
Fターム[2F065QQ32]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | 信号補正;輪郭強調 (1,212)
Fターム[2F065QQ32]の下位に属するFターム
Fターム[2F065QQ32]に分類される特許
161 - 180 / 322
法線情報生成装置および法線情報生成方法

【課題】陰影領域について高精度に法線情報を生成することができる法線情報生成装置等を提供する。
【解決方法】被写体の表面における法線情報を生成する法線情報生成装置100であって、被写体からの光の輝度に関する情報である輝度情報及び被写体からの光の偏光に関する情報である偏光情報を含む被写体画像に関する情報を取得する画像情報取得部110と、画像情報取得部110で取得された輝度情報及び偏光情報に基づいて、光の当たり方によって被写体の表面に生じる陰領域、及び、被写体によって光が遮断されたことによって他の物体上に生じる影領域を、被写体画像から抽出する陰影領域抽出部120と、陰影領域抽出部120で抽出された陰領域について、画像情報取得部110で取得された偏光情報を用いて、対応する被写体の表面での法線を特定する法線情報を生成する法線情報生成部104とを備える。
(もっと読む)
3次元計測方法および3次元計測装置

【課題】計測対象部位が限定される場合でも、計測結果を計測対象物の全体像に対応づけてわかりやすく示した画像を表示する。
【解決手段】特定の点や領域に計測対象が限定されたワークを対象に、このワークを正面視する方向から撮像するカメラと、斜め上方から撮像するカメラとにより撮像し、各計測対象部位の高さを計測する。そして、計測処理に使用した正面視画像の各画素を、当該画像の座標系を構成するx,y軸と高さを表すz軸とによる3次元座標系に仮想配置して、透視変換を行うことにより、計測結果を表す処理結果画像を生成する。各画素のうち、高さ計測の対象とされた画素には、z座標として計測値が設定され、その他の画素のz座標はゼロ値に設定される。また、画像中の計測対象点P1´〜P4´や計測対象領域R´には、位置の識別のための+マークや高さを表す補助線が設定される。
(もっと読む)
回路パターン検査装置および検査方法
【課題】回路パターンの欠陥検査方法では、検査精度を高めるためには、画像の分解能をあげなければならない。また、回路基板の集積密度も向上しており、画像の分解能は高くする必要性もでる。しかし、画像の分解能を上げると、画像データ量が増える。するとCCDなどの画像変換素子のデータ転送速度がコンピュータの処理速度より低いため、検査時間が増大するという課題があった。
【解決手段】比較的低い分解能で回路パターンの映像を撮り、画像補間によって情報量を増やす。その上で2値化した画像データを用いて欠陥検査を行う。このようにすることで、CCDなどの画像変換素子からのデータ転送時間を短くすることができ、またデータ補間と2値化によって、誤検出や過検出といったことのない精度よい欠陥検出をすることができる。
(もっと読む)
分包シート検査システム及び検査方法
【課題】内容物の位置ズレを高精度に検出できる分包シート検査システム及び検査方法を提供する。
【解決手段】分包シートの外面に照射光を照射可能な光源と、前記光源から照射された照射光が分包シートの外面で反射された反射光を受けて映像信号を発生させる撮像手段4と、撮像手段4から出力される前記映像信号にエッジ強調処理を行なうことでシール部を強調するとともに、強調されたシール部において、分包シートの外端からポケット部とシール部との境界までの距離をシール長を計測するシール長計測装置6と、分包シートに照射するX線を照射可能なX線源7と、このX線照射に伴うX線透過量を検出するX線検出器8と、シール長の情報を入力してポケット部の位置と適合する検査領域を設定し、X線検出器8で検出されたX線透過量に基づいて、検査領域における内容物を検査する判定手段9とを備えたことを特徴とする。
(もっと読む)
障害物検出装置、障害物検出システム及び障害物検出方法
【課題】低コントラストの障害物を検出でき、且つノイズとなる不要なエッジ点の検出を防止することができる障害物検出装置を提供する。
