
Fターム[2F065MM07]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874) | 直線移動 (522)
Fターム[2F065MM07]に分類される特許
141 - 160 / 522
凹凸形状を抽出するための画像処理方法及び画像処理装置
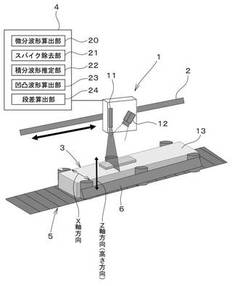
【課題】縦振動を引き起こしている状況下でも、凹凸形状を精度高く読取ることができるようにする。
【解決手段】凹凸形状が施され且つ該凹凸形状の凹凸方向に沿った振動を起こしている刻印面から、凹凸形状を抽出するための画像処理方法であって、刻印面に対して一方向に走査することで、凹凸形状の高さデータを有する2次元形状データを取得する走査ステップと、高さデータの変化度合いを求めるために、2次元形状データを微分する微分ステップと、微分ステップの結果を基に、2次元形状データから高さデータの変化度合いが急峻なものを除去するスパイク除去ステップと、スパイク除去ステップの結果を積分して振動波形を推定する積分ステップと、2次元形状データから、積分ステップで推定した振動波形を減じることで凹凸形状に相当する刻印波形を算出する凹凸検出ステップとを有する。
(もっと読む)
蛍光発光を使用するガラス容器壁厚測定

【課題】ガラス容器中の応力曲線に加えて応力層の厚さおよび壁厚の両者を迅速かつ正確に確定するために蛍光発光を使用する、ガラス容器壁中の応力および壁の厚さを測定するための装置および方法が開示される。
【解決手段】本装置および方法を、ガラス容器の全周囲にわたるガラス容器側壁中の応力および側壁の厚さの両者を迅速かつ正確に測定するために使用することができる。本装置および方法は、大規模ガラス容器製造に適合され、ガラス容器の側壁中の応力および側壁の厚さの高速測定が可能である。
(もっと読む)
環境認識システム、環境認識方法およびロボット
【課題】ロボット等の装置の周辺に存在する物体の位置、姿勢および形状等、当該物体を対象とする当該装置の動作のために必要な情報を高精度で認識することができるシステム等を提供する。
【解決手段】本発明の環境認識システムによれば、3次元画像センサ11および2次元画像センサ12のそれぞれのカメラパラメータを用いて、被写体の3次元情報および物理情報(色情報など)が対応付けられる。その結果、ロボットRの周囲にある被写体に関する位置、姿勢および形状、ならびに、被写体の物理情報が取得される。
(もっと読む)
分岐器検査装置
【課題】簡易な構成で一律の安定した精度で測定することができる操作性に優れた分岐器検査装置を提供する。
【解決手段】軌道上を走行可能な台車21と、台車21の走行距離を測定する距離センサ25と、測定対象物の形状を測定するレーザ式変位センサ29と、レーザ式変位センサ29を測定対象側レール11の軌間測定点Pの鉛直線上に常に位置させるスライドガイド27と、測定制御装置40とを有する。測定制御装置40は各測定位置情報、測定情報を記憶する基本データ記憶部、測定データ記憶部、入力部、表示部及び制御部を備える。制御部は台車21の走行距離が測定位置情報に一致した時に測定情報、走行距離を表示部に表示させ、入力部からの入力によりレーザ式変位センサ29を作動させて測定を行わせ、測定データを表示部に表示させると共に測定データ記憶部に格納する。
(もっと読む)
物体アライメント測定方法及び装置
【課題】多数のアライメントヘッドのキャリブレーションを改良し、オーバレイ精度及び製品歩留まりを向上させる。
【解決手段】物体のアライメントを測定するための装置を備えるリソグラフィ装置であって、アライメント検出領域にてアライメントマークの位置を測定するためのアライメント検出器を各々が備える複数のアライメントセンサと、レベリングセンサ検出領域において物体の高さ及び/または傾斜を測定するためのレベリングセンサと、レベリングセンサとアライメントセンサとの間のフィードフォワード接続部と、を備えるリソグラフィ装置が提供される。
(もっと読む)
白色干渉法による管内面の形状測定装置及び方法
