
Fターム[2F065RR07]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 実物 (289)
Fターム[2F065RR07]に分類される特許
61 - 80 / 289
膜の赤外吸収スペクトル測定方法
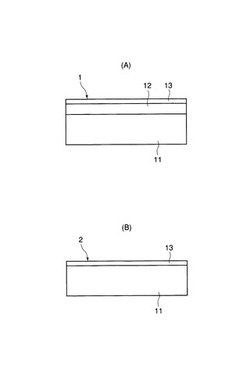
【課題】 被測定膜を形成するための基板がホウケイ酸ガラス基板等のように赤外光の吸収が大きい基板であっても、被測定膜の実用的な赤外吸収スペクトルを得ることができるようにする。
【解決手段】 第1の試料1の基板11上に形成された被測定膜12および赤外光を半透過するITO膜13に赤外光を照射し、それによって反射された赤外光を検出し、この検出結果から第1の赤外吸収スペクトルを得る。また、第2の試料2の基板11上に形成されたITO膜13に赤外光を照射し、それによって反射された赤外光を検出し、この検出結果から第2の赤外吸収スペクトルを得る。そして、第1の赤外吸収スペクトルから第2の赤外吸収スペクトルを差し引くと、第1の試料1の被測定膜12の正味の赤外吸収スペクトルが得られる。
(もっと読む)
形状測定装置

【課題】被測定物の振動の影響を受けず,また,干渉光の乱れや揺らぎを生じさせることなく,被測定物の厚みを簡易に高精度で測定できること。
【解決手段】電流変調電源10により,半導体レーザ2に対する注入電流を一定周期で所定の電流値範囲において線形変化(ノコギリ状に変化)させ,その半導体レーザ2から出射される測定光を分岐させた測定光P1,P2を被測定物1の表裏相対する測定部位1a,1bへ導き,表裏の干渉計a20,b20各々によって各測定光P1,P2を測定部位1a,1bに照射する物体光及び参照板に照射する参照光に分岐して干渉させ,各干渉計a20,b20のビート信号の位相差を検出し,その検出信号を被測定物1の厚みに相当する測定値として出力する。
(もっと読む)
測定装置、情報媒体製造装置、測定方法および情報媒体製造方法
【課題】テープ体の縁部についての形状の特性を示す特性データを正確に測定する。
【解決手段】移動機構2と、移動機構2によって移動させられている磁気テープ200の長さ方向における互いに異なる照射位置に向けて磁気テープ200の一面201側から検査光Lを照射する発光部31および磁気テープ200の他面202側に配置されて検査光Lを受光する受光部32をそれぞれ有して受光した検査光Lに基づいて磁気テープ200の縁部の幅方向に沿った変位量をそれぞれ検出する二組のセンサ3a,3bと、磁気テープ200を各照射位置において支持する支持板18と、測定部とを備え、測定部は、各光学式センサ3a,3bによってそれぞれ検出された両変位量の差分量を求め、差分量に基づいて磁気テープ200の縁部についての形状の特性を示す特性データを測定する。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】カメラの取得画像に基づいて撮影画像に含まれる特徴点の三次元位置を算出する構成を実現する。
【解決手段】カメラの取得画像に基づいて正規分布に従った存在確率分布を持つカメラ位置姿勢情報を生成し、さらに、カメラの取得画像に基づいて正規分布に従った特徴点追跡誤差分布を生成し、これらの正規分布に従った存在確率分布を持つカメラ位置姿勢情報と、正規分布に従った特徴点追跡誤差分布情報を適用して特徴点の三次元空間における存在確率分布を算出する。本構成によりカメラの取得画像に含まれる特徴点の三次元位置をより正確に解析すること可能となる。
(もっと読む)
現場作業支援システム
【課題】拡張現実感技術を利用する現場作業支援システムにおけるトラッキング誤差により作業者に誤った情報を提供するのを防止する。
【解決手段】作業現場に設置されたラインマーカ5を撮影した撮影画像から画像認識によって得たコードマーク画像位置と該ラインマーカ5の実際の寸法から計算で求められるコードマーク画像位置との誤差を参照してトラッキング誤差の大きさを推定し、トラッキング誤差の大きさによって作業者に提供する情報を制御する。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】2値化ラインセンサ画像の途中でトロリ線がなくなると画像を上下に横断していないのでトロリ線として認識せず背景のノイズとして処理してしまう問題を解決する。
