
Fターム[2F065QQ43]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | ヒストグラム作成 (252)
Fターム[2F065QQ43]に分類される特許
161 - 180 / 252
炭素繊維布帛の検査装置および検査方法
【課題】
本発明は、炭素繊維布帛の欠点を簡便、かつ、高精度で、信頼性高く検査できる炭素繊維布帛の検査装置および検査方法を提案すること。
【解決手段】
本発明の炭素繊維布帛の検査装置は、炭素繊維布帛を移動させる送出装置と巻取装置と、それらの間に設置する、少なくとも次の(a)〜(h)の手段を備えることを特徴とする炭素繊維布帛の布帛欠点の位置および種類を検出する検査装置である。
(a)照明手段
(b)画像取得手段
(c)遮光手段
(d)撮像した取得画像を数値化した布帛情報に処理する画像処理手段
(e)炭素繊維布帛形態を数値化した布帛情報を予め基準情報として登録しておく記憶手段
(f)布帛情報と基準情報とを比較して、布帛欠点の在否、および、欠点の位置ならびに種類を判別する判別手段
(g)出力手段
(h)炭素繊維布帛の移動量または前記画像取得手段の移動量を検出する移動量検出手段
(もっと読む)
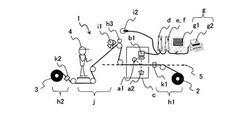
鉄道車両走行車輪測定装置

【課題】距離センサで得られる一群の測定値から設計図において用いるところの車輪中心を含む直線で切断した形状図と同等の形状図を得ることができるようにしたい。
【解決手段】レール11の外側および内側に設置され車両10の車輪100における外側のフランジ面までと内側のバック面までの距離を非接触で測定してその測定結果をそれぞれ出力する距離センサ1a,1bと、両距離センサの測定結果および両距離センサの設置に係る距離のデータから車輪の形状を演算する処理部7を備え、処理部7は、各距離センサで得た測定値毎に、車両の走行方向における車輪の長さ寸法と車輪の軸中心からの距離寸法を得て、両寸法から走行方向における車輪の長さ寸法を車輪の半径方向での長さへ変換することにより設計図において用いるところの車輪中心を含む直線で切断した形状図と同等の形状図を得る。
(もっと読む)
対象物の重心検出方法
【課題】高精度でしかも高速に対象物の重心を求めることが可能な対象物の重心検出方法を提供する。
【解決手段】画素のX方向に沿って画素ラインごとに順次画像データをスキャンし、当該画素ラインでの対象物の画素数とそのラインのY座標位置(y0〜y9)からラインごとにモーメントの総和と対象物の画素数の総和を求めて対象物の重心Y座標を検出する。このX方向スキャン時に、対象物の画素が検出されるごとに、そのX座標位置(x0〜x9)に、最初並びに最後に画素が検出されたラインのY座標を記録し(バッファ41〜44)、その座標値からY方向のラインごとのモーメントの総和と対象物の画素数の総和を求めて重心X座標を検出する。このような構成では、スキャンはX方向にだけ行われるので、重心を求める処理速度が高速になる。
(もっと読む)
半田検査方法
【課題】半田検査において求められた検査結果情報を有効に活用し、印刷検査の有用性を向上させることができる半田検査方法を提供することを目的とする。
【解決手段】基板に印刷された半田の印刷状態の検査を行う半田検査において、検査によって得られた判定結果を基板の各電極について各基板毎に累積記憶し、検査結果情報を参照する際には、累積された判定結果を画面34の半田印刷位置マップ上に、バルーンマーク36の位置および大きさによって、NG発生位置および発生頻度を表示し、さらに必要に応じて印刷方向との関連やNG種類などの詳細情報を表示させる。
(もっと読む)
流水領域検出システム、流水領域検出方法、及びプログラム
【課題】水中にいかなる物体をも設置することなく、河川等を被写体とする映像信号のみから流水領域を検出できるようにする。
