
Fターム[2F065PP25]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | ロボット (378)
Fターム[2F065PP25]に分類される特許
361 - 378 / 378
移動ロボット、移動ロボット制御方法および移動ロボット制御プログラム

【課題】移動の目印として適切なランドマークを利用することにより、精度よくかつ効率的に自己位置を特定することのできる移動ロボットを提供する。
【解決手段】ランドマークに基づいて移動する移動ロボット1であって、移動した先のロボット位置において、ランドマーク候補を検出するランドマーク候補検出手段112と、ランドマーク候補に対する至ランドマーク距離を特定する至ランドマーク距離特定手段114と、至ランドマーク距離に基づいて、ランドマーク候補に対する適切性評価値を算出する適切性評価値算出手段114と、ランドマーク候補の適切性評価値と、ランドマーク格納手段103において登録ランドマーク対応付けて格納されている適切性評価値とに基づいてロボット位置を特定するロボット位置特定手段118とを備えた。
(もっと読む)
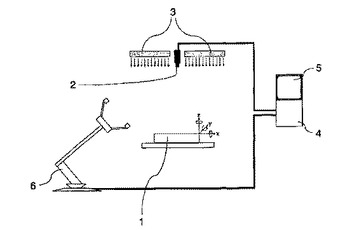
自律移動装置、並びに物体及び自己位置検出システム

【課題】自律移動装置において、自律移動装置が移動する環境に置かれた物体の位置や形状及び自律移動装置の自己位置の認識を精度が高く、簡単な構成で安価に実現すること。
【解決手段】自律移動装置1は、自律移動装置以外の物体が存在する環境の中で自律的に移動するように用いられ、物体及び自己位置検出システム6と移動手段4とを備える。物体及び自己位置検出システム6は、環境の中に設置した物体の表面形状や位置の情報を記録したデータベース21と、位置測定手段3で取得された物体の表面形状とデータベース21に記憶された物体の表面形状とを照合し、その照合が一致した場合にデータベース21に記憶された物体の情報を走行計画手段23へ送信すると共に、その照合が不一致の場合に位置測定手段3で取得された物体の情報を走行計画手段23へ送信する照合手段20と、照合手段20から送信された物体の情報に基づいて自律移動装置1の走行経路を計画する走行計画手段23とを備える。
(もっと読む)
ロボット
【課題】ロボットを移動体に追従走行させるために、ロボットが移動体を特定し、高速に移動体までの距離および方向を検知する。
【解決手段】オプティカルフローによる移動体を検出するための対応点位置を算出し配置して、移動体の画像を時系列に取得し、その複数画像間にて対応点の移動量を算出し、移動体の移動に合致する対応点を判断し、得られた対応点群より移動体領域を抽出し、移動体を追従対象として特定し、抽出した移動体領域から特定領域を抽出し、特定領域位置より移動体までの距離と方向を検出するロボットである。
(もっと読む)
被膜、表面、及び界面を検査するシステム及び方法
塗料被膜内の欠陥を検出するシステムは、表面及びその表面に塗布された被膜の温度を変更するよう構成された温度調節装置を含む。このシステムは、さらに、被膜内の異常を判断するよう、表面及び被膜の温度変化(時間の経過に伴う)を測定するための赤外線センサと、表面及び被膜の測定された温度変化と予想される温度変化(時間の経過に伴う)とを比較するためのプロセッサとを含むことがある。欠陥を判断する自己参照方法も開示されており、これによれば、周囲のピクセルが、それぞれのピクセルの温度変化を計算するための検出プロセスにおける基準として利用される。その上、接着界面を検査するための本発明による態様の適用形態も開示されている。 (もっと読む)
ロボットビジョンによる計測装置及びロボット制御装置
【課題】 視覚センサの撮像部を複数のロボットで付け替えて使用する場合の作業効率改善。
【解決手段】 可搬式操作部40から撮像指令をロボット制御装置11、ネットワーク回線30、トランシーバ6を介して無線で撮像部4に送り、計測対象物50を撮像する。画像データは無線でトランシーバ6に送られ、ネットワーク回線30を介してロボット制御装置11内の画像処理装置21で処理され、P1〜P3の3次元位置が計測され、ロボット1に対する計測対象物50の3次元相対位置姿勢が求められる。撮像部4をロボット2、3に着け替え、各対応する計測対象物について同様の計測を行なう。ネットワーク回線30と無線の利用でケーブル取り外し・接続作業が削減される。画像処理装置はロボット制御装置の外部に置き、ネットワークに組み込んでも良い。
(もっと読む)
ワーク面キズ検査装置