【課題】白色干渉法を用いた非接触測定器において、長さが1メートル以上あるくびれ形状を持つような細い管内の内面形状をミクロンオーダの高精度で計測できる測定方法及び装置を提供する。
【解決手段】白色光源3を参照光と測定光に分割して参照光を参照光路長スキャナ部7に送り測定光をセンサー部8に送る光カプラ4と、参照光路長スキャナ部から返った参照光とセンサー部から返った測定光の白色干渉を検出する光検出器5とからなり、測定対象の細管内に通した透明管内でセンサー部を移動させることで、透明管を透過する測定光により非接触で前記細管の内面形状を測定することを特徴とする白色干渉法による管内面の形状測定装置1の構成とした。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
鋼管の寸法測定装置
【課題】鋼管の横断面内の複数箇所における外径や肉厚を簡易にかつ十分な測定精度で自動測定を行う。
【解決手段】外径、肉厚測定用の第1の外側、内側レーザ距離計1,1Aを第1の直線13上に、位置合わせ用の第2の外側レーザ距離計2を第1の直線13と直交する第2の直線14上に、かつこれらを同心円上に、配置して、枠体3で支持し、枠体3を枠体回転手段、枠体移動手段、および、前後進手段で、全てのレーザ距離計の同心回転、第2の直線14の方向、および、同心円の直交方向の移動を可能とした。
(もっと読む)
処理システム
照明デバイスと、対象物を受容する対象物スライド面を有する対象物スライド部と、を備えるプレート形状の対象物の処理システムを改良するために、照明デバイス及び対象物スライド部は、対象物スライド部に対するプレート形状の対象物の位置が正確に決定されうるように互いに対して移動可能である。本発明によれば、少なくとも一つの縁部照射ユニットを備える縁部取得デバイスが形成されており、縁部照射ユニットは、対象物縁部領域の少なくとも一部において照射領域を備えており、該照射領域内において、各対象物縁部領域に配置される対象物縁部は、光を面状に放出する対象物スライド部の複数の側面によって照射される。対象物スライド部の反対に配置される対象物の側面において、対象物スライド面から或る距離において、少なくとも1つの縁部画像取得ユニットが形成されており、該縁部画像取得ユニットは、照射領域に配置される対象物縁部の縁部区域を、縁部画像として画像面に像形成する。各縁部画像は、少なくとも1つの縁部画像取得ユニットを使用することにより、対象物スライド部に対する位置的な正確さを伴って取得されうる。  (もっと読む)
(もっと読む)
基板保持装置、欠陥検査装置及び欠陥修正装置
【課題】第8世代や第10世代のガラス基板に対する欠陥検査や欠陥修正に対応できる基板保持装置を実現する。
【解決手段】本発明による基板保持装置は、固定端とテンション端との間に張架されると共に第1の方向に沿って延在する支持ワイヤ(7〜10)を含む複数のワイヤ支持機構(3〜6)と、ワイヤ支持機構の各支持ワイヤに対して第1の方向に沿って移動可能に連結されたステージ(30)と、ステージを第1の方向に案内するガイド手段(44)と、ステージを第1の方向に沿って移動させる駆動装置(51,53)とを具える。ワイヤ支持機構の各支持ワイヤは、同一の平面内において互いに平行に張架され、複数の支持ワイヤ上に基板が載置された際、当該ステージは、支持ワイヤ上に載置された基板の裏面と直接対向しながら第1の方向に移動する。ステージは、基板の裏面と直接対向しながら第1の方向に移動するので、支持ワイヤによる影響を受けることなく各種処理を行うことができる。
(もっと読む)
三次元形状計測装置
【課題】三次元形状計測装置のキャリブレーションを、カメラ解像度や移動分解能に依存せずに高精度に行う。
【解決手段】階段形状部に4つの段上平面を設け、各段上平面には、輝線LLに対して平行ではない輪郭を有し、その輪郭を境にして反射率の異なるパターンを形成したキャリブレーション用ブロック40と、キャリブレーション用ブロック40の底部からの高さ寸法とパターンの位置座標とのリファレンスデータを記憶した記憶部60と、キャリブレーション用ブロック40を載置する載置台30と、輝線LLを撮像する撮像部20と、載置台30を移動させる載置台駆動部90と、撮像された輝線LLから特徴点を検出する特徴点検出部70と、検出された特徴点の撮像画像における特徴点座標から幾何学的パターンの頂点座標を計算し、この頂点座標とリファレンスデータとに基づいて校正用データを生成する校正用データ生成部80とを備えた。