【解決手段】固定カメラCMを用いて撮影された流水領域及び非流水領域が含まれる映像を複数フレームにわたって加算するフレーム加算部2と、加算された映像のエッジ成分を強調させる空間フィルタ処理部3と、空間フィルタ処理部3により生成された映像における各画素をエッジ画素か否かに分類する二値化処理部4と、得られる二値画像をもとに流水領域及び非流水領域を判別する領域分割部5Aとを備え、水中にいかなる物体をも設置することなく、河川等を被写体とする映像信号のみから流水領域を検出できるようにする。
(もっと読む)
表面状態の検査方法および表面状態検査装置
【課題】被検査面の全ての箇所について、検査に必要な画像を取得するための撮像を行えるような設定を、簡単かつ高い確度で実行する。
【解決手段】検査対象のワークWをロボット3により位置および姿勢を変更可能に支持しながら、固定されたカメラ1および照明装置2を用いて撮像する。検査に先立ち、ワークWの表面形状を三角平面の集合体として表したCADデータを用いて、被検査面全体の法線方向ヒストグラムを作成し、そのヒストグラムの分布状態に基づき複数の撮像方向を定める。さらに撮像方向毎に1または複数の代表点を定め、代表点毎に視野対応領域を設定し、各視野対応領域において、その領域を定められた方向から撮像したときに検査に適した画像を取得可能な三角平面を抽出する。撮像方向の決定から三角平面の抽出までの処理は、被検査面に対応する全ての三角平面が抽出されるまで繰り返し実行される。
(もっと読む)
画像計測方法、画像計測装置、および画像計測プログラム記憶媒体
【課題】 オプティカルフローパターン、あるいはステレオ画像から平面の三次元幾何情報や点の位置情報などを計測する技術を提供する。
【解決手段】 所定の観察点から空間内を眺めたときの画像にあらわれた、その空間内の任意の点の、2つの時刻における各位置をそれぞれp0,p1、上記点の、無限時間経過後の位置をpinf、上記点を含む平面が観察点に重なる時刻における上記点の位置をpcとしたとき、
上記点の4つの位置pinf,p0,p1,pcで決まる複比{pinfp0p1pc}を用いて、上記平面の方位やその平面が上記観察点に重なる時刻を求める。
(もっと読む)
カラー画像の処理方法およびカラー画像処理装置
【課題】画像上の対象物の明るさに左右されることなく、対象物の抽出精度を確保する。
【解決手段】カラーハイライト照明を用いた基板検査装置において、リード先端部を検査のために抽出するに際し、処理対象のカラー画像を構成するR,G,Bの各色データをそれぞれ所定の係数により重み付けし、重み付け後の各色データの総和Iを濃度とするグレイスケール画像を生成する。ここで各係数のうち、検査対象のリード先端部を抽出するのに適した色データであるR,Gの係数には正の値が設定され、残りのBには負の値が設定される。さらに生成されたグレイスケール画像について、判別分析法によりしきい値を特定した後に、そのしきい値による2値化処理を行って、リード先端部を抽出する。
(もっと読む)
パターン計測方法及びパターン計測装置、並びにパターン工程制御方法
【課題】
いかなるタイプのパターンであっても、その断面形状を順テーパから逆テーパまで、非破壊的に、正確かつ定量的に計測し得るパターン測定技術を提供する。
【解決手段】
走査型顕微鏡の制御系ないし隣接する端末から反射電子ないしは2次電子強度の分布を処理し、エッジ近傍を表わす領域の形状を数値化しそれらの結果からテーパ傾向を算出する。走査型顕微鏡で得られた上空写真の画像データから、パターンエッジ近傍の領域の形状を数値化することによって断面形状のテーパ傾向を評価する。上空観察結果のみから逆テーパ、垂直、順テーパなどのエッジの傾向を評価することが可能になる。
(もっと読む)
平版印刷版材料の故障検出方法
【課題】表面に微小な濃淡が存在する平版印刷版材料の塗布欠陥を迅速に検出する故障検出方法を提供することである。
