
Fターム[2F065QQ32]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | 信号補正;輪郭強調 (1,212)
Fターム[2F065QQ32]の下位に属するFターム
Fターム[2F065QQ32]に分類される特許
81 - 100 / 322
検査装置、検査方法および検査プログラム
【課題】複数の突起部を有する検査対象物を迅速に検査する。
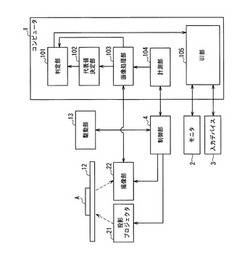
【解決手段】検査装置は、検査対象物A載せる透明なテーブル12と、テーブル12の下面から光の強度が周期的に変化する光パターンを照射する光照射部と、光パターンが照射された検査対象物Aを、テーブル12の下面から撮影する撮像部22と、検査対象物Aの画像を処理して、検査対象物Aの表面の3次元形状を表す表面形状データを生成する画像処理部103と、表面形状データにより表される検査対象物Aにおける複数の突起部それぞれにおいて、テーブル12の上面に対する位置を示す値の代表値を決定する代表値決定部102と、複数の突起部それぞれにおける代表値の分布が予め設定された基準を満たしているかを判定する判定部101と備える。
(もっと読む)
部品の実装装置および部品の実装方法

【課題】実装対象の部品を接合用材料を間にして所定の実装領域に搭載した際に、接合用材料の所定状態を安定的に得るための部品の実装手法を提供する。
【解決手段】部品の実装工程では、接合用材料形成工程S1と、部品搭載工程S2と、はみ出し状態検出工程S3と、形状パターン更新工程S4とを含む。接合用材料形成工程S1では、部品の実装領域に、接合用材料を、所定の形状パターンでもって形成する。部品搭載工程S2では、実装領域に接合用材料を間にして部品を搭載する。はみ出し状態検出工程S3では、部品搭載後に、実装領域から実装領域の外側にはみ出している接合用材料のはみ出し状態を検出する。形状パターン更新工程S4では、実装領域に形成する接合用材料の形状パターンの設定を、検出された接合用材料のはみ出し状態に応じた形状パターンに更新する。
(もっと読む)
極紫外線マスクブランクの欠陥検出のための検査システム及び方法
極度に小さい欠陥を含む、表面欠陥のための、極紫外線(EUV)マスクブランクのような、無地の物体を検査するための新奇の検査方法及びシステムが提供される。欠陥は高さ約1ナノメートルに過ぎない凸凹のような、様々な位相物体、及び小粒子を含んで良い。検査は再構成された深UV検査システムのような、約250ナノメートル未満の波長で行われる。部分干渉シグマは約0.15から0.5の間に設定される。位相欠陥は、例えば1つの正の焦点深度(DOF)及び1つの負のDOFにおいて、1つ以上の脱焦点化された検査パスを用いて発見可能である。特定の実施形態において、DOFは約−1から−3及び/又は+1から+3の間である。複数の検査パスの結果は欠陥種類を区別するために結合されて良い。信号対雑音比を改善するために検査方法が整合フィルター、閾値、及び/又は補正係数の適用を伴って良い。 (もっと読む)
アライメント装置、この装置を備えた実装装置およびアライメント方法
【課題】ヘッドの回転に影響されることなく実装対象物および被実装対象物にそれぞれ設けられたアライメントマークを上方から認識手段により読取りつつ、ヘッドを回転することにより実装対象物および被実装対象物の回転方向における相対的な位置調整を行うことができる技術を提供する。
【解決手段】空間OSにヘッド2と非接触状態で2視野光学系レンズ14aが挿入されてアライメントマーク20a,22aが上方から光学的に読取られるため、ヘッド2が回転しても、2視野光学系レンズ14aによる光路の変換方向がCCDカメラ14bに向かう方向からずれないため、ヘッド2の回転の影響を受けることなくアライメントマーク20a,22aを上方から上下マーク認識手段14により読取りつつ、部品20および基板22の回転方向における相対的な位置調整を行うことができる。
(もっと読む)
信号波形補正方法、露光装置、及び、デバイス製造方法
【課題】高精度のアライメント処理を可能とするための信号波形補正方法を提供する。
