
Fターム[2F065QQ38]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 画像処理(1次元を含む) (5,599) | パターンマッチング (1,160)
Fターム[2F065QQ38]の下位に属するFターム
標準パターンとの (300)
Fターム[2F065QQ38]に分類される特許
841 - 860 / 860
ステレオ画像処理装置
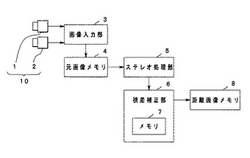
【課題】ステレオマッチング処理におけるマッチング処理を高精度にする。
【解決手段】 対象物を撮像する撮像手段1,2と、前記撮像手段で撮像した一対の画像の小領域毎に、互いの相関を求めることで対応する領域を特定するステレオマッチング処理を行い、ステレオマッチング処理結果である評価関数、該評価関数に基づいて得られる前記対象物までの距離情報及びその信頼度を示す信頼度情報を取得するステレオ処理手段5と、前記信頼度に応じて対象となる小領域の周辺に再探索範囲を設定し、前記再探索範囲内の小領域について求めた前記評価関数に基づいて、前記対象となる小領域について求めた評価関数を修正して修正評価関数を求め、求めた修正評価関数に基づいて距離情報を補正する視差補正手段6とを備えたことを特徴とする。
(もっと読む)
3次元計測装置、3次元計測方法、および記録媒体

【課題】 高精度でノイズの影響を受けにくく、更にステレオカメラの複数のカメラ間における調整の差異や光源の変動に影響されることなく、監視対象の位置を表す3次元情報を計測することが可能な3次元計測装置を提供する。
【解決手段】 所定の監視対象を撮像する撮像装置101、102と、撮像装置101、102のそれぞれが撮像して得られたそれぞれの画像信号の濃度を変換する画像変換装置10と、画像変換装置10によって変換されたそれぞれの画像信号に基づいて監視対象の位置を表す3次元情報を算出する3次元情報算出装置108とを備える。
(もっと読む)
周波数偏移干渉法のための位相分解測定
周波数偏移干渉計が様々な測定ビーム周波数においてつくられた干渉パターンのセットから強度データを収集する。対応する測定ビーム周波数範囲にわたる干渉パターンのセットから収集された強度データに周期関数が合せられる。測定ビームの干渉部分間の位相オフセットにかかわる局所相関が、干渉するビーム部分間の光路長差に対応する測定ビーム周波数にともなう位相変化のレートの決定を示すために用いられる。  (もっと読む)
(もっと読む)
較正方法及び位置合わせ方法
【課題】高精度に物体を位置合わせする。
【解決手段】工具ウエハを搬送するロードスライダ上のマークの撮像結果P内における較正用基準点SpCT2と、その基準点SpCT2からの位置関係が既知な地点P1〜P6の位置情報を検出し、これらの地点の、設計上の位置関係と、撮像結果から得られる位置関係との違いに基づいて、そのマークを撮像する撮像装置の倍率、回転などの較正情報を例えば、最小二乗法などの統計的手法を用いて、精度良く算出する。
(もっと読む)
3次元画像測定装置および方法
【課題】 計算量を増大させることなく凹凸の多い物体等に適切な解像度の3次元画像を得る。
【解決手段】 プロジェクタから第1の投影パターンを投影し(S10)、2台のカメラでその様子を撮影する(S11)。得られた画像から距離画像を算出する(S12)。この距離画像に対して水平方向の傾斜情報の評価を行し傾斜が急な部分や凸凹が細かく連続する部分などを抽出する(S13)。抽出した領域を領域テンプレートに当てはめ、第2の投影パターンを1つあるいは複数選択する(S14)。選択された投影パターンを投影して(S15)、2台のカメラでその様子を撮影し(S16)、得られた画像から距離画像を算出する(S17)。第2の投影パターンが複数選択された場合はこれを繰り返す(S18)。最後にそれぞれ算出された距離画像(点群データ)を合成して最終的な出力を得る(S19)。
(もっと読む)
空間シミュレータ、空間シミュレート方法、空間シミュレートプログラム、記録媒体
【課題】 現実感ある仮想空間を容易に生成できる空間シミュレータを提供する。
【解決手段】 対象空間についての複数の画像から該対象空間に関する視差情報を抽出する視差情報抽出部5(視差情報抽出手段)と、上記視差情報から距離情報を算出する距離情報算出部6(距離情報算出手段)と、該距離情報に基づいて上記対象空間を複数のレイヤに分割するレイヤ分割部8(レイヤ分割手段)と、上記画像から得られる画像データおよび上記距離情報に基づいて、レイヤ毎にレイヤ表現データを生成するレイヤ表現データ生成部10(レイヤ表現データ生成手段)と、上記各レイヤ表現データに基づいて上記対象空間の空間表現データを作成する空間表現データ作成部11(空間表現データ作成手段)とを備える。