【解決手段】遠赤外線撮像装置1R,1Lが撮像して得た画像に基づいて障害物を検出する障害物検出装置3に、撮像して得た画像を構成する各画素の画素値に基づいて各画素のエッジ強度を算出する手段と、複数の所定画像部分毎にエッジ強度の度数分布を算出する手段と、障害物の輪郭に相当する所定数のエッジ点を検出するための閾値を、前記度数分布に基づいて前記所定画像部分毎に選択する閾値選択手段と、前記所定画像部分を構成する画素の画素値及び該所定画像部分で選択された閾値を比較することにより、該閾値以上の画素値を有するエッジ点を検出するエッジ点検出手段とを備え、前記エッジ点検出手段が検出したエッジ点に基づいて障害物を検出する処理を実行する制御部を備える。
(もっと読む)
ドット計測方法及び装置、プログラム、並びに画像形成装置
【課題】ドット着弾位置及びドット径(液滴体積)を同時に高精度で測定可能とするドット計測技術を提供する。
【解決手段】各ノズルに対応したドット列によるラインパターンが形成された媒体を第1の方向に搬送しつつ、ラインパターンに対して所定の角度で交差する受光素子列を有する撮像装置を第1の方向と異なる第2の方向に移動させながらラインパターンを撮像し、当該撮像画像から各ラインパターンを横切る1次元画素列の画像信号値の変動を表すプロファイルブラフを複数取得する。各プロファイルグラフから各ラインパターンの濃度中心に対応する極値位置と、当該ラインパターンの左右両エッジに対応する第1エッジ位置及び第2エッジ位置を算出し、最小二乗法により、ライン中心近似直線、第1エッジ近似直線、第2エッジ近似直線を得る。予め知見しておいたライン幅とドット径の相関からドット径を求める。
(もっと読む)
斜めのビュー角度をもつ検査システム
【課題】表面を斜めの検査角度において高い解像度で検査できるようにする方法及び装置を提供する。
【解決手段】表面に対して斜めのビュー角度に沿って表面のエリアを像形成するための装置は、ビュー角度に向けられた光学軸に沿ってエリアから光学放射を収集することによりエリアの初期傾斜像を形成するように適応された無限焦点光学リレー(192)を備えている。傾斜補正ユニット(194)が、初期像の傾斜を補正するように結合されて、実質的に無歪の中間像を形成する。中間像を像検出器に収束するために拡大モジュール(198)が結合される。
(もっと読む)
外観検査方法及びその装置および画像処理評価システム
【課題】外観検査において感度を高く設定すると虚報も多く検出してしまうため、高感度で検査することができないという問題があった。そのため、全体の欠陥捕捉率を高く維持しながら虚報を抑制することにより実質感度を向上する技術が必要であった。
【解決手段】
検出欠陥の画像をもとに画像特徴量を算出し、検出欠陥の位置座標をもとに座標特徴量を算出し、画像特徴量と座標特徴量のいずれかに対するしきい値処理からなる決定木に従って虚報判定を行う構成とする
【効果】上記画像特徴量と座標特徴量を利用し、決定木に従って虚報判定を行うことにより、実欠陥と虚報の識別を精度よく行うことができるため、虚報を抑制しつつ高感度に検査することができる。
(もっと読む)
測距装置およびその測距方法
【課題】被測定物までの距離を高精度に測距できる測距装置およびその測距方法を提供することを目的とする。
【解決手段】本発明に係る測距装置は、撮像レンズを介して被測定物を撮像する少なくとも3つのカメラと、少なくとも3つのカメラから2つのカメラを選択する出力選択部30と、2つのカメラにより被測定物を撮像させ、撮像された2つの画像における被測定物の所定領域を示す2つの所定領域画像と2つの撮像レンズとの位置関係から、被測定物の所定領域までの距離を測定する演算部40とを備えて構成されている。そして、出力選択部により選択された2つのカメラは、その光軸が互いに平行でかつ同一方向に向いており、また、少なくとも3つのカメラにおいて、そのうちの3つのカメラが同一直線上に並ぶことなく同一面上に配置されている。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 撮像装置により撮影された画像情報に基づいて行う撮像装置又は物体の位置及び姿勢の計測を安定化させること。
【解決手段】 撮像装置100で撮影した画像を画像取得部110で取得し、そのときの姿勢をセンサ計測値取得部120で取得し、直線検出130が撮影画像から直線を検出する。センサ計測値、検出した直線の3次元空間における方程式に基づき、位置姿勢計測部150が、撮像装置100の位置姿勢、又は、観察対象物体10の位置姿勢を算出する。
(もっと読む)
画像のステレオ・マッチングのためのシステム及び方法