【解決手段】プラスチック支持体上に少なくとも1層の親水性層及び少なくとも1層の画像形成層を有する平版平版印刷版材料の故障検出方法において、該平版平版印刷版材料を透過で撮影した画像データから、特定濃度以上の部分を抽出し、該当部分の面積及び積算濃度から算出される式から故障部分を抽出することを特徴とする故障検出方法。
(もっと読む)
3次元形状測定方法
【課題】検査対象物がノーマル検査モードではない場合、ベアボード情報を検索し、ベアボード情報がない供給業体で供給されたボードである場合、ベアボード学習を通じてボードのターゲット対象物の3次元形状を測定する方法に関する。
【解決手段】第1照明源の明るさを測定する段階と、位相を高さに変換したファクターを測定する段階と、ノーマル検査モードによるボードの3次元形状を測定する段階と、ベアボード情報がない場合にベアボード学習を実施する段階と、ベアボード情報があるか又はベアボード学習情報が発生されると学習検査モードによるボードのターゲット対象物の3次元形状を測定する段階と、3次元形状情報を用いてボードが正常か否かを分析する段階と、から構成され、ボードのターゲット対象物の3次元形状測定作業をより容易に実施することができる。
(もっと読む)
異物検査方法および装置
【課題】異物のサイズ、形状を特定できるウエハ異物検査技術を提供する。
【解決手段】検査光照射装置20でウエハ1を斜方照明し、暗視野下のウエハ1での検査光21の散乱光31を散乱光検出器34で検出して異物5の座標位置を特定する異物検査装置10に落射照明装置40および撮像装置45を設ける。散乱光検出器34の検出に基づき異物判定装置35で特定された異物5の座標位置を落射照明装置40による明視野照明下で撮像装置45によって撮像し、この撮像に基づいて異物画像を抽出する。抽出した異物画像により異物のサイズ、形状、色、性状を特定する。異物検査装置だけで異物のサイズ、形状、色、性状を特定できるため、異物のレビューを的確かつ迅速しかも安価にて実行できる。
(もっと読む)
クラッド率測定装置、クラッド率測定プログラム及びクラッド率測定方法
【課題】芯材の表面に形成されたクラッド層のクラッド率を客観的かつ定量的に測定するのにより好適なクラッド率測定装置を実現する。
【解決手段】クラッド率測定装置12は、芯材14の表面にクラッド層16を形成した測定対象部材13に関する断面像を取り込む画像取得手段18と、前記断面像の厚み方向におけるピクセル値の変化に基づきクラッド層16の対向する二つの境界を求める境界判定手段20と、前記境界間の距離を演算してクラッド層16のクラッド率を算出するクラッド率演算手段22を備える。
(もっと読む)
ギャップ計測装置、ギャップ計測方法、およびロール状体の製造方法
【課題】凸部が表面に形成されたフィルムを巻いて形成されるロール状体について、隣接するフィルム間のギャップを検査員の主観を排除して計測する。
【解決手段】計測対象2(ロール状体)に照射光を当てる照明光源8と、上記照射光により生成され、計測対象2の端面から出射する出射光により形成される原画像を取得する画像センサ10と、上記原画像において生じる、上記フィルムと、隣接するフィルム同士のギャップとのコントラスト差に基づき、上記ギャップを計測するPC12とを備えている。
(もっと読む)
画像欠陥検査装置、画像欠陥検査システム及び画像欠陥検査方法
【課題】 検査対象を撮像した検査画像と、この検査画像と本来同一であるべき参照画像とを比較して、お互いに異なる部分を欠陥として検出する画像欠陥検査において、検査画像に生じる色ムラにより生じる疑似欠陥を低減する。
【解決手段】 画像欠陥検査装置を、検査対象上の所定の大きさの領域毎にこれら各領域を撮像した画像に含まれる画素の画素値に応じて参照値をそれぞれ決定する参照値決定部21と、この所定の大きさの領域を複数含んで構成されるマクロ領域について、マクロ領域に含まれる上記所定の大きさの領域毎に決定された参照値の分布情報を決定する分布情報決定部22と、を備えて構成し、マクロ領域において算出された分布情報に応じて欠陥検出条件を変えて欠陥検出を行う。
