
Fターム[2F065QQ32]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | 信号補正;輪郭強調 (1,212)
Fターム[2F065QQ32]の下位に属するFターム
Fターム[2F065QQ32]に分類される特許
21 - 40 / 322
ひずみ測定装置およびひずみ測定方法
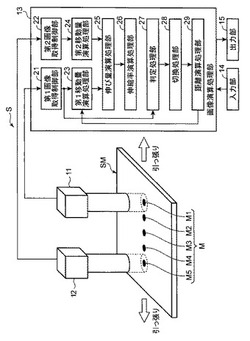
【課題】本発明は、分解能を維持しつつ測定範囲をより広げ得るひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明では、複数のマークMを備える試験体SMに外力を作用させる前後における試験体SMの画像が、外力作用前画像および外力作用後画像として第1カメラ装置11によって得られ、追跡マークMcとされる、前記複数のマークMのうちの1つのマークMの位置および所定の基準位置の間の基準距離と、前記外力作用前画像における追跡マークMcの位置と、前記外力作用後画像における追跡マークMcの位置とに基づいて、試験体SMの伸縮率が求められる。ここで、追跡マークMcが外力作用後画像での所定の端部領域内に位置する場合には、複数のマークMのうちの前記追跡マークMcと異なって前記端部領域外に位置するマークMを新たな追跡マークMcとするものである。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム

【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
シート材端部の観察評価装置及び方法
【課題】 高価な位置検出器を取り付けることなく、シート材端部の観察画像が常に最適状態にある観察装置及び方法、並びに、観察画像を用いた評価結果にばらつきが生じることを防ぐことができる観察評価装置及び方法を提供する。
【解決手段】 連続搬送されるシート材端部を第1及び第2の観察手段を用いて観察評価する装置及び方法において、
第1の観察手段は、シート材の幅方向端部を視野に含み、厚み方向にシート材端部との距離が変更可能な第1の観察手段位置変更機構に取り付けられ、
第2の観察手段は、シート材の厚み方向端部を視野に含み、幅方向にシート材端部との距離が変更可能な第2の観察手段位置変更機構に取り付けられており、
第1及び第2の観察手段での観察情報に基づき、シート材の幅及び厚み方向端部の位置を検出し、第1及び第2の観察手段位置変更機構を制御することを特徴とするシート材端部の観察評価装置及び方法である。
(もっと読む)
移動量推定装置および移動量推定方法
【課題】移動体の移動量を精度よく推定する装置または方法を提供する。
【解決手段】移動量推定装置は、投影部、抽出部、推定部を備える。投影部は、移動体に取り付けられた複数のカメラにより得られる各映像についてそれぞれ路面投影像を生成する。抽出部は、投影部により生成される複数の路面投影像において複数のカメラの視野が重複する共通視野領域から、路面投影像間で互いに一致する画像パターンを抽出する。推定部は、抽出部により抽出される画像パターンの時間変化に基づいて、移動体の移動量を推定する。
(もっと読む)
高さ測定方法および電子ビーム描画装置
【課題】試料の高さを正確に測定することのできる高さ測定方法と、高さを正確に測定して高い精度で描画することのできる電子ビーム描画装置とを提供する。
【解決手段】光の波長を所定値としたときの反射光の光量を測定し、光量が閾値以下である場合には光の波長を変えて反射光の光量を測定する工程を繰り返し、光量が閾値より大きくなる波長で試料の高さを測定する。あるいは、光の波長を変えて反射光の光量を測定し、光量が最大となる波長で試料の高さを測定する。
(もっと読む)
エッジ検出方法およびエッジ検出装置
【課題】凸レンズの周縁の形状を簡易な構成で精度良く検出することができるエッジ検出方法およびエッジ検出装置を提供すること。
【解決手段】凸レンズ100を撮像する撮像部2を用いて凸レンズ100の周縁の形状を検出させるためのエッジ検出方法であって、出射開口11aが形成されたマスク11の出射開口11aを通じて撮像部2へ向けて拡散光を発し、出射開口11aと撮像部2との間の撮像光学系3の被写界深度内に凸レンズ100を配置し、撮像部2の撮像面4aに、拡散光が凸レンズ100を透過して撮像部2へ入射した第一拡散光L1と、拡散光が凸レンズ100の外部を通って撮像部2へ入射した第二拡散光L2とによってマスク11の像を投影させ、第二拡散光L2による明部とマスク11の像による暗部との境界の形状に基づいて凸レンズ100の周縁の形状を検出することを特徴とする。
(もっと読む)
画像データ処理システム
【課題】長い距離にわたるコンクリート壁面などのコンクリート構造物の診断を、安価にしかも短時間で行うことが可能な画像データ処理システムを提供する。
