上側にダンパー12を備えた吹き出し口装置1と、吹き出しグリル11の風上側に設けられた反射鏡15と、ダンパー12の風上側に配置された光学測定ユニット2と、光学測定ユニット2に設けられ、ダンパーの開口12e1の最大開口幅の1/2以上の幅を有する平行光線4を、反射鏡15に垂直に投射する投光器27と、光学測定ユニット2に設けられ、平行光線4が開口12e1を通過して反射鏡15により反射された反射光4aの強度を測定する光検知器25と、平行光線4が吹き出し口装置1の開口121e1を通過する位置に光学測定ユニット2を移動する移動手段5とを有し、反射光4aの強度に基づきダンパー12の開口率を算出する。
(もっと読む)
鋳型の平面度測定方法
【課題】 鋳型の平面度を精度良く測定することが可能で、特に凹凸のある鋳型の平面度を高精度に測定する方法を得る。
【解決手段】
鋳型の上方に配設したレーザ測長器から、レーザを鋳型の平面に反射させてレーザ測長器と鋳型表面の距離を測定する鋳型平面度の測定方法であって、凹凸のある鋳型の平面度を測定する場合には、鋳型の凹部の底面に、前記レーザ測長器へのレーザの反射光の検知が可能な高さのレーザ反射部材を載置して、前記レーザ測長器からのレーザを前記レーザ反射部材に照射させてレーザ測長器と反射部材の距離を測定して鋳型の平面度を測定する。
(もっと読む)
トンネルデータ処理システムおよびトンネルデータ処理方法
【課題】 GPSが利用できないトンネル内において、距離メータなどの機械的計測により得た入力データに対してGPSや距離メータ等に起因する誤差を正確に補正する。
【解決手段】 走行する車両に搭載された距離メータやジャイロ装置などの位置検知手段210により測定した原座標系の位置データと、車両に搭載された壁面検知手段120により位置データと同期させた原座標系のトンネル内面点群データをデータ入力部120を介して入力する。入口被検知板310に関するGPSでの計測データと既知の位置データの差分からGPSの誤差を補正し、出口被検知板320に関する距離メータの計測データと既知の位置データの差分からトンネル内で距離メータの誤差により蓄積したトンネル内計測誤差の総計を算出し、キロポスト上の任意の点に対してはトンネル内計測誤差を按分して補正する。
(もっと読む)
表面粗さ測定装置及び表面粗さ測定方法
【課題】坏被測定物の製造ライン中に組み込んで使用することが可能である表面粗さ測定装置を提供する。
【解決手段】被測定物10を載置する載置板5と、載置板5に被測定物10を載置したときの被測定物10の中心軸を中心にして被測定物10の周囲を回転する回転運動、及び被測定物10の中心軸方向に移動する直線運動の両方の動きをすることができるとともに、回転運動と直線運動とを合わせた動きをすることができる、被測定物10の表面粗さを測定するレーザー変位計4とを備え、レーザー変位計4で被測定物10の表面粗さを測定するときに、レーザー変位計4のスキャンスピードV(m/秒)と、レーザー変位計のサンプリング間隔X(秒)との関係が、下記式(1)を満たす関係となる表面粗さ測定装置。
V×X≦4×10−6(m)・・・(1)
(もっと読む)
三次元測定システムおよび三次元測定方法
【課題】三次元形状を測定する三次元測定の作業性を改善できる技術を提供する。
【解決手段】複数の識別点が設けられた対象物の三次元形状のうち第1領域に第1検出光および第2検出光を時間的に順次に投光する検出光投光手段と、検出光投光手段からの投光によって照明された第1領域の画像を撮影する画像撮影手段と、第1検出光が投光されたときの画像に基づいて第1領域の三次元形状を表現した三次元形状データを取得する形状取得手段と、第2検出光が投光されたときの前記画像に基づいて第1領域に設けられた複数の着目識別点のそれぞれの位置を表現した第1位置データを取得する位置取得手段と、前記第1位置データに基づいて、前記複数の着目識別点のそれぞれの位置を示す第1位置指示光を前記対象物に向けて投光する指示光投光手段を備える。
(もっと読む)
3次元データ生成装置、3次元データ生成方法およびプログラム
【課題】ステレオ画像から比較的簡易に2枚の画像の対応点を求める3次元データ生成装置、3次元データ生成方法およびプログラムを提供する。
【解決手段】画像データ入力部2は、異なる位置から所定の領域を撮影した2つの画像の画像データを取得する。位置指定部3は、2つの画像データのそれぞれの画像で、1つの構造物の領域に含まれる画像上の指定点を取得する。閉領域抽出部4は、2つの画像データのそれぞれの画像で指定点を含み、指定点との色の差が所定の範囲であって連続する画素の集合である閉領域を抽出する。外形ベクトル生成部5は、2つの画像のそれぞれで抽出した閉領域の輪郭に沿って一巡する外形ベクトルを抽出する。3次元データ計算部7は、2つの画像データのそれぞれの外形ベクトルが同じ構造物の外形に対応するとみなして、2つの画像データからその構造物の外形の3次元の位置座標を算出する。
(もっと読む)
分岐器検査装置
【課題】簡易な構成で一律の安定した精度で測定することができる操作性に優れた分岐器検査装置を提供する。
【解決手段】軌道上を走行可能な台車21と、台車21の走行距離を測定する距離センサ25と、測定対象物の形状を測定するレーザ式変位センサ29と、レーザ式変位センサ29を測定対象側レール11の軌間測定点Pの鉛直線上に常に位置させるスライドガイド27と、測定制御装置40とを有する。測定制御装置40は各測定位置情報、測定情報を記憶する基本データ記憶部、測定データ記憶部、入力部、表示部及び制御部を備える。制御部は台車21の走行距離が測定位置情報に一致した時に測定情報、走行距離を表示部に表示させ、入力部からの入力によりレーザ式変位センサ29を作動させて測定を行わせ、測定データを表示部に表示させると共に測定データ記憶部に格納する。
(もっと読む)
121 - 140 / 522
[ Back to top ]