前処理ステップとして動的プログラミングを用いる大域的最適化関数(例えば、確率伝播関数)を用いる少なくとも2つの画像(例えば、立体画像対)のステレオ・マッチングのためのシステム及び方法が提供される。本開示のシステム及び方法は、シーンから第1及び第2の画像を取得し(402)、第1画像内の少なくとも1つの点と第2画像内の少なくとも1つの対応する点との視差を推定し(404,406)、この推定した視差を確率伝播関数(例えば、大域的最適化関数)により最小化する(410)ことを提供する。確率伝播関数は、その確率伝播関数を高速化するよう、第1及び第2の画像に適用される決定論的マッチング関数(例えば、動的プログラミング)の結果により初期化される。システム及び方法は、更に、推定した視差から視差マップを生成し、それを奥行きマップに変換する。 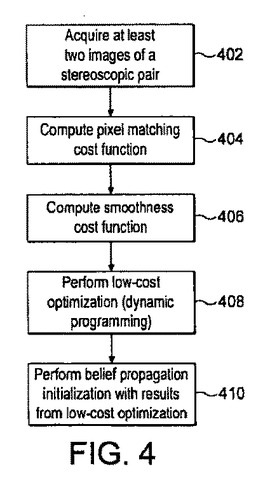 (もっと読む)
(もっと読む)
三次元測定装置及び携帯型計測器
【課題】反射コート材を塗布せずとも、半透明部分を含む被測定物の三次元形状を正確に計測することができるようにする。
【解決手段】非偏光の入射光が一定の入射角をもって試料面に入射したとき、その表面反射光はS偏光となり、内部散乱光は非偏光となる。そこで、表面反射光及び内部散乱光が受光部で受光される光路上に、P偏光成分を吸収することが可能な直線偏光板を配置する。これにより、表面反射光と内部散乱光のS偏光成分とが受光される状態を形成することができる。つまり、内部散乱光だけを減衰させた状態で、表面反射光に由来するS偏光を受光部で受光させることができる。
(もっと読む)
表面欠陥検査システム、方法及びプログラム
【課題】測定対象物の表面が平坦面でない場合にも表面欠陥の検出精度を高める。
【解決手段】周期的に変調された線状レーザ光の測定対象物2に対する照射位置を連続的にずらしながら、遅延積分型カメラ30により測定対象物2からの反射光を撮像して光切断画像を出力し、測定対象物2の表面欠陥を検出する表面欠陥検査システムであって、カメラ30で得られた光切断画像を順に配列することにより得られる縞画像の各位置における位相のずれを算出する位相算出部505と、位相算出部505で得られた位相のずれに基づいて位相のずれが不連続になっている位置を検出し、その検出した位置における位相のずれを繋ぐことにより位相のずれを連続化する位相連続化処理部506とを備え、位相連続化処理部506は、位相のずれを連続化する処理の後に、該連続化させた位相特性上における段差を検出して、その段差をなくす段差補正処理を更に施す。
(もっと読む)
表面欠陥検査システム、方法及びプログラム
【課題】測定対象物が横断面形状において両端部が低くなる或いは高くなる曲線を有する長丈材である場合にも、表面欠陥の検出精度を高める。
【解決手段】周期的に変調された線状レーザ光を測定対象物2の表面に照射するレーザ装置10と、測定対象物2からの反射光を撮像する遅延積分型カメラ30とを用いて、測定対象物2に対する線状レーザ光の照射位置を連続的にずらしながら、遅延積分型カメラ30により測定対象物2からの反射光を撮像して光切断画像を出力し、測定対象物2の表面欠陥を検出する表面欠陥検査システムであって、測定対象物2を含んで撮像された輝度画像に基づいて、測定対象物2のエッジ位置を検出するエッジ位置検出511と、エッジ位置検出部511で検出されたエッジ位置に基づいて、遅延積分型カメラ30で得られた画像にセンタリング処理を行うセンタリング処理部507とを備える。
(もっと読む)
欠陥検出方法および装置
【課題】被検体画像データに重畳されたノイズを欠陥として誤検出することなく、被検体に存在する本来の欠陥のみを、高精度に検出する。
【解決手段】被検体ステージ101と、被検体ステージ101上の被検体に光を照射する照明光学部102と、被検体からの反射光を撮像する撮像カメラ103と、撮像された画像データを格納するフレームメモリ110と、画像データに画像処理を施すコンピュータ111を備えている。コンピュータ111は、被検体画像データに対し、輪郭強調処理を施して第1画像処理データを得るとともにローパスフィルタ処理を施して第2画像処理データを得る画像処理データ取得部と、第1画像処理データと第2画像処理データの差分画像データを得る差分画像データ算出部と、差分画像データにハイパスフィルタ処理を施すハイパスフィルタ処理部と、動的しきい値比較部と、欠陥有無判定部とを備えている。
(もっと読む)
丸線材の真円度を測定する方法