(もっと読む)
顔端検出装置、顔端検出方法、及び、プログラム
【課題】夜間に撮影された顔画像や女性の顔画像等といった顔の両端位置を実際よりも内側に誤検出する虞のある顔画像に基づいて、より正確に顔の両端位置を検出する。
【解決手段】カメラ10でドライバーの顔を夜間に撮影して得られた顔画像や女性のドライバーの顔を撮影して得られた顔画像等を、画像メモリ22に記憶する。CPU24は、この顔画像の画素データに基づいて、顔の左右方向の仮の輪郭位置を検出する。検出した仮の輪郭位置の周辺に位置する画素データに基づいて、輪郭位置の候補となる複数の輪郭候補位置を決定し、決定した複数の輪郭候補位置から統計に基づいて抽出した位置を輪郭位置とする。これにより、夜間に撮影された顔画像や女性の顔画像等に基づいて、より正確に顔の両端位置を検出することが可能となる。
(もっと読む)
位置および指示方向計測システム
【課題】 簡単な構成で撮像装置の受光感度を上昇させ、精度の高い位置および指示方向計測を実現することができる位置および指示方向計測システムを提供する。
【解決手段】 位置および指示方向計測システムは、同心円状の縞模様光11を投射する投射装置12と、投射装置から射出された縞模様光11を撮像する撮像装置13,14と、撮像装置から得られた縞画像に基づいて投射装置12の位置および指示方向を求める演算装置15とを備える。撮像装置13,14は、縞模様光11を集光するための集光レンズ16,17と、集光レンズを介して得られた縞模様光を縞画像に変換する画像センサ18,19とを有する。画像センサの受光面は集光レンズの合焦位置を除く位置に配置される。
(もっと読む)
追跡対象物速度検出装置および追跡対象物速度検出方法
【課題】レーダやレーザ光ビーム等の大掛かりな装置や、複雑で演算量の多い演算も必要とせずに、移動体の移動速度や移動距離を簡単な構成で高精度に測定する方法および測定装置を提供すること。
【解決手段】ステレオカメラシステムを用いて距離情報を取得し、動画の撮像データ中の追跡対象物である移動体の色情報と距離情報を併用することで、レーダやレーザ光ビーム等の大掛かりな装置や、複雑で演算量の多い演算も必要とせずに、追跡対象物である移動体の移動速度や移動距離を、簡単な構成で高精度に検出する検出装置および検出方法を提供することができる。
(もっと読む)
端部位置検出方法及び端部位置検出装置
【課題】対象物の材質や透明度が変化した場合であっても、端部位置が検出可能な端部位置検出方法及び端部位置検出装置の提供である。
【解決手段】移動するシート状の対象物の端部に、投光部から検出光を照射し、該対象物を介して対向して配置した受光部により検出光を受光し、受光した検出光のコントラストにより前記対象物の端部位置を検出する端部位置検出方法であって、前記投光部からの検出光の光量を前記対象物の移動方向に沿って徐々に変化させ、該移動方向に沿って複数の測定領域で前記受光部により検出光を受光し、最も高いコントラストが得られる測定領域での受光データをもとに前記対象物の端部位置を検出する端部位置検出方法である。
(もっと読む)
顔中心位置検出装置、顔中心位置検出方法、及び、プログラム
【課題】人物画像に基づいて、その人物が眼鏡を着用し、横の方向を向いている場合においても、正確に顔中心位置を検出する。
【解決手段】カメラ10でドライバーの顔を撮影して得られた顔画像を画像メモリ22に記憶する。CPU24は、画像メモリ22に記憶された前記顔画像に基づいて、顔の両側位置と上下位置を判別する。さらに、CPU24は、ドライバーが眼鏡を着用し、横方向を向いているか否かを判別し、眼鏡を着用し、横方向を向いていると判別した場合に、顔下部領域の顔画像を用いて、顔中心位置を検出する。これにより、眼鏡を着用したドライバーが、横方向を向いていた場合でも、正確に顔中心位置を検出することが可能となる。
(もっと読む)
161 - 180 / 252
[ Back to top ]