(もっと読む)
寸法測定装置
【課題】正確な測定を安定的に行うことができる寸法測定装置を提供する。
【解決手段】回転ステージ13の下部構成部材14の軸部22を固定部12の凹部23内に挿入し、軸部22を軸受け24を介して凹部23の内周面25に支持することによって、回転ステージ13を固定部12に回転自在に支持する。回転ステージ13の上部に直動ステージ71を設け、直動ステージ71を回転ステージ13の径方向73に延設する。直動ステージ71にカメラ81を支持し、回転ステージ13にセットされたワーク2の径方向73に延在する直線82上を移動できるように構成する。
(もっと読む)
道路レーンデータ生成装置、道路レーンデータ生成方法および道路レーンデータ生成プログラム
【課題】次世代の道路ネットワークデータを容易に生成できるようにする。
【解決手段】車線中心点群算出部110は、各車線の側線上に位置する複数点を示す車線側線点群データ181に基づいて、各車線の中心線上に位置する複数点を示す車線中心点群データ191を生成する。車線毎道路線形データ生成部120は、車線中心点群データ191に基づいて、各車線の線形を示す車線毎道路線形データ192を生成する。停止線/横断歩道ノードデータ生成部130は、車線中心点群データ191と各停止線および横断歩道上に位置する複数点を示す停止線/横断歩道点群データ182とに基づいて、停止線/横断歩道ノードデータ193を生成する。道路ネットワークデータベース生成部140は、車線毎道路線形データ192と停止線/横断歩道ノードデータ193とに基づいて、道路の線形および停止線/横断歩道を車線毎に示す道路ネットワークデータ194を生成する。
(もっと読む)
光波長フィルタリングを使用して表面を検査するシステムおよび方法
表面、たとえば鉄道線路軌道の昼間の検査のためのシステムおよび方法が開示されている。開示されるシステムはレーザ、カメラ、およびプロセッサを含む。レーザは表面に隣接して配置される。レーザは、表面の幅の1インチあたりの強度が少なくとも0.15ワットの合成強度で表面全体に光のビームを放出し、カメラは、表面上に放出される光のビームを有する表面の画像を取り込む。カメラは、日射内のディップ(dip)に対応する光の帯域だけを通過させる帯域フィルタを含む。レーザはディップでの日射より強い、放出される光ビームを提供するように選択される。プロセッサは、画像が表面の様々な測定できる様態を決定するために分析されることができるように、画像をフォーマットする。システムおよび方法は、表面のそれらの測定できる様態を決定するための1つまたは複数のアルゴリズムを含む。  (もっと読む)
(もっと読む)
剛体電車線測定装置
【課題】剛体電車線の幅方向の摩耗に関する情報を得ることが可能で、剛体電車線の状態を高精度で簡易に測定する剛体電車線測定装置を提供する。
【解決手段】本発明は、レール上を移動する保守用車に搭載されて剛体電車線10の測定を行う剛体電車線測定装置であって、ローラー支持部材131によって回動可能に支持されると共に、前記剛体電車線10に接触し前記保守用車の移動に伴い回転する摺接ローラー132と、前記摺接ローラー132の回転を検出するロータリーエンコーダー133と、前記剛体電車線10の幅方向にわたる形状を計測するラインレーザ型2次元形状計測センサ140と、前記ラインレーザ型2次元形状計測センサ140を移動可能に搭載するリニアレール141と、前記ローラー支持部材131と前記リニアレール141とが搭載される計測基台130と、前記摺接ローラー132を一定の荷重で前記剛体電車線10に接触させる定荷重バネ123と、を有することを特徴とする。
(もっと読む)
帯状部材の形状検出方法とその装置
【課題】ラインセンサーの台数を増やすことなく、帯状部材の形状を精度よく検出する方法とその装置を提供する。