本発明はローラ列中を長手方向に動く丸線材の真円度測定または形状誤差の測定のための方法に関する。本方法は、それ自体は公知のように、それぞれ感光センサとレーザとを有する少なくとも2つのレーザスキャナを備えた測定装置を用いて、測定される丸線材に接し、かつ該丸線材を囲む多角形を成す少なくとも3つのシャドウエッジを形成および測定し、そこから相応する接線を計算するものであり、a)前記測定の前に、前記測定装置の測定野内の中心(Z0)がまだ定められていなければ、当該中心(Z0)を校正し定め、b)前記中心(Z0)から前記接線(T1,T2,T3,T4,T5,T6,T1’,T2’,T3’,T4’,T5’,T6’)までの垂線(r1,r2,r3,r4,r5,r6,r1’,r2’,r3’,r4’,r5’,r6’)を求め、前記中心(Z0)から前記接線(T1−T6’)までの距離を計算し、c)前記丸線材を囲む多角形の頂点(A−K)を計算し、輪郭を求め、d)前記輪郭に対して基準円を次のように、すなわち、i)前記基準円に対する前記輪郭の平方形状誤差が最小値に達する、ii)前記基準円が前記輪郭を囲むできるだけ小さな円を描く、iii)前記基準円が前記輪郭の中に嵌るできるだけ大きな円を描く、またはiv)前記基準円と前記基準円と同心の別の円がともに、半径の差が最小のときに、前記輪郭を包囲するように配置し、e)前記基準円の直径(Dref)を計算し、空間内での位置から前記基準円の中心点を表す前記基準中心(Zp)を求め、f)前記基準中心(Zp)から前記輪郭までの少なくとも2つのベクトルを計算し、当該データから非円度を求めることを特徴とする。  (もっと読む)
(もっと読む)
画像処理装置及びこれを用いた画像処理方法
【課題】撮像画像を処理する画像処理装置において、画像検査に不慣れなユーザでも容易に迅速に検査設定できるようにする。
【解決手段】画像処理装置は、複数の検査プログラムが格納された記憶部と、ユーザ操作で所望の検査設定を行う検査設定部と、装置全体を制御する制御部とを備え、検査設定部は予め複数の設定項目を含むデータテーブルが設けられている。検査設定において、ユーザは検査目的の項目を選択する第1の決定ステップ(S211)と、対象物の画像の特徴を選択する第2の決定ステップ(S212)と、検査基準の項目を選択する第3の決定ステップ(S213、S215)とにより、各設定項目を決定すると、制御部はユーザの最終設定項目の検査基準に適合する検査プログラムを自動的に設定する(S214、S216)。これにより、検査プログラムの選定を直接行わなくてよいので、不慣れなユーザでも容易に迅速に検査設定することができる。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】幾何学的な変換処理を行うことなく、画像に表れる2次元方向のワークの傾きの補正を自動的に行うことができるようにする。
【解決手段】傾き画像生成部101は、縦方向または横方向の傾きを示す傾き画像192を生成し、差分画像生成部102は、観測高さ画像191と傾き画像192との輝度の差分を画素ごとに計算することにより、観測高さ画像191と傾き画像192との差分画像を生成し、分散値計算部103は、差分画像の輝度ヒストグラムの分散値を計算し、傾き補正部104は、差分画像の輝度ヒストグラムの分散値が所定値以下になるように傾き画像192の傾きを補正する。
(もっと読む)
毛髪繊維形状解析システム及び解析方法
【課題】うねり形状、うねりの周期、太さ、太さ分布等の毛髪繊維形状に関する情報を、簡便な操作で短時間に測定できるようにする。
【解決手段】 毛髪繊維形状解析システムが、平面に載置した毛髪繊維の二次元画像を取得する画像取得手段、毛髪繊維画像上の所定間隔にある複数の位置で、毛髪繊維のうねり指標又は太さを演算し、集計する機能を備えた演算手段、及び表示手段を備える。
(もっと読む)
濃淡画像の輪郭補正処理方法及びその装置
【課題】濃淡画像と距離画像を利用して物体認識用途に好適な輪郭補正処理後の濃淡画像を得る。
【解決手段】濃淡画像100から抽出した濃淡輪郭画像104と距離画像102から抽出した距離輪郭画像106の双方の輪郭が一致した濃淡画像100の輪郭に対して輪郭補正処理を行い輪郭補正処理後の濃淡画像を生成するようにしているので、被写体の境界を際だたせる(強調する)ことが可能であり、被写体の境界に通常の輪郭補正処理とは異なる輪郭補正処理を行うことができる。
(もっと読む)
161 - 180 / 322
[ Back to top ]