
Fターム[2F065QQ32]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | 信号補正;輪郭強調 (1,212)
Fターム[2F065QQ32]の下位に属するFターム
Fターム[2F065QQ32]に分類される特許
41 - 60 / 322
表面形状の評価方法および評価装置
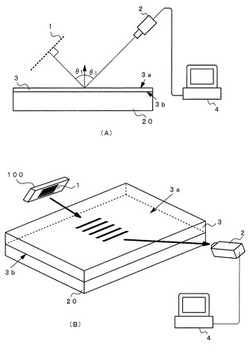
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、被評価物体3の裏面3bには、屈折率が被評価物体3の屈折率に近い反射抑制層20が、裏面3bに接するように配置されている。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
帯状部材の外観形状検査方向及びその装置

【課題】帯状部材の外観形状が帯状部材の長さ方向にどのように変化しているかを知ることのできる帯状部材の外観形状検査方法及びその装置を提供する。
【解決手段】この帯状部材の外観形状検査装置は、検出された二次元輪郭データを帯状部材の長さ方向に並べて検査用データを作成し、該検査用データから、各二次元輪郭データが示す帯状部材の外観形状の輪郭が帯状部材の長さ方向にどの様に変化するかを示す帯状部材の外観形状の特徴データを抽出する。このため、検査用データから抽出された前記各特徴データは帯状部材の厚さや、帯状部材の幅方向端部位置等が、帯状部材の長さ方向にどの様に変化するかを示すことになるので、帯状部材の外観形状が帯状部材の長さ方向にどの様に変化しているかを知ることができ、タイヤ特性の向上を図る上で極めて有利である。
(もっと読む)
対象体認識方法と装置
【課題】対象体の形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する場合に、対象体領域の外周部付近に不明瞭な形状部分が発生する可能性を低くする。
【解決手段】計測点から対象体上の各被計測点までの距離を計測することにより、または、対象体を撮像することにより、対象体の形状データを取得する形状データ取得ステップS1と、形状データに基づいて、仮想座標空間において対象体が占める対象体領域を生成する領域生成ステップS2と、生成した対象体領域に対し修正処理を行う領域修正ステップS3とを有する。修正処理は、縮小処理および拡大処理の少なくとも一方を含む。対象体領域の外周部分または内周部分を処理対象領域とし、(A)縮小処理は、対象体領域内に含まれる処理対象領域を対象体領域から削除する処理であり、(B)拡大処理は、対象体領域外に位置するとともに該対象体領域に隣接する処理対象領域を対象体領域に統合する処理である。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】輪郭線近傍の欠陥であっても高い精度で存在を検出することができ、高い精度で良品判定を行うことができる画像処理装置、画像処理方法、及びコンピュータプログラムを提供する。
【解決手段】取得した各第一の多値画像の画素ごとに、異なる二方向におけるエッジ強度を算出し、各第一の多値画像の画素ごとに、異なる二方向におけるエッジ強度の平均値を算出する。算出した平均値を中心として、各第一の多値画像の画素ごとに、異なる二方向におけるエッジ強度の相互相関分布領域を算出する。判定対象物に関する第二の多値画像の画素ごとに、異なる二方向におけるエッジ強度を算出し、算出した第二の多値画像の画素ごとのエッジ強度が、算出してある各第一の多値画像の画素ごとのエッジ強度の相互相関分布領域に含まれているか否かを判断する。
(もっと読む)
帯状材料の周期性欠陥検査方法および装置
【課題】帯状材料に発生する周期性欠陥の有害度を適正に判定することができる帯状材料の周期性欠陥検査方法および装置を提供する。
【解決手段】搬送中の帯状材料の表面欠陥を検出し、検出した表面欠陥のうち、搬送方向に周期性を有する一群の欠陥を周期性欠陥として抽出し、抽出したそれぞれの周期性欠陥について少なくとも欠陥の発生する幅方向位置と欠陥サイズと搬送方向の欠陥発生ピッチとを含む特徴量を算出し、前記帯状材料のコイル毎にそれぞれの周期性欠陥が発生する搬送方向の起点位置と消滅する終点位置との差である発生長さを算出し、連続する複数のコイル内で抽出された前記周期性欠陥のうち、少なくとも前記幅方向発生位置及び欠陥発生ピッチが略同じものを一つの周期性欠陥と判定し、各コイル内の欠陥発生長さの総和である欠陥発生累積長さを求め、前記特徴量と前記欠陥発生累積長さとに基づいて前記周期性欠陥の有害度を判定する帯状材料の周期性欠陥検査方法である。
(もっと読む)
結像光学系及び形状測定装置
【課題】ズームレンズの変倍動作により移動する入射瞳の位置に対物レンズの射出瞳の位置を略一致させるように構成された結像光学系、及び、この結像光学系を有する形状測定装置を提供する。