【課題】 ワークの被検査面のチェック・手直し作業において付く僅かな作業痕、特にアルミ板面のポリネット痕をキズと誤検出しないキズ検査装置を提供する。
【解決手段】 ワークの被検査面の画像を画像処理装置により処理して被検査面のキズの有無を検査する装置において、画像処理装置は、第1画像処理手段31により被検査面を撮像した画像40にフーリエ変換によるフィルタ処理を施し、ポリネット痕51をぼかしたフーリエ画像41を得る。次に、第2画像処理手段32によりフーリエ画像41にランクフィルタ処理を施し、キズ52がぼかされ、ポリネット痕51が一層ぼかされた画像42を作成する。次に、第3画像処理手段33によりフーリエ画像41から画像42を引き算し、キズ52を鮮明化した画像43を取得し、続いて第4画像処理手段34により、画像43に対して2値化処理を施し、被検査面上のキズ52のみを鮮明にした画像44を得、これに基づいてキズ52の有無を判定し、結果を出力する。
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 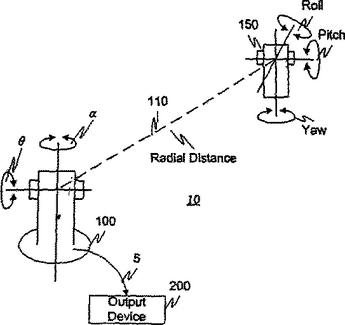 (もっと読む)
(もっと読む)
ロボットシステムにおける3次元視覚センサの再校正方法及び装置
【課題】 3次元視覚センサの再校正方法の簡素化。
【解決手段】 3次元視覚センサ102の正常時にロボットを用いて同センサ102と測定ターゲット103を1つ以上の相対的位置関係で配置し、測定ターゲット103を計測し、保持している校正パラメータを用いてドットパターン等の位置/姿勢情報を取得する。再校正には、各相対的位置関係を近似的に再現させ、測定ターゲットを再度計測し、特徴量情報やドットパターン等の画像面上の位置/姿勢を取得する。各特徴量データと位置情報に基づいて、3次元視覚センサの校正に関する複数のパラメータを更新する。相対位置関係の3次元視覚センサか測定ターゲットの少なくとも一方をロボットのアームに装着する。保持している校正パラメータを用いて、正常時と再校正時に得た各特徴量情報を用いて再校正時に位置情報を計算し、その結果に基づいて校正パラメータを更新することもできる。
(もっと読む)
製造された部品の取り付けおよび位置合わせを評価する方法
組立環境に関して組立部品の取り付けおよび位置合わせを評価する自動化方法を提供する。この方法は、前記組立部品に関する測定データを集める工程と、組立環境を示すモデルデータを定義する工程と、前記測定データを前記組立環境に関するモデルデータと比較することにより、その組立環境に関して前記組立部品を評価する工程と、を含む。前記組立環境は、組立配置において前記組立部品に隣り合う物体の表面により定義される。  (もっと読む)
(もっと読む)
推定装置および把持装置
【課題】 環境の条件に限定されず、対象物までの距離を推定する。
【解決手段】 ロボット10は、白色LED23と、カラーカメラ24と、右アーム26と、カラーカメラ24が撮像した複数の画像および白色LED23がワーク14に照射した光の光量を対応付けて記憶するメモリ104と、同一の位置でワーク14を複数回撮像するように制御し、光量が変化するように白色LED23を制御し、2種類以上の画像中にあるワーク14上の同じ位置を表わす画素を特定し、その画素の輝度差および光量差を算出し、白色LED23からワーク14までの距離の推定値を算出し、白色LED23およびカラーカメラ24がワーク14に近づくように、右アーム26を制御する制御用コンピュータと、右アーム26に白色LED23およびカラーカメラ24の移動に従属して移動するように取付けられ、かつワーク14を把持する第1指34〜第3指28とを含む。
(もっと読む)
適応三次元走査
本発明は適応三次元走査に関し、物理的なオブジェクトの三次元コンピュータモデルを生成する方法及びシステムを用いることにより、物理的なオブジェクトの完全な形状被覆率を得るための走査シーケンスが物理的なオブジェクトのために自動的に且つ具体的に生成される。その方法は、以下のステップを含む:走査システムを準備する。走査システムは、スキャナとスキャナに接続可能な及び/又はスキャナに組み込まれたコンピュータと、を有する。コンピュータはスキャナの仮想モデルを含む;物理的なオブジェクトの形状情報をコンピュータに入力し、コンピュータにより仮想モデルと形状情報に基づいて視感度関数を生成する。視感度関数は、少なくとも一つの所定の走査シーケンスにより、物理的なオブジェクトの関心のある領域の被覆率を評価することが可能である;視感度関数の評価に基づいて、少なくとも一つの走査シーケンスを確立し、少なくとも一つの走査シーケンスにより物理的なオブジェクトの走査を実行し、物理的なオブジェクトの三次元コンピュータモデルを得る。 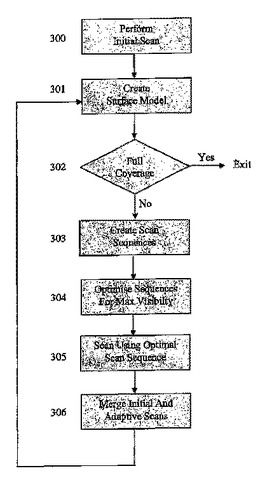 (もっと読む)