【解決手段】移動式架台10に搭載された可視画像撮影用カメラ60と赤外線カメラ70と、最初の可視画像データ及び赤外線画像データに撮影された対象物上の基準点に基づいて、前記複数の可視画像データ及び赤外線画像データの位置関係を求め、前記最初の可視画像データ及び赤外線画像データに対して、あおり補正を施した上で、2番目以降の規格化可視画像データ及び規格化赤外線画像データを、前記位置関係に基づいて重畳し2番目以降の重畳データとし、前記最初の重畳データと前記2番目以降の重畳データとを連結することを特徴とする。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
工具寸法の測定方法及び測定装置、並びに工作機械
【課題】ワークの加工精度をより一層向上させることができる工具寸法の測定方法及び測定装置、並びに工作機械を提供する。
【解決手段】工作機械において、撮像装置は、送り方向に移動中の工具を撮像する。撮像に基づき生成された複数の画像データの各々で輪郭線51が特定される。この輪郭線51に基づき工具の移動軌跡52及び中心軸線53が特定される。移動軌跡52と中心軸線53との間にずれがある場合には、そうしたずれは工作機械で工具の位置決めの補正に用いられることが可能である。その結果、ワークの加工精度は向上する。また、例えば傾斜姿勢の工具の寸法が測定されれば、傾斜姿勢における実際の刃先位置や工具径が特定されることが可能である。こうした刃先位置や工具径は工作機械の位置決めの補正に用いられることが可能である。ワークの加工精度はさらに向上する。
(もっと読む)
工具寸法の測定方法及び測定装置
【課題】想定外の工具であっても簡単に測定部位を特定することができる工具寸法の測定方法及び測定装置を提供する。
【解決手段】本発明に係る工作機械によれば、表示画面S上には工具20の輪郭線51が表示される。寸法測定の操作者がタッチパネルの表示画面S上で輪郭線51を指で辿って接触教示すれば、表示画面S上で工具の測定部位すなわち輪郭線51が自動的に特定されることが可能である。こうして操作者は極めて簡単に工具20の寸法を測定することができる。加えて、操作者が例えば工具20の輪郭線51の特定の位置を指定することによって工具20の工具径や刃先位置が自動的に測定されることが可能である。従って、こうした工具の寸法測定方法によれば、例えば多段工具などの複雑な輪郭線を有する想定外の工具の測定部位が簡単に特定されることが可能である。
(もっと読む)
車高計測装置
【課題】運転者自らが計測することなしにトレーラの実際の車高を計測することのできる車高計測装置を提供することを目的とする。
【解決手段】自車両の周囲の撮影画像を画像処理する画像処理手段11と、この画像処理手段11による処理画像に基づいて自車両が牽引するトレーラの車高を算出する算出手段13とを備え、算出手段13は、画像処理手段11が画像処理した自車両前方の撮影画像および自車両が牽引するトレーラ後方の撮影画像とに基づいて自車両が牽引するトレーラの車高を算出する。
(もっと読む)
撮像式工具測定装置および測定方法
【課題】撮像環境の変化を検出し、工具寸法を高精度に測定できるように撮像条件を自動的に調整したり、画像を補正するようにした、撮像式工具測定装置および撮像式工具測定方法を提供する。
【解決手段】撮像部12からの工具像にかかる信号、または画像前処理部20からの処理信号に基づいて撮像環境・条件を検出する撮像環境・条件検出部25と、撮像環境・条件検出部25の検出情報を基に、撮像の適正条件を判断し、調整指令を導出する撮像条件判断・調整指令部27と、前記撮像条件判断・調整指令部27からの調整指令信号により、撮像条件を調整する調整手段と、を具備する。
(もっと読む)
開眼状態検出装置
【課題】開眼状態の検出精度低下を防止することができる開眼状態検出装置を提供する。
【解決手段】画像情報に基づいて開眼状態を検出する開眼状態検出装置1であって、前記画像情報に基づいて上瞼の位置及び下瞼の位置を検出する瞼候補選定部23及び瞼検出部24と、上瞼の位置及び下瞼の位置に基づいて開眼状態を検出する開眼状態検出部25と、を備え、瞼候補選定部23及び瞼検出部24は、瞳孔を透過し網膜で反射される光によって発生する赤目領域の前記画像情報が検出結果に与える影響を他の領域の前記画像情報よりも小さくすることを特徴として構成する。
(もっと読む)
欠陥検査装置およびその方法
【課題】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置において、膜厚の違いなどから生じるパターンの明るさむらの影響を低減して、高感度なパターン検査を実現する。また、多種多様な欠陥を顕在化でき,広範囲な工程への適用が可能なパターン検査装置を実現する。