【解決手段】本発明の信号波形補正方法は、被観察面を観察して得られる信号波形を補正する信号波形補正方法であって、照明強度を変えながら複数の参照信号を作成する参照信号作成工程と、前記複数の参照信号を用いて前記信号波形の補正式を作成する補正式作成工程と、前記補正式を用いて前記信号波形を補正する信号補正工程とを有し、前記補正式は、前記被観察面を照射する光の照射時間に応じて異なる。
(もっと読む)
道路形状認識装置
【課題】実際の道路形状を的確に検出することが可能な道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、自車両が走行する道路面について実空間上の距離Zと高さYの情報を有する距離データDを互いに異なる複数の地点で検出する距離高さ検出手段6と、複数の距離データDを自車両に近い側の群G1と遠い側の群G2とに分割し、群G1、G2の境界DL部分の距離データDを一方の群から他方の群に移し替えるごとに距離データDの近似直線L1、L2を算出する近似直線算出手段10と、距離データDを移し替えた群G1、G2ごとにそれぞれの近似直線L1、L2に基づく統計値をそれぞれ算出する統計値算出手段11と、統計値に基づいて近似直線L1、L2の組み合わせの中から1つを選択し、選択した近似直線L1、L2の組み合わせを用いて道路形状モデルを生成する道路形状モデル生成手段12とを備える。
(もっと読む)
車両下部測定装置、プログラムおよび方法
【課題】車両下部を構成する部品群の相対的な位置および角度を精度良く測定することが可能な装置、プログラムおよび方法を提供する。
【解決手段】車両下部測定装置100に、自動車1が載置される定盤110と、自動車1の車両下部形状データを生成する三次元形状測定装置120と、定盤110に対する自動車1の各車輪のホイールの位置および角度を算出し、自動車1の補完車両下部形状データを生成し、定盤110に対する自動車1の本体の傾斜角度を算出し、自動車1の補完車両下部形状データの座標変換を行い、第一リンクポイント位置を算出し、各車輪のバウンド/リバウンド量を算出し、第二リンクポイント位置を算出し、第一リンクポイント位置および第二リンクポイント位置に基づいて自動車1の下部の各リンクポイントのズレを算出する演算装置131と、を具備した。
(もっと読む)
全方位3次元空間認識入力装置
【課題】ステレオ画像及び距離・形状など3次元情報を取得する3次元空間認識入力装置において、常時、全方位で高解像度且つ死角の無い入力を取得可能な3次元空間認識入力装置を提供する。
【解決手段】ミラー部3,4とカメラ部3c,4cで構成する光学系により全方位画像を撮像する2つ以上の撮像手段を用いて、撮影空間に於けるステレオ画像及び被写体の形状及び構造を表わす3次元座標値を抽出する3次元空間認識入力装置であって、2つ以上の全方位撮像手段に於いて高解像度領域で視野が光学的に重なり、且つ相互の写り込みによる死角を解消するように配置する事により、常時高画質なステレオ視及び高精度3次元位置座標を計測する手段を備える。
(もっと読む)
形状欠損検査装置、形状モデリング装置および形状欠損検査プログラム
【課題】検査対象物体の形状を観察し、個体差を考慮しつつ欠損を検出する。
【解決手段】検査撮像部154は、ワークとなるセルを撮像して検査画像を取得する。抽出部160は、検査画像を参照し、ワークの輪郭部分に位置する点である検査エッジ点のを特定する。検査エッジ誤差算出部168は、マスタとなるセルの輪郭線を定義する基本関数と検査エッジ点の距離を算出し、欠損点特定部174は乖離が大きい検査エッジ点を欠損点として除外する。検査関数特定部172は、欠損点以外の検査エッジ点の座標に基づいて、ワークの輪郭線を定義するための検査関数を算出する。検査エッジ誤差算出部168は、検査関数と検査エッジ点の距離を算出する。検査関数から乖離する検査エッジ点は欠損候補点として特定される。欠損判定部176は、欠損候補点に基づいて、ワークの欠損を判定する。
(もっと読む)
光学センサおよびそれを備えた機器
【課題】機器の周辺でこの機器を使用し又は使おうとしている人の有無を、小型かつ簡単な構成で検知でき、機器の省エネを図ることができる光学センサを提供すること。
【解決手段】1つのパッケージに、パッケージの外部の被写体を撮像して画像信号を出力するイメージセンサ部12と、イメージセンサ部12が出力する画像信号を処理する信号処理回路部13とが収容されている。信号処理回路部13は、画像信号が表す画像内に人の顔が存在するか否かを判定して、画像内に人の顔が存在すると判定したとき、実空間でのイメージセンサ部と顔との間の距離及びイメージセンサ部に対する顔の向きを検知する。