(もっと読む)
移動体周辺監視装置
【課題】ステレオ画像に基づいて物体を検出する際、計算時間の短縮と計算コストの低廉化を図る。
【解決手段】基準カメラ12により基準画像Ibを撮像し、参照カメラ14により参照画像Irを撮像する。基準画像Ib及び参照画像Irから平面領域Πfを抽出する。基準画像Ibからエッジや特徴点を抽出したエッジ画像を作成し、平面領域Πfを除去した修正エッジ画像62を生成する。修正エッジ画像62のエッジや特徴点に対して参照画像Irを参照しながら物体検出処理を行う。
(もっと読む)
光学式マウスにおける埃汚れの低減
【課題】 光学式マウスの動作感知の精度が埃によって低下しないようにする。
【解決手段】 光学式マウス(1)用の改良型モーションセンサであって、このセンサは光学素子(3、7)を有しており、この光学素子は少なくとも1つの導電性の表面を有していることを特徴とする。
(もっと読む)
画像式スケール
【課題】 画像式スケールで、レーザ光を用いた光学式スケールと同等の精密な測定ができ、測定長を長くできるとともに、ずっと低価格にできること。
【解決手段】 画像式スケール1においては、模様データ記憶手段8Aから高精度温度センサ6で測定されたスケール板3の温度に対応する模様データが呼び出され、移動体2の現位置における画像センサ4の撮像データと模様データが位置演算手段8Bで照合され、スケール板3上の絶対位置が演算・特定されてその数値が記憶される。移動体2が移動して停止した位置において、再び画像センサ4の撮像データと模様データが位置演算手段8Bで照合されて、スケール板3における絶対位置が演算・特定されてその数値から記憶された原点の数値を引いた移動量が算出されて、パソコン8のディスプレイ9に表示される。このようにして、移動体2の移動量が高精度(±1.0μm以内)で測定され、表示される。
(もっと読む)
義歯部品を製造するための装置及び方法
本発明は、歯根又はインプラント支柱のような少なくとも一つの義歯土台オブジェクト及びその周辺の三次元データを写像するための装置、並びに、義歯土台オブジェクトの三次元データを取り入れた、義歯部品をデータを用いて生成及び製造するための装置を備えた表面写像及び/又は生成のための装置に関する。かかる装置にあっては、義歯土台オブジェクト上に押しつけられる義歯部品の挿入方向を演算及び/又は決定するための装置、及び、義歯部品の前に義歯土台オブジェクト上に押しつけられ、この押しつけのための挿入方向とは異なった義歯部品の所要の挿入方向を生じさせるための支台部品を算定及び製造するための装置が備えられ、さらには義歯部品をデータを用いて生成及び製造するための装置が支台部品の三次元データを取り入れて生成及び製造するように設計されている。
また、本発明は、歯根又はインプラント支柱のような義歯土台オブジェクト及びその周辺から三次元データが写像され、それからこの義歯土台オブジェクトの三次元データに基づいて、その上に押しつけられる義歯部品が製造される、表面写像及び/又は生成のための方法に関する。かかる方法にあっては、義歯部品を製造する前に、義歯土台オブジェクト上への義歯部品の挿入方向が演算及び/又は決定され、この義歯土台オブジェクトの三次元データに基づいて、義歯部品の所要の挿入方向とは異なった義歯土台オブジェクト上への挿入方向を有する支台部品が算定及び製造され、そして、支台部品上に押しつけるに適した義歯部品が、その三次元データに基づき、データに従って生成及び製造される。  (もっと読む)
(もっと読む)
計測用内視鏡装置
【課題】計測対象を撮像して元画像として読み取り、読み取った元画像上の計測点の位置に基づいて計測を行う計測用内視鏡装置において、容易に計測点の指定が可能であり、高精度な計測を行うことができる計測用内視鏡装置を提供する。
【解決手段】 計測対象を撮像して得られた元画像に対し、例えば拡大画像生成処理を行い、計測点を指定する際、大きく移動する場合には元画像の画素間隔の指定を行い、詳しく詳細な移動を行うためには元画像の画素間隔より細かな指定を行い、効率よく測定点の指定を行う計測用内視鏡装置である。また、上記設定を切り換え可能とすることによって、より容易に計測点の指定を行うことが可能となる。例えば、計測点が離れている場合、移動量を画素間隔として迅速に指定点を計測点に近づけ、その後移動量の単位を画素間隔より細かい設定に切り換え、指定点を正確に計測点に近づけ、ユーザによる計測点の指定を容易に行わせる。
(もっと読む)
計測システムおよび計測方法
【課題】 撮影手段の撮影条件に関するパラメータを、より容易に算出させる。