(もっと読む)
移動体検出方法及びシステム
【課題】 マーカーを配置する天井の形状によらずに位置検出が行え、かつ天井へのマーカーの設置コストが安価な移動体位置検出方法及びシステムを提供する。
【解決手段】 本発明の移動体位置検出方法は、移動体に搭載され、画像を撮影してデジタル画像データを出力する撮影手段と、この画像データを画像処理する画像処理手段と、移動体の上方に設置され、色及び形状で各々の座標位置を示し、設置位置の絶対座標を示すマーカで構成された移動体検出システムで移動体の位置を検出する方法であり、撮影部が1以上のマーカを1つの画像で撮影する撮影過程と、画像処理手段が、撮影されたマーカの色,形状を検出及び認識する画像処理で、マーカの絶対座標を検出する座標検出過程と、画像処理手段が、撮影された画像上の中心と、マーカとの相対座標を計算し、検出した絶対座標と相対座標との関係から撮影点の位置を検出する撮影点検出過程とを有する。
(もっと読む)
移動作業機の位置検出装置
【課題】 多種の作業に対応できる移動作業機の位置検出装置を提供する。
【解決手段】 移動作業機1の作業領域A0の全域を外部から撮影する撮影手段64と、この撮影手段64からの画像に画像処理を施す画像処理手段66とを備えて、作業領域A0における移動作業機1の絶対位置を計測するように構成した。
(もっと読む)
欠陥位置特定方法及びマーキングシステム
【課題】三次元対象物で検知される欠陥を高い精度で位置特定し、場合によっては、マーキングするための方法を提供すること
【解決手段】本発明は、三次元対象物(2)、特に塗装された車体上の欠陥の位置を特定する方法及びマーキングシステムに関し、撮像装置(3、4)によって、欠陥が検知され、その位置が特定される。本発明によれば、対象物(2)の設計データ(CADデータ)と撮像装置(3、4)の光学撮像特性と対象物(2)が、撮像時に既知であり、これらによって、欠陥の位置が決定され、場合によっては、スプレーヘッドによってマーキングされる。
(もっと読む)
検査路設定及び検査領域決定方法
【課題】取り扱いが容易であり、全ての検査領域を確実にカバーできる検査路設定方法、及び検査領域決定方法を提供すること。
【解決手段】本発明は、三次元対象物(3)を検査するために、少なくとも1つの光学撮像装置(4)、特にカメラの検査路(2)を設定する方法に関する。撮像装置(4)と対象物(3)は、変位装置(5、6)によって、互いに相対運動が可能である。本発明に係る方法によれば、算術演算ユニット(10)によって、対象物(3)及び/又は対象物上の検査される領域(12)の設計データ(8)、特にCADデータ及び/又はセンサによって決定されたデータ、及び撮像装置(4)の光学撮像特性に基づいて、光学撮像装置(4)の検査路(2)が自動的に決定される。この場合、ある規定の幾何学的関係が、撮像装置(4)と検査される表面との間に設定される。
(もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
物体の3D位置の非接触式光学的測定方法及び測定装置
この発明は物体の3D位置、すなわち、ある幾何学的特性が公知の物体の3D位置及び3D配向の非接触式光学的決定のための方法及び装置に関する。前記発明の目的は単純な手段で、高測定速度、精度で、調査物体に関する完全な3D情報を調査することである。この目的のため、物体画像がカメラによって生成され、その生成画像に基づく物体の3D位置が、検出幾何学的特性に関する画像情報によって計算される。
 (もっと読む)
(もっと読む)
非平面的試料を調査するための方法及び装置
試料特に(製薬)錠剤を調査するための方法及び装置である。放射体及び/又は試料は、最初は、放射体が所定の距離にあり、試料表面の最初に照射した点の法線方向に位置する。放射体は25GHz〜100THzの範囲で複数の周波数を持つ光を試料の複数の点に照射する。放射体と試料とは相対的に位置を変えることが可能である。ただし、その位置の変更は、放射体と試料との間では所定の距離(試料表面と放射体との)を保存し、放射体は各照射点の法線と一致させ、透過又は反射した光を各点で検出することが可能になるようにする。この特徴的な応用として(製薬)錠剤のコーティングの形状及び組成を画像化するというのがある。 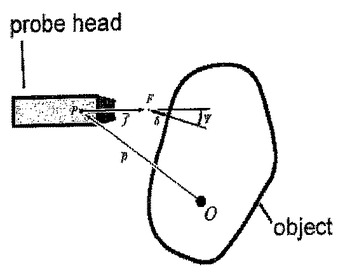 (もっと読む)
(もっと読む)
361 - 378 / 378
[ Back to top ]