(もっと読む)
欠陥検出方法および欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法および欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいてエッジを検出し、追跡方向設定工程により、検出されたエッジに対して、始点および終点を設定し、エッジに沿って始点から終点に向かうエッジ追跡方向を設定する。この後、角度変化算出工程により、エッジ上の各画素位置における角度変化量を算出し、総和算出工程により、始点から所定画素位置までの角度変化量の総和を、各画素位置に対して算出する。そして、欠陥検出工程により、被検査物に対して算出される前記角度変化量の総和と、所定の基準パターンに対して算出される角度変化量の総和とを比較して、欠陥を検出する。
(もっと読む)
組み付け精度測定方法および測定装置
【課題】車体の隣接する部品間の隙間および段差を高い精度で測定することが可能な組み付け精度測定方法および測定装置を提供する。
【解決手段】照射ヘッドとCCDカメラとを含む非接触式の測定ユニットにより被測定部の隙間および段差を測定して、その測定結果に基づいてCAD上に作成された当該被測定部の測定画像と対応するマスタ画像とをベストフィット処理することにより測定画像を補完して出力画像を作成して、該出力画像に基づいて被測定部の隙間および段差を算出するので、被測定部の隙間および段差を極めて高い精度で測定することが可能になる。
(もっと読む)
体型判定方法及び体型判定システム並びにそれを用いた監視システム
【課題】本発明は、人物の体型を判別するための体型判定方法及び体型判定システム並びにそれを用いた監視システムに関し、人物の画像から体型の特徴量を算出して、体型を判別する体型判定方法及び体型判定システム並びにそれを用いた監視システムを適用することを目的とする。
【解決手段】本発明は、人物の体型を判別する体型判定方法であって、人物の全体画像を取得する画像取得手順と、人物の全体画像に基づいて体型の特徴量を算出する体型特徴量算出手順とを含み、体型特徴量算出手順で算出された体型の特徴量に基づいて人物の体型を判別する。
(もっと読む)
テンプレートマッチングシステムおよびテンプレートマッチング方法
【課題】テンプレートマッチングにより取得したテンプレートに基づいて、部品が載置されている姿勢が安定的か、否かを判定し、不安定な場合は警告を生成する。
【解決手段】テンプレートマッチング部100は、取得したワーク130の設計データに基づいて形状を抽出し、複数の姿勢で平面に射影した複数の射影像を生成し、それぞれの姿勢に応じて形状の姿勢を仮想的に変化させ、形状の姿勢が復元する結果に基づいて、姿勢毎に載置された場合の安定度を算出し、射影像のそれぞれに応じて生成したテンプレートと安定度と対応付けて記憶し、撮影したワーク130の撮影画像に対応するテンプレートをマッチングにより選択し、選択したテンプレートに対応した安定度に基づいて、ワーク130が載置された姿勢について警告するか、否かを判定し、警告すると判定した場合、警告を示す警告信号を生成する。
(もっと読む)
3次元計測処理のパラメータの導出方法および3次元視覚センサ
【課題】3次元計測の計測条件を表すパラメータを適切な適切な認識結果を出力するのに必要な値に設定する処理を、容易に行えるようにする。
【解決手段】ワークの実物モデルWM1,WM2のステレオ画像を対象に、ユーザが設定した計測パラメータによる3次元計測を実行し、計測結果に基づきワークモデルWM1,WM2の位置および姿勢を認識する。また認識結果を表す画像を表示し、ユーザの認識結果を選択する操作に応じて、選択された認識結果を示す数値データをサンプルデータに設定する。そして、計測パラメータの設定値を所定の数値範囲内で毎回変更して、設定された計測パラメータによる3次元計測および認識処理を実行し、サンプルデータとの相違量が所定値以内になる認識結果が得られたときに設定されたパラメータの数値範囲を合格範囲に設定する。そして合格範囲の中間値をパラメータの最適値として確定し、登録する。
(もっと読む)
ロールカリバー位置検出装置およびロールカリバー位置検出方法
【課題】ロールカリバー形状調整のための各カリバーロールのカリバー部分の相対位置関係を高精度に検出することができること。
