
Fターム[2F065MM07]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874) | 直線移動 (522)
Fターム[2F065MM07]に分類される特許
101 - 120 / 522
画像測定装置及び画像測定方法
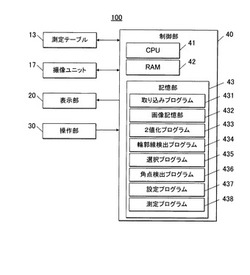
【課題】操作者の手間が少なく、測定を迅速且つ確実に行うことのできる画像測定装置及び画像測定方法を提供する。
【解決手段】ワークを撮像する撮像ユニット17と、撮像されたワークの画像を取り込む取り込みプログラム431と、取り込まれた画像を2値化する2値化プログラム433と、2値化された画像内に存在する図形情報を認識し、当該図形情報の輪郭線を検出する輪郭線検出プログラム434と、検出された輪郭線に基づいて図形情報の角点を検出する角点検出プログラム436と、検出された角点を含む輪郭線上に、エッジ検出ツールを設定する設定プログラム437と、設定されたエッジ検出ツールにより、図形情報の測定を行う測定プログラム438と、を備える。
(もっと読む)
形状検査装置及び形状検査方法

【課題】一度のスリット光の走査により、任意の断面線における断面形状を検査することができる形状検査装置及び形状検査方法を提供する。
【解決手段】撮像光学系12を用いて被検査物20の形状を検査する形状検査装置10であって、被検査物20にスリット光を投射する投射手段13と、スリット光の走査により被検査物20上に順次形成される形状線を撮像する撮像手段14と、順次形成された各形状線の撮像データに基いて、被検査物20の三次元形状を点群データとして取得する点群データ取得手段と、点群データに基いて表示された被検査物に、入力に応じて切断線を設定する切断線設定手段と、切断線に対応した点群データにより、切断線における被検査物20の断面形状を算出する断面形状算出手段とを備えている。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】簡便な光源を利用した場合であっても光の反射による外乱の影響を抑えて光透過性薄膜の厚さを確実に算出できるようにする。
【解決手段】光透過性薄膜102の表面にレンズが合焦した状態では基板101の表面をフォーカスアウトさせて基板101から反射される光が合焦判定の外乱として作用することを防止する一方、基板101の表面にレンズが合焦した状態では光透過性薄膜102の表面をフォーカスアウトさせて光透過性薄膜102から反射される光が合焦判定の外乱として作用することを防止し、基板体100の平面上の同一箇所(xi,yi)で光透過性薄膜102を含めた基板体100の厚さと光透過性薄膜102を除いた基板101のみの厚さの差分に基いて光透過性薄膜102の厚さを適切に算出する。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】
ヘッド先端部に接触センサを搭載し欠陥との接触によりこれを検出する方法によっては、欠陥検出時に欠陥を引きずりウエハ表面に傷をつける可能性がある。
【解決手段】
試料の表面に照明光を照射するプリスキャン照射工程と、散乱光を検出するプリスキャン検出工程と、該散乱光に基づき該試料の表面に存在する所定の欠陥の情報を得るプリスキャン欠陥情報収集工程と、を備えるプリスキャン欠陥検査工程と、該試料の表面と近接場ヘッドとの距離を調整して該試料の表面を照射する近接場照射工程と、近接場光応答を検出する近接場検出工程と、該近接場光に基づき所定の欠陥の情報を得る近接場欠陥情報収集工程と、を備える近接場欠陥検査工程と、該所定の欠陥の情報をマージして該試料の表面に存在する欠陥を検査するマージ工程と、を有する試料の表面の欠陥検査方法である。
(もっと読む)
電線の異常検出方法、異常検出装置、および異常検出プログラム
【課題】例えば自走式電線点検装置を使用したビデオ映像に適した処理を行う。
【解決手段】撚られた複数の素線が表面に露出している電線に沿って撮像手段を移動させながら撮影した電線の複数の連続画像に基づいて電線の異常を検出する異常検出方法において、複数の連続画像4のうち、1枚の基準画像中の基準となる素線境界の位置情報及び素線の幅情報の入力を受け付け記憶する初期値設定処理(ステップS43)と、連続画像の各々について素線の境界を検出して素線表面画像を切り出す画像切り出し処理(ステップS44,S45)と、素線表面画像中の素線の表面の明るさの変化に基づいて素線の異常を検出する異常検出処理(ステップS46〜S48)を備えている。
(もっと読む)
車輪形状測定装置
【課題】作業員の技量にかかわらず短時間で精度高く車輪外周面形状を測定することが可能な車輪形状測定装置を提供する。