【解決手段】形状測定装置100に用いられる結像光学系30は、測定物体の像を結像する対物レンズ25と、この像を変倍するズームレンズ32と、変倍動作により光軸に沿って移動するズームレンズ32の入射瞳の位置に、対物レンズ25の射出瞳の位置を略一致させる瞳移動光学系としてのリレーレンズ31と、を有する。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
形状測定装置
【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物をライン光で照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータ17と、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28とを備え、振れ検出部28に検出された振れに基づいて測定の補正を行うようになっている。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】カラーコードターゲットCTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3と、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して第1の撮影画像F3Bを得、照明された測定対象2を撮影して第2の撮影画像F3Aを得る撮影部4と、第2の撮影画像F3Aに対する補色関係にある補色画像又は第2の撮影画像F3Aに対するネガ画像を形成し、形成された補色画像又はネガ画像を投影用ターゲット画像F1に合成して投影用ターゲット画像F1を補正する第1の画像処理部8とを備える。
(もっと読む)
測定波形の補正方法
【課題】測定波形のマスター波形に対する位置補正を精度よく行ことが可能な測定波形の補正方法を提供する。
【解決手段】測定波形10の補正方法は、マスター被測定物の二次元形状を測定するとともに、被測定物1の二次元形状を測定する工程と、マスター波形20を生成するとともに、測定波形10を生成する工程と、マスター波形2の頂点の形状データ「Bv」のX座標「Xbm」、および測定波形10の頂点の形状データ「Av」のX座標「Xam」を算出する工程と、測定波形10のX座標「Xam」がマスター波形20のX座標「Xbm」と等しくなるように、測定波形10をX軸方向に平行移動する工程と、マスターZ平均値「Zbv」を算出するとともに、Z平均値「Zav」を算出する工程と、測定波形10のZ平均値「Zav」がマスター波形20のマスターZ平均値「Zbv」と等しくなるように、測定波形10をZ軸方向に平行移動する工程と、を備える。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
3次元位置合わせにおける照合方法およびそのプログラム
【課題】精度よく3次元位置合わせが可能な照合方法及びプログラムを提供すること。
【解決手段】対象物の画像データから第1及び第2の3次元復元点集合、第1及び第2特徴量集合を求めるステップS2〜4と、
第1及び第2特徴量集合を照合して、第1及び第2の3次元復元点集合の対応点を決定するステップS5〜10とを含み、
第1及び第2の3次元復元点集合がセグメントの3次元位置座標を含み、
第1及び第2特徴量集合がセグメントの頂点に関する3次元情報を含み、
ステップS5で、第1及び第2の3次元復元点集合のセグメントの初期照合を行い、
ステップS6で、第1特徴量集合の中から特徴点を選択し、
ステップS7で、選択された特徴点を含む調整領域を指定し、
ステップS8において調整領域に含まれる第1及び第2の3次元復元点集合のセグメントに関して照合の微調整を行い、
調整領域を拡大及び特徴点を選択する毎にステップS6〜8を実行する。
(もっと読む)
検査装置および検査方法
【課題】光学画像のパターンと基準画像のパターンとの位置合わせを高い精度で行いつつ、且つ、高速で欠陥検出のできる検査装置および検査方法を提供する。
【解決手段】画像センサから試料の光学画像を取得する工程と、光学画像および判定の基準となる基準画像のいずれか一方について、そのX方向とY方向の移動量をそれぞれα(0≦α<1)とβ(0≦β<1)として、αおよびβと光学画像と基準画像の差分の2乗和との関係を表す方程式を求める工程と、この方程式から得られる差分の2乗和が最小となる(α,β)の組から、位置合わせに最適な移動量を求める工程とを有する。この方程式についてαおよびβの偏微分を解くことにより、位置合わせに最適な移動量を求めてもよい。
(もっと読む)
半導体装置の接合傾き測定装置
【課題】半導体装置の半導体チップ接合傾きを効率的かつ正確に測定する装置及び方法を提供すること。