【解決手段】複数のロール2a〜2dを組み合わせて形成される圧延空間であるロールカリバーの全カリバーを含む圧延方向断面形状を取得する画像処理部13と、取得された圧延方向断面形状をもとに各カリバーロールを識別するロール識別部14と、識別された各カリバーロールのカリバー部分の形状プロフィールを求め、各カリバーロール毎に予め設定される有効カリバー角の範囲内における各形状プロフィールと予め設定される圧延方向断面形状に基づく目標プロフィールとの間の残差を算出する演算部15と、算出された残差および前記目標プロフィールに対する各カリバーロールの形状プロフィールの相対位置を出力する表示部16と、を備える。
(もっと読む)
測定方法、測定装置、測定制御プログラム
【課題】 部材の3次元位置の測定に係る煩雑さを軽減させることができる測定方法、測定装置、測定制御プログラムを提供する。
【解決手段】 平面に載置された対象部材をカメラにより撮像し、撮像した撮像画像を取得し、取得した撮像画像において、対象部材を含む領域として指定された領域の画像を第1テンプレートとしてメモリに保存し、第1テンプレートと撮像画像とのマッチングに基づいて、対象部材のカメラと対向する面の位置である面内方向位置を検出し、センサによって面内方向の2次元配列のそれぞれにおける面外方向位置データを取得し、取得した面外方向位置データに基づいて、2次元配列のそれぞれにおける面外方向位置データを画素値により表現する面外方向画像を生成し、生成した面外方向画像の縦横比を所定の比率に基づいて補正し、補正した面外方向画像と第1テンプレートとのマッチングに基づいて、対象部材の面外方向の位置を検出する。
(もっと読む)
3次元物体認識装置、並びに3次元物体認識プログラム及びこれが記録されたコンピュータ読み取り可能な記録媒体
【課題】 2次元画像における輪郭などの特徴から3次元物体を認識する3次元物体認識装置において、隠れの影響を排除してロバスト性を向上させるとともに、位置及び姿勢を最適化して認識精度を高める手段を提供する。
【解決手段】 本発明に係る3次元物体認識装置は、3次元物体を撮影するカメラと、3次元物体の位置及び姿勢を変化させながらカメラ画像に投影し、各投影点の座標及びエッジの向きを算出する手段と、それに基づいて作成したルックアップテーブルを記憶する手段と、ピラミッド画像を作成する手段と、解像度が最も低いピラミッド画像についてエッジを抽出する手段と、方向付きディスタンスマップを作成する手段と、方向付きディスタンスマップ上に各投影点をマッピングする手段と、位置及び姿勢を評価する手段と、位置及び姿勢を最適化する手段と、を備えるものである。
(もっと読む)
製品形状の検査システム
【課題】欠けの位置、形状、またはサイズ等の影響による誤検出を極力排して高精度に欠けを検出することができる製品形状の検査システムを提供する。
【解決手段】検査対象に生じた形状の欠陥を検出するための製品形状の検査システムであって、以下の構成を備える。距離画像撮像手段(距離画像カメラ130):検査対象までの距離情報を画像として表示する距離画像データを得る。高さプロファイル抽出手段:距離画像データに基づいて、検査対象の表面における高さプロファイルを抽出する。差分プロファイル演算手段:前記高さプロファイルと良好な高さプロファイルである基準プロファイルとの差分データを求める。判定手段:前記差分データに基づいて、検査対象の形状に欠陥があるか否かを判定する。
(もっと読む)
不良検査装置
【課題】不良検査装置において、簡単な構成により、箱の外形の良・不良を効率的に検査可能とする。
【解決手段】不良検査装置1は、箱Bの検査対象とする面10に対して複数本のスリット光Lを照射する光源部2と、光源部2により照射されたスリット光Lを撮像するカメラ部3と、カメラ部3によって撮像された画像Gを処理して箱Bの良・不良を判定する画像処理部4と、を備えている。画像処理部4は、検査対象面10のエッジ(すなわち、角部の辺、面の境界)に相当する各スリット光Lの像(単にスリット光Lとも記す)の端点L0の位置(端点位置L0とも記す)を検出し、検出された各スリット光Lの端点位置L0が予め設定された許容範囲5から外れている端点の個数を不良候補点として計数し、前記計数値が所定の値以上であれば当該箱Bが不良であると判定する。
(もっと読む)
81 - 100 / 322
[ Back to top ]