【解決手段】車輪1におけるフランジ及び踏面を含む外周面2の形状を測定する車輪形状測定装置100であって、筐体(基部)10と、該筐体10内に取り付けられて車輪1の径方向外側から車輪1の外周面2に向かって光線を照射し、その反射光によって該外周面2までの距離を検出する距離測定部30と、筐体10を車輪1に対して位置決めして固定する位置決め手段20と、距離測定部30を筐体10に対して車輪1の軸線O方向にスライド移動可能とさせるスライド手段40と、外周面2における光線の反射にて生じる乱反射光を吸収する乱反射光吸収手段60とを設ける。
(もっと読む)
円筒状ワークの寸法測定装置
【課題】円筒状ワークの外径寸法を、迅速かつ正確に取得することが可能な円筒状ワークの寸法測定装置を提供することを目的とする。
【解決手段】測定対象となる円筒状ワークWの中心軸線と平行に配置された固定軸Pと、該固定軸Pの径方向に離間して平行に配置され、固定軸Pを中心とした円の周方向に回動可能とされた可動軸Qと、可動軸Pと固定軸Qとの対向方向に延びる基準直線l上における円筒状ワークWによる遮蔽距離を検出する距離センサ50とを設ける。
(もっと読む)
非接触形状測定装置
【課題】測定ワーク側に別部品の反射手段を設置する必要がなく且つ微小な測定ワークの内面も測定可能な非接触形状測定装置を提供する。
【解決手段】X軸と平行なレーザー光Lをプローブ8よりクランク状に折り曲げるため、レーザー光Lを折り曲げるための別部品を必要とせず、プローブ8をそのまま測定ワーク1の内面の内部に挿入するだけで、測定ワーク1の内面形状が測定可能となる。プローブ8を小さくすれば微小な測定ワークの内面も測定可能となる。
(もっと読む)
ワーク識別装置
【課題】 コンベアに投入される多品種のワークを誤りなく識別するための識別装置及び識別方法の提供。
【解決手段】 本発明の識別装置は、ワーク(4A)の表面までの距離を計測する計測装置(8A)と、その計測装置(8A)をワーク(4A)の長手方向に移動させる移動装置(10A)と、これらを制御する制御装置(14A)とを有しており、前記ワーク(4A)には所定領域に種類を判別するため浮き出し文字(22A)が印字されており、前記制御装置(14A)は、計測装置(8A)を移動装置(10A)により移動させながらワーク(4A)表面までの距離を計測し、計測装置(8A)で計測されたワーク(4A)の所定領域における浮き出し文字(22A)による隆起の有無とその位置及び形状を特定し仕様の照合を行って種類・仕様の判断をする制御機能を有する。
(もっと読む)
3次元形状測定装置
【課題】MEMSミラーを用いてレーザ光を走査する3次元形状測定装置において、使用開始から長期間が経過してもミラーの回転角度を精度よく取得でき、測定精度を一定に保つことができるようにする。
【解決手段】
回転可能に支持されたミラー14aと供給される電気信号に応じてミラー14aを回転させて変位させる駆動回路とが一体的に形成された第1ミラー14を設ける。ミラー14aは、それぞれレーザ光を反射可能な第1反射面及び第2反射面を有する。第1反射面に測定装置と測定対象物OBとの距離を測定するためのレーザ光を照射する。第2反射面にミラー14aの回転角度を検出するためのレーザ光を照射する。第2反射面からの反射光を受光する受光センサ26を設ける。受光センサ26における反射光の受光位置からミラー14aの回転角度を計算するミラー角度検出回路42を設ける。
(もっと読む)
光波干渉測定装置
【課題】回転対称な線織面で構成される被検面の形状等を短時間で測定することが可能な光波干渉測定装置を得る。
【解決手段】回転軸R2回りに回転せしめられる被検レンズ9の被検面(コバ部表面95、嵌合面98、嵌合部底面99)に対し、顕微干渉計1から測定光軸Lに沿って収束しながら進行する低可干渉性の測定光を照射し、被検面の回転位置毎に対応した各回転位置別干渉縞を第1撮像カメラ24の1次元イメージセンサ23により撮像する。この各回転位置別干渉縞の画像データに基づき被検面の形状が解析される。
(もっと読む)
基板検査装置
【課題】オフセット量を正確かつ容易に取得する。
【解決手段】第1の位置情報に基づいて特定される位置Ob上にビーム照射部が位置するように移動させた後に、照射部をX方向(矢印A1,A2の向き)に移動させながらレーザービームを照射させたときのレーザービームの反射光量の変化、およびY方向(矢印B1,B2の向き)に移動させながら照射させたときの反射光量の変化に基づいてマーク21の位置Mx1,Mx2,My1,My2を取得すると共に、位置Mx1,Mx2,My1,My2と、第2の位置情報とに基づいて基板保持機構によって保持されているオフセット量取得用基板におけるマーク21の位置Mbを特定し、位置Mb,ObのX方向に沿った位置ずれ量Xb、およびY方向に沿った位置ずれ量Ybを、照射部のX方向に沿った移動量、およびY方向に沿った移動量をそれぞれ補正するためのオフセット量として特定する。
(もっと読む)