【解決手段】 計測領域内の道路上を直線的に移動ながら通過する試験車両5を、計測領域を撮影するカメラで撮影し、その試験車両5の撮影画像に基づいて、カメラの撮影条件に関するパラメータを算出するとともに、算出したパラメータを用いて車両の速度などを計測する。計測領域内の道路上を直線的に移動ながら通過する試験車両5の撮影画像を用いてパラメータを算出することができるため、予め道路上に基準物を設置する等の困難を要する作業を省くことができる。
(もっと読む)
貫通穴計測システム及び方法並びに貫通穴計測用プログラム
【課題】 対象部材に形成された貫通穴の位置、方向などを精度よく検出すること。
【解決手段】 所定の厚みを有するワークに形成された貫通穴を撮影して当該貫通穴の内壁面が映るステレオ画像を取得する画像取得装置1Aと、この取得した画像を処理する画像処理装置2と、を備え、この画像処理装置2が、取得したステレオ画像から内壁面部分の特徴点を検出し、当該特徴点の三次元位置情報を検出する位置情報検出手段12,13と、検出した特徴点の三次元位置情報に基づいて貫通穴の形状を予測し、略筒状の三次元形状を算出する形状予測手段14と、位置情報検出手段にて検出した特徴点の分布に基づいて、形状予測手段にて算出された略筒状の三次元形状における端部を特定する端部特定手段15と、を備えた。
(もっと読む)
車両位置特定装置
【課題】 車両の現在位置と、走行車線をより確実に特定する。
【解決手段】 信号機を魚眼レンズで撮像し、抽出した信号機画像から車両に対する仰角と水平角を算出し、これと信号機の位置座標、高さとから車両の現在位置を特定する。更に、車道外側線から信号機までの道路幅方向の距離と車線幅とから、走行車線を特定する。
カメラによる撮像対象として、走行する道路上及び周辺に多数存在する信号機を撮像するようにしているので、頻繁に走行道路上の正確な車両位置を特定することが可能になる。また、常時光りを発している信号機を撮像及び認識の対象としているので、夜間、雨天などの悪環境であっても、確実に信号機の認識、抽出が可能になる。従って、夜間や雨天等であっても、車両位置や走行車線を確実に特定することができる。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
連続変化するオフセットマークと、オーバレイ決定方法
【課題】
【解決手段】本発明は、オーバレイマークと、オーバレイ誤差を決定する方法とに関する。本発明の一態様は、連続的に変化するオフセットマークに関する。連続的に変化するオフセットマークは、位置の関数として変化するオフセットを有する周期構造を重ね合わせた1つのマークである。例えば、周期構造は、ピッチなどの格子特性に関する値が異なる格子に対応してよい。本発明の別の態様は、連続的に変化するオフセットマークからオーバレイ誤差を決定する方法に関する。その方法は、一般に、連続的に変化するオフセットマークの対称中心を決定する工程と、それをマークの幾何学的中心と比較する工程と、を備える。オーバレイがゼロである場合には、対称中心は、マークの幾何学的中心と一致する傾向がある。オーバレイがゼロでない場合(例えば、2つの層間にずれがある場合)には、対称中心は、マークの幾何学的中心からずれる。その位置ずれを、連続的に変化するマークの予め設定されたゲインと組み合わせて用いることで、オーバレイ誤差を算出する。
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。 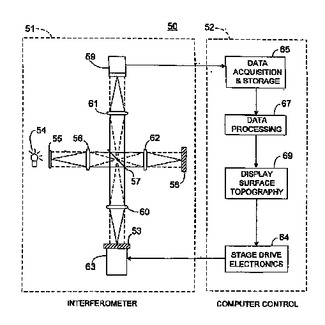 (もっと読む)
(もっと読む)
計測学ツール較正方法および装置
計測学ツール較正方法および装置が開示される。前記装置は、その上に形成された少なくとも一つの較正サイトを備える。前記較正サイトは、基板の表面に配置された少なくとも一つのフィーチャーを有するセルのパターンを含む。前記フィーチャーは、ステップ高さ計測学ツールと位相計測学ツールを較正するために、ステップ高さ計測学ツールと位相計測学ツールによる計測に供される。  (もっと読む)
(もっと読む)
実立体モデル作成装置、立体データ作成装置、疑似立体データ作成装置並びにその方法
【課題】 レーザ光を対象物上にスキャンして三次元形状データを得るには、そのスキャンにかなりの時間がかかりその間対象物が静止している必要があり、人物などの三次元形状データを得るのは、難しいという問題があった。
【解決手段】 データ入力部10において、カメラを用い対象物の複数の画像を得る。この画像に基づいて、モデリング部12において、色彩データを含む三次元形状データを得る。この三次元形状データに基づいて成形部14において実立体モデルを成形する。これは切削や成形型による成形によって行われる。そして、色づけ部16により、色彩データに基づいて、実立体モデルに対し色づけが行われる。
(もっと読む)
841 - 860 / 860
[ Back to top ]