【解決手段】ラインセンサ画像をMライン毎に区切って連続する番号を付したn番目のラインセンサ画像に対して、(n−1)番目のラインセンサ画像におけるMラインのうちのNライン(M≧N)であってn番目のラインセンサ画像に時系列的に連続する予備ライン画像及び(n+1)番目のラインセンサ画像におけるMラインのうちのNラインであってn番目のラインセンサ画像に時系列的に連続する予備ライン画像を連結して(M+2N)ラインよりなるラインセンサ画像を作成するので、画像の途中でなくなるトロリ線を背景のノイズとして処理することがなくなる。
(もっと読む)
ドリル検査装置、ドリル検査方法、およびそのプログラム
【課題】ドリルの研磨や破棄のタイミングをバラツキなく判断することは難しい。
【解決手段】撮像部20は、ドリルの刃先を回転軸に沿う方向に撮像する。測定部34は、撮像部20により撮像された画像内の刃先領域の形状情報を測定する。記憶部36は、ドリルのライフサイクル上の研磨回数を反映させたステージごとに、そのドリルの刃先領域の形状情報の参照データを保持する。判定部38は、測定部34により測定された形状情報から、ドリルの刃先の状態を判定する。たとえば、測定部34により測定された形状情報と、記憶部36に保持されたステージごとの参照データを照合することにより、検査対象のドリルが該当するステージを特定する。
(もっと読む)
超精密形状測定方法及びその装置
【課題】 放射光施設で用いられる硬X線から軟X線を集光させるため長尺の曲面ミラーを、ナノ若しくはサブナノオーダーの精度で超精密に測定することができ、特に一方向に長い領域における楕円形状や円筒形状のX線ミラーの全体形状を測定できる超精密形状測定方法及びその装置を提供する。
【解決手段】 フィゾー型干渉計で、その参照面の直径よりも長い被測定物の被測定面全体の部分形状データと、隣接する部分形状データ間の相対角度を取得した後、各部分形状データを相対角度と重合領域の一致度を利用してスティッチング処理を施して全体形状を測定すべく、被測定物1と基準平面ミラー3とをフィゾー型干渉計の参照面2に対して略平行に並べるとともに、被測定物を主傾斜ステージ上にXステージを介して保持し、基準平面ミラーを主傾斜ステージ上に設けた副傾斜ステージ上に保持した配置とした。
(もっと読む)
計測装置
【課題】被検物の表面に溝や段差があっても計測が可能な計測装置を提供すること。
【解決手段】被検物(被検物50)にパターン光を投影するパターン投影部(液晶素子41、投影レンズ42、バックライト44)と、前記パターン光の一部を変調させるパターン変調部(パターン発生回路20中の点滅データ発生回路22)と、前記被検物に投影された前記パターン光の投影像(投影パターン60)を撮影するパターン撮影部(撮影カメラ43)と、前記投影像から前記パターン変調部によって変調された領域(点滅部分60c)を検出する変調領域検出部(パターン処理回路30中の点滅部検出回路31)と、前記変調領域検出部によって検出された変調領域の情報に基づいて前記被検物の形状を計測する形状計測部(パターン処理回路30中の断面形状計測回路32)と、を備える。
(もっと読む)
複数のカメラを用いた撮像方法および計測装置
【課題】複数のカメラを用いて複数の計測点を撮像する場合に、撮像に要する時間を短縮する。
【解決手段】計測対象である基板2の傾き角度θに基づいて、各カメラ9B,9Cに対応する各計測点2a−2,2a−3のずれ量を算出し、このずれ量とカメラ9B,9Cの視野サイズに基づいて、3台のカメラ9A,9B,9Cの内、カメラの視野内に各計測点2a−1,2a−2,2a−3が収まって同時に撮像可能なカメラを判定し、同時に撮像可能と判定されたカメラによって、各計測点を同時に撮像するようにしている。
(もっと読む)
位置姿勢推定方法
【課題】模型の位置および姿勢の検出精度を向上させること。