【解決手段】基板に半導体チップを実装した半導体装置の接合部傾き測定装置であって、該半導体装置を測定のために搭載する検査ステージ部と、該半導体装置に可視光線を照射するための照明部と、該基板と該半導体チップの接合部を側面から撮像するためのカメラと、端面検出部と配置計測部とを含む画像計測部と、を含み、該端面検出部は該カメラにより撮像された入力画像から半導体チップ側面部分および該基板のレジスト面に反射された該半導体チップ側面部分の反射画像を画像処理にて検出し、該配置計測部は該端面検出部により検出された該半導体チップ側面部分及び該半導体チップ側面部分の反射画像をもとに該半導体チップ側面部分の下端部の該基板レジスト面に対する傾きを測定する。
(もっと読む)
撮像用パターン
【課題】拡大して撮像した場合であっても基準線に位置決めパターンを容易に合わせることができる撮像用パターンの提供。
【解決手段】撮像用パターン1は、画像機器に撮像される際に、2本の基準線L1,L2に合わせることによって、画像機器に対する位置決めをするための位置決め用パターン13を備えている。位置決め用パターン13は、撮像用パターン1の中心から縦横方向に沿って所定の間隔で複数の図形を配置したパターンとして構成されている。具体的に、各図形は、直角三角形状の暗領域とされ、各図形のうち、縦方向に沿って設けられる各図形は、縦方向に平行な辺13Aを一辺のみ有する図形とされ、横方向に沿って設けられる各図形は、横方向に平行な辺13Bを一辺のみ有する図形とされている。また、各辺13A,13Bの延長線は、撮像用パターン1の中心を通っている。
(もっと読む)
計測方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】位置計測系の周期誤差が発生しても、精度良く周期パターンの位置を検出する。
【解決手段】可動ステージの位置を位置計測系を用いて計測し、その計測情報を用いて可動ステージを駆動するとともに、可動ステージ外の周期パターンから成る計測用マークを可動ステージに一部が配置された検出器を用いて検出する。ここで、位置計測系の計測周期(図10(B)及び10(C)に示される例では0.25μm)の自然数倍と異なるピッチ(図10(C)の例では2.03125μm(なお、図10(B)の例では2μm))の周期パターンを計測用マークとして用いることにより、計測周期に等しい位置計測系の周期誤差が発生しても、検出精度を損なうことなく、計測用マークの位置情報を計測することが可能となる。
(もっと読む)
複眼カメラおよびカメラ応用機器
【課題】視野角を拡大した画像を生成すると共に、カメラ画像から同程度の視野角の被写体の距離を測定可能とした複眼カメラを提供し、新たな機能の実現や低コストで高性能なカメラ応用機器を提供する。
【解決手段】水平画角αの同一の2つのカメラa、bのレンズ中心を含む平面上でカメラa,bの光軸を水平画角αと同じ角度αで交差するように配置し、画像を合成することで、2αの視野のワイド画像を生成し、距離測定をできる。さらに同様の配置を行う4眼カメラの場合、垂直方向も2βの視野の画面を生成でき、距離測定範囲も同様に拡大できる。また背景画像を記憶し移動物・人物抽出部により背景の変化を記録することで、送信や記録の画像情報データ量を削減すると同時に忘れ物記憶や置き場所当てゲームなどができ、また動き出部情報から人物の体形情報を成長記録として残せ、また教師の動き情報との比較からダンス等の採点などの機能を提供できる。
(もっと読む)
測定顕微鏡
【課題】本発明は、比較的安価で狭視野なテレセントリックレンズなどの光学系レンズを使用して高精度、かつ全体を見渡した測定を行うことが可能となる測定顕微鏡に関するものである。
【解決手段】本発明は、ステージ1上に載置された被検物Bを撮影するために光学系レンズ5を装着した被検物撮影カメラ2と、前記被検物B周辺を含んで撮影する周辺撮影カメラ4とを設置し、前記周辺撮影カメラ4で撮影した映像内に前記被検物撮影カメラ2で撮影した映像を出力した測定顕微鏡Aである。
(もっと読む)
推定装置及びその制御方法、プログラム
【課題】 三次元的に任意の位置姿勢をとりうる物体の位置姿勢を高精度かつ高速に推定するための技術を提供する。
【解決手段】 物体の位置姿勢を推定する推定装置であって、位置姿勢を推定する対象の対象物体を撮像する撮像手段であって、当該撮像手段から該対象物体までの距離情報を表す距離画像を生成する撮像手段と、前記距離画像を解析して前記対象物体の概略の位置姿勢を推定する概略推定手段と、予め定められた位置姿勢の範囲で物体の詳細な位置姿勢を推定する複数の識別手段と、前記概略推定手段が推定した前記概略の位置姿勢に基づいて、前記複数の識別手段の優先順位を決定する決定手段と、前記決定手段が決定した優先順位の順に、前記複数の識別手段を使用して前記対象物体の詳細な位置姿勢を推定する詳細推定手段とを備える。
(もっと読む)
41 - 60 / 322
[ Back to top ]