長寸法測定装置
【課題】使い勝手の良い長寸法測定装置を提供すること。
【解決手段】長寸法測定装置1は、試料2が載置し、配置位置が固定されている試料台10と、試料2に形成されたパターンに照明光を照射する照明ユニット20と、照明光から得られたパターンの像を撮像する撮像ユニット30と、試料台10の平面度を調整し試料台10を支持する平面度調整機構12と、エアを試料台10に送気し、試料台10からエアを吸引する送気吸引部16と、試料台10にて浮上している試料2に吸着する吸着機構40と、撮像ユニット30をZ方向に移動させるZステージ51と、撮像ユニット30をX方向に移動させるXステージ52と、吸着機構40を介して試料2をY方向に移動させるYステージ53と、試料2に形成されたパターン上の2点間の距離を測定する干渉測定ユニット60とを具備している。
(もっと読む)
赤外線分析装置
【課題】拡散性を抑制する光学系を用いて低水分から高水分にわたって高精度の測定が可能な水分計を提供する。
【解決手段】光源から出射した光を斜め方向から被測定物に照射し、該被測定物を透過した透過光をなだらかな曲率を有するミラーで反射させて集束し、再度前記被測定物を透過させて赤外線に感度のある検出器に入射させるように構成した。
(もっと読む)
形状測定装置
【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物をライン光で照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータ17と、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28とを備え、振れ検出部28に検出された振れに基づいて測定の補正を行うようになっている。
(もっと読む)
物体表面傷の計測方法
【課題】物体表面に摩耗や撓み等が存在する場合、表面上に障害物が存在するような場合に1回の計測範囲を超える長さに渡って計測する場合においても物体表面の傷を高精度で測定することが可能な物体表面傷の計測方法を提供する。
【解決手段】物体3の両端間に部材2を設け水平板6を押しつけて変形硬化させ、水平板を取り外し物体両端と部材表面とを結ぶ基準線を設定し、計測器を設置し、計測器を基準線に沿って移動させ物体表面までの距離を測定して傷の分布を示す第1の計測データを取得し、計測器を次の計測範囲内に設置し、計測器を移動させ物体表面までの距離を測定して第2の計測データを取得し、第1の計測データと第2の計測データとを連結させたデータを取得する。
(もっと読む)
タイヤ形状計測装置
【課題】実際に路面上でタイヤが転動状態にあるときのトレッド部のブロックの変形状態を正確に測定することができるタイヤ形状計測装置を提供する。
【解決手段】カメラユニット13は、クロスローラリング(ベアリング)を備えた連結手段17を介して、車輪を転動可能にして車輪の車軸に取り付けられ、車輪を構成するタイヤ11のブロック部を撮像する。レーザ変位計21は、路面との距離を測定する。リニアアクチュエータ22は、レーザ変位計21の測定結果を用いて、カメラユニット13と路面との距離を一定に保つ。
(もっと読む)
ワイヤロープピッチの測定方法とワイヤロープピッチ測定装置およびワイヤロープの製造方法
【課題】ワイヤロープのピッチを正確に測定することのできるワイヤロープピッチの測定方法とワイヤロープピッチ測定装置を提供し、さらに、ワイヤロープピッチに関する品質不良の発生を抑制できるワイヤロープの製造方法を提供する。
【解決手段】ワイヤロープ30の側面に対向させたレーザ変位センサを用いて、ワイヤロープの径方向断面に沿ってワイヤロープ30の側面にレーザ光32を照射して該側面の変位の計測を行いつつ、レーザ変位センサをワイヤロープ30の長さ方向に相対移動させ、レーザ変位センサのワイヤロープ30に対する前記長さ方向の相対位置と前記変位の計測値との関係から前記ワイヤロープのピッチを算出する。
(もっと読む)
部品位置の計測装置及び計測方法
【課題】蒸気タービンの構成部品位置を計測する際に、計測用の冶具の製作や取り付け等の手間が不要であり、構成部品位置を直接計測することで測定精度並びに信頼性の高い計測が可能な部品位置の計測装置及び計測方法を提供する。
【解決手段】レーザ光3を照射するレーザ発振器1と、レーザ発振器1からのレーザ光3の照射方向に沿って走行することが可能な装置本体5と、装置本体5に設けられ、レーザ光3を所望の角度へ屈折して照射する光学部品と、装置本体5に設けられ、光学部品により屈折され照射されたレーザ光3が構成部品により反射されたレーザ反射光の受光量を検出する受光素子8とを備える。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
101 - 120 / 522
[ Back to top ]