【解決手段】磁力によって空中に浮揚させられている模型の、X、Y、Z座標値で定義される模型の位置、およびX軸周りのロール角度、Y軸周りのピッチ角度、Z軸周りのヨー角度で定義される模型の姿勢を推定するために、模型に記された位置姿勢検出用の第1のマークをZ軸方向から観察する第1の観察装置と、模型に記された位置姿勢検出用の第2のマークをY軸方向から観察する第2の観察装置とを設け、第1の観察装置および第2の観察装置によって取得された第1のマークおよび第2のマークの検出データを用いて模型のX,Y,Z座標値の変位量およびピッチ角度およびヨー角度を推定する第1の過程と、第1の過程にて推定された模型のX,Y,Z座標値の変位量およびピッチ角度およびヨー角度と、予め登録されているロール角度補正式とを用いて、模型のロール角度を推定する第2の過程とを具備する。
(もっと読む)
画像処理装置、画像処理プログラム、及び撮像装置
【課題】表示パネルの点・線欠陥を検出する場合に、回路規模の増大を回避し、利用効率の低下及び処理速度の低下を抑制し得る画像処理装置を提供する。
【解決手段】画像メモリ12の表示パネル画像データから水平1ライン分の画像データを読み込むアドレスを、垂直方向cn毎となるように設定する垂直メモリアドレス制御回路(入力用)23aと、水平1ラインの((h−1)×cm+1)の各画素データを連続して格納するh個のラインバッファメモリ24を1組として、v組設けたラインバッファメモリユニットと、水平ラインの各画素データを画像メモリ12から複数ライン分をライン毎に順に読み込み、ラインバッファメモリ24に格納する画像メモリ制御回路21と、ラインバッファメモリ24から出力された比較演算対象画素データを用いて画素間比較演算を行う比較演算処理回路25と、演算結果を格納する画像メモリ12とを備える。
(もっと読む)
三次元形状測定器及び試料画像構築装置
【課題】微細な試料の表面各部の高さ情報から当該表面の画像を得るための新たな手法を提供する。
【解決手段】三次元形状測定器により取得された試料の表面各部の高さを示す高さ情報が高さ画像記憶部201で記憶される。画像−擬似輝度画像変換部207は、まず、当該試料の表面各部の高さ情報に基づいて当該表面各部の傾きを示す傾き情報を算出する。そして、この表面各部の傾きを当該試料表面の画像における当該表面各部の輝度に対応付けて当該画像における輝度情報を生成し、この輝度情報を用いて当該試料表面の輝度画像を構築する。
(もっと読む)
露光装置およびデバイス製造方法
【課題】例えば、原版のパターン面の変形によるデフォーカスを低減させる露光装置を提供する。
【解決手段】
原版からの光を投影する投影光学系を有し、該原版のパターン面と前記投影光学系とを介して基板を露光する露光装置であって、前記投影光学系の光軸方向における該パターン面の複数箇所の位置をそれぞれ検出する検出手段と、該パターン面に直交する方向において該原版に力を加える手段と、を有し、前記検出手段により検出された該パターン面の複数箇所の位置が予め定められた許容範囲内になるように、前記力を加える手段に力を発生させることを特徴とする。
(もっと読む)
ステレオ3次元計測システム
【課題】静止物体を低価格で簡易に且つ高精度にステレオ3次元計測できるようにした、インタラクティブなステレオ3次元計測システムを提供する。
【解決手段】ステレオ画像間の対応位置を探索することにより、静止物体である計測対象の3次元計測を行うステレオ3次元計測システムであって、撮像装置と、空間的にも時間的にも変化するアクティブ照明を発生させるアクティブ照明手段と、3次元計測処理装置と、表示装置とを備え、アクティブ照明で計測対象を照らしつつ、撮像装置を用いて時系列のステレオ画像を撮影し、撮影されたステレオ画像は、3次元計測処理装置に入力され、3次元計測処理装置では、時間方向に複数のフレームを使ってステレオ画像間の対応位置を探索することにより、計測対象までの距離を計測し、計測して得られた計測結果を表示装置に表示させ、更に、最新のステレオ画像を用いて逐次的に計測処理を行い、実時間に計測結果を表示装置に表示させる。
(もっと読む)
ステレオビジョンプローブシステムの包括的校正方法
【課題】フレーム歪み誤差と並んでプローブ形状誤差をも校正できるステレオビジョンプローブシステムの包括的校正方法を提供する。