【解決手段】所定の速度で回転する成型ドラム21に貼り付けられた帯状のタイヤ構成部材40の位置座標を二次元変位センサー11を用いて計測する際に、二次元変位センサー11のラインビームの延長方向を帯状のタイヤ構成部材40の長手方向とし、二次元変位センサー11で計測した異なる計測角度で撮影した、始端40aもしくは終端40bなどの同一箇所の変位量のデータを抽出するとともに、前記同一箇所の座標データを、前記同一箇所がラインビームの中心にくるように座標変換し、これら座標変換された複数の異なる計測角度で算出した同一箇所の座標データを合成することで、前記同一箇所の座標を特定するようにした。
(もっと読む)
形状測定装置
【課題】形状測定装置を高速で動作させる場合に、定盤の強度を確保しつつ、安全性を向上せる。
【解決手段】形状測定装置11のコラム23−1には、エアベアリング32が固定された支持部33が設けられており、エアベアリング32と、エアベアリング24とが対向するように配置されている。これにより、コラム23がより定盤21に押し付けられて、コラム23の転倒が防止される。また、コラム23が倒れたとしても、エアベアリング32がガイド29に引っ掛かり、コラム23が完全に転倒することはない。さらに、コラム23の移動方向に沿って設けられるガイド29が、定盤21に一体的に固定されているので、定盤21に溝を設けるなどの加工を施す必要がなく、定盤21の強度が確保される。本発明は、形状測定装置に適用することができる。
(もっと読む)
傾斜検出方法、および傾斜検出装置
【課題】簡単な構成で容易に撮像面の傾斜状態を検出可能な傾斜検出方法、および傾斜検出装置を提供する。
【解決手段】傾斜検出方法は、載置部に均等間隔でパターンを有するパターン画像を設けるパターン設置工程と、撮像部の焦点位置を順次変化させてパターン画像を撮像するパターン撮像工程と、撮像画像におけるパターン位置を検出してパターン領域を設定するパターン領域設定工程と、パターン領域における各画素の輝度値を検出し、検査方向に沿って画素間の輝度変化量を算出する輝度変化量算出工程と、各パターン領域における輝度変化量の積算値を算出する変化量積算工程と、この積算値が最大となる撮像画像に対応した焦点一致位置を検出する焦点一致検出工程と、焦点一致位置に基づいて、撮像部の入射光軸に対する載置部の傾斜状態を検出する傾斜検出工程と、を具備した。
(もっと読む)
3次元形状測定方法および装置
【課題】被検体の表面および裏面の各形状を、互いの相対的な位置関係を正確に把握しつつ高精度に測定する。
【解決手段】回転軸R2回りに回転せしめられる被検レンズ9に対し、顕微干渉計1の相対姿勢を変えながら行う形状測定を、被検レンズ9が裏面側から支持された状態で行う表面部の測定と、被検レンズ9が表面側から支持された状態で行う裏面部の測定とに分けて行う。表面部の測定により求められたコバ部側面97の第1の形状情報と、裏面部の測定により求められたコバ部側面97の第2の形状情報とを互いに照合することにより、被検体表面と被検体裏面との相対位置関係を求める。
(もっと読む)
エレベータ昇降路内の位置情報取得装置とそのガイド装置
【課題】エレベータ昇降路内にレーザ光を遮断する障害物が存在したとしても、正確な昇降路内の位置情報を取得することができるエレベータ昇降路内の位置情報取得装置と、この位置情報取得装置のガイド装置とを提供する。
【解決手段】エレベータの昇降路1内の被測定物の位置情報を取得する装置であって、昇降路1内の被測定物をレーザ光で走査して、走査されたレーザ光の被測定物からの反射光を受光して被測定物までの距離を計測し、計測された被測定物までの距離と被測定物へのレーザ光の照射角度とに基づいて被測定物の位置情報を測定するレーザスキャナ10と、レーザスキャナ10により測定された被測定物の位置情報を記憶する記憶部53と、を有してなり、レーザスキャナ10は、昇降路1内を昇降するかご30に設けられたガイド部材30a,41,42,43に移動可能に支持されている。
(もっと読む)
141 - 160 / 522
[ Back to top ]