【解決手段】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置を、複数の検出系とそれに対応する複数の画像比較処理方式を備えて構成し、又、異なる複数の処理単位で比較画像間の画像信号の階調を変換する手段を備えて構成し、画像間の同一パターンで明るさの違いが生じている場合であっても、正しく欠陥を検出できるようにした。
(もっと読む)
多結晶シリコン薄膜の検査方法及びその装置
【課題】多結晶シリコン薄膜の表面の画像を検出して多結晶シリコン薄膜の表面の状態を観察し、多結晶シリコン薄膜の結晶の状態を検査することを可能にする。
【解決手段】多結晶シリコン薄膜の検査装置を、表面に多結晶シリコン薄膜が形成された基板100に光を照射する光照射手段800と、光照射手段800により基板100に照射された光のうち多結晶シリコン薄膜を透過した光または多結晶シリコン薄膜で正反射した光の近傍の多結晶シリコン薄膜からの散乱光の像を撮像する撮像手段820と、この撮像手段820で撮像して得た散乱光の画像を処理して多結晶シリコン薄膜の結晶の状態を検査する画像処理手段740とを備える。
(もっと読む)
トングレール接触状態測定装置およびトングレール摩耗量測定装置
【課題】レール分岐部分において、作業者の勘に頼らなくても高い精度でトングレールの先端を含めたこれの基本レールに対する接触状態でのレール頭面形状を効率的かつ連続的に測定できるトングレール接触状態測定装置およびトングレール摩耗量測定装置を提供することにある。
【解決手段】この発明は、ブリッジ部材の端部を第2のレールにクランプ固定するクランプ部材を設けることで第1のレールと第2のレールとの間のブリッジ構造で直線移動機構を第2のレールに支持しかつ第1のレールに対して固定状態で支持することができる。これによって、直線移動機構の移動台を移動させる二次元変位センサによって第1のレールとこれに接触するトングレールとの頭面形状についての測定信号をレール長さ方向に連続的に得ることができる。この測定信号によってトングレール摩耗量測定をも測定することができる。
(もっと読む)
欠陥検査方法及びその装置
【課題】半導体ウェハ上に形成されたチップ内の直接周辺回路部の近辺に存在する致命欠陥を高感度に検出することができる欠陥検査装置及びその方法を提供する。
【解決手段】被検査対象物を所定の光学条件で照射する照明光学系と、被検査対象物からの散乱光を所定の検出条件で検出して画像データを取得する検出光学系とを備えた欠陥検査装置において、前記検出光学系で取得される光学条件若しくは画像データ取得条件が異なる複数の画像データから領域毎に複数の異なる欠陥判定を行い,結果を統合して欠陥候補を検出するようにした。
(もっと読む)
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
(もっと読む)
ワーク外形形状検出方法及び画像処理システム
【課題】
安価なモノクロカメラを使用するとともに撮像画像の画像データ処理を少なくして画像処理を高速に行うことができ、撮像時にワークの影が発生してもワーク外形の検出に影の影響を排除することができ、低コストでワーク外形検出方法及び画像処理システムを提供する。
【解決手段】
第1ステップで取得した撮像画像を床面と支持部の中間値の輝度を閾値として二値化し、二値化した画像データをマスクデータにする。支持部の表面の明度と同レベルの明度を有するワークを、支持部に支持した状態でモノクロカメラによりワーク台とともに撮像し、ワーク撮像画像を取得する。ワーク撮像画像から、マスクデータにおける支持部に関する画像領域52,54を消去して支持部消去画像を取得する。支持部消去画像から、支持部消去部分を含んだワーク外形線57を抽出し、支持部消去部分を補間処理してワーク外形線58を取得する。
(もっと読む)
欠陥検出方法、欠陥検出装置、学習方法、プログラム、及び記録媒体
【課題】実質的に同程度の時間及び正確さで、異なる画像の欠陥検出を実行する。
【解決手段】本発明に係る欠陥検出方法は、工業用部品に関する入力画像を受け取るステップと、上記入力画像に関するモデルタイプを受け取るステップと、上記モデルタイプに対応するモデル画像を取得するステップと、上記モデル画像と上記入力画像との間の画像間変換を推定するステップと、上記推定された画像間変換に基づいて上記モデル画像及び上記入力画像を共通座標系に変換することによって位置合わせされた入力画像と位置合わせされたモデル画像とを取得するステップと、上記入力画像及び上記モデル画像に関する複数の画像差分ベクトルを形成するステップと、上記入力画像に関するラベルされた分類マップを生成する統計分類モデルを、上記複数の画像差分ベクトルに対して適用するステップと、を含んでいる。
(もっと読む)
21 - 40 / 322
[ Back to top ]