【解決手段】ステレオビジョンプローブシステム120は、タッチプローブ140に形成されたマーカパターン150を複数のカメラ130A,130Bで撮影し、三角法演算を行ってタッチプローブ座標位置を測定する。包括的校正システム100において、フレーム歪み校正は、可搬式の校正治具160にタッチプローブ140を設置して三角法演算を行う反復工程を含むが、タッチプローブ140のプローブ形状歪み誤差に影響されない。プローブ形状歪み校正にはフレーム歪み校正の結果が適用される。同一のプローブチップが包括的校正ルーチンの全体を通じて用いられる場合、プローブチップ校正はフレーム歪み校正により用いられる画像セットからの画像を用いる。
(もっと読む)
計測装置
【課題】フェムト秒レーザー光を使用してもそのメリットを生かすことが出来て、高精度の計測が可能な、計測装置を提供すること。
【解決手段】被検物Tに照射する測定光と該被検物で反射する戻り光とに基づいて被検物の形状を測定する計測装置であって、測定光を被検物へ照射させ且つ測定光と同じ光路を通って戻る戻り光を反射させる回転可能な反射面(MEMSミラー231)を備えた第1偏向部(偏向素子23)と、測定光と所定の関係を有し、第1偏向部で反射したモニター光を測定光とは異なる方向に向ける第2偏向部(ミラーアレイ25)と、第2偏向部からのモニター光を受光して該モニター光の位置を検出するモニター光検出部(位置センサー26)と、を備えてなる。
(もっと読む)
収差測定方法
【課題】干渉縞に高周波成分が重畳されてしまう光学素子についてツェルニケ展開を行ったときにも、得られる多項式の直交性を保つことのできる収差測定方法を提供する
【解決手段】被検光学素子の波面収差の空間分布を、所定項数よりも少ない項数でツェルニケ展開して、低次の波面収差を得る低次波面収差算出工程と、低次波面収差算出工程において近似できなかった残差成分を、被検光学素子の波面収差の空間分布として算出する残差成分空間分布算出工程と、残差成分空間分布算出工程において算出された波面収差の空間分布を、所定項数でツェルニケ展開して、波面収差を得る高次波面収差算出工程と、高次波面収差算出工程において得られた波面収差のうち、所定項数よりも少ない項数について、低次波面収差算出工程において得られた波面収差を適用して、被検光学素子の波面収差を得る低次波面収差適用工程と、を備える。
(もっと読む)
計測装置及びミラー姿勢・回動監視装置
【課題】被検物の表面の高精度の計測が可能な、計測装置などを提供すること。
【解決手段】被検物に照射する光源からの測定光と該被検物で反射する戻り光とに基づいて前記被検物の形状を測定する計測装置であって、回動軸を中心に回動可能な反射面を有し、該反射面により前記測定光を前記被検物へ反射させ且つ前記被検物で反射して戻る前記戻り光を前記測定光の光路上に導く偏向部と、前記測定光とは異なる方向へ反射するように前記反射面へ投光されるモニター光を投射するモニター光投射部と、前記反射面で反射した前記モニター光を前記回動軸に対応する方向に沿って集光する集光部と、前記集光した前記モニター光の前記回動軸に対応する方向の位置を検出し前記回動軸の傾きを検出する傾斜検出部と、を備えてなる。
(もっと読む)
エッジ検出によるモデルマッチングを用いたカメラ校正方法
【課題】乱雑な背景で基準点の指定が実際の位置とずれていてもカメラ校正が可能となるエッジ検出によるモデルマッチングを用いたカメラ校正方法を提供する。
【解決手段】形状と大きさが既知で直交する3辺を備えた対象物11をステレオカメラ12、13で撮影して入力画像を得る第1工程と、入力画像の平滑化処理を行なって解析対象画像を得る第2工程と、解析対象画像内のエッジを検出する第3工程と、3辺で構成される三次元座標系の原点と各座標軸上の点にそれぞれ対応する4基準点位置を入力画像内に指定する第4工程と、各基準点位置から決まる座標軸モデルと解析対象画像内の3辺が一致するようにモデルマッチングを行なって修正基準点位置を求める第5工程と、各修正基準点位置を用いて対象物モデルを作成し解析対象画像内の対象物11と一致するようにモデルマッチングを行なって最適な透視投影行列を決定する第6工程とを有し、最適な透視投影行列を用いてカメラ校正を行なう。
(もっと読む)
61 - 80 / 289
[ Back to top ]