
Fターム[2F065RR07]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 実物 (289)
Fターム[2F065RR07]に分類される特許
21 - 40 / 289
ナノインプリント成型積層体の検査方法
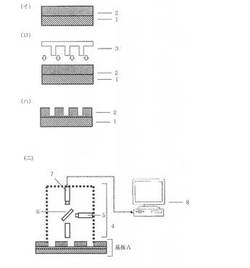
【課題】ナノインプリント成型積層体の欠陥検査や膜厚測定を簡便かつ迅速に、非破壊で行うことが可能な検査方法を提供すること。
【解決手段】本発明の検査方法は、鋳型モールドを用いるナノインプリント法により成型されたレジスト材料からなる膜層を有する基板に対して、レジスト材料を発光させる励起波長の光を照射し、基板上の成型されたレジスト材料からなる膜層からの発光を発光パターン画像として取得する工程(1)と、該発光パターン画像を、成型に用いた鋳型モールドのパターン画像又は同一鋳型モールドで繰り返し成型した該発光パターン画像と異なる発光パターン画像と比較し、画像の相違点を欠陥として検出する欠陥検出工程(2)及び/又は、該発光パターン画像を発光強度により解析し、発光強度の値から膜厚を測定する膜厚測定工程(3)とを含み、半導体、配線基板、電子デバイス、光学デバイス等の製造における品質管理に有用である。
(もっと読む)
形状測定装置,形状測定方法

【課題】干渉計における位相シフトを複数の偏光板を用いて光学的に行う場合に生じる位相シフトの誤差の影響を受けない形状測定の結果を簡易に得る。
【解決手段】装置校正用工程において,物体光及び参照光の光路長を一定にし,物体光及び参照光各々を遮断したときの4つの光検出器の検出強度が一致するよう干渉光抽出用の4つの偏光板の保持角度を調節し(S12),その後,物体光又は参照光の光路長に変動を与えつつ,4つの干渉光の強度の時系列変化の振幅が一致するよう光強度の線形補正のゲインを設定する(S13)とともに,4つの干渉光それぞれの強度の時系列変化から得られるリサージュ波形に基づいて,3つの非基準の干渉光の位相シフトの誤差を算出し(S14),被測定物について得られた干渉光の強度及び前記位相シフトの誤差とに基づいて,前記被測定物についての物体光と参照光との位相差を算出する(S17)。
(もっと読む)
位置計測システム、位置計測用演算装置およびプログラム
【課題】 作用部を有する領域が回転したり隠れたりした場合でも別領域に配置した基本標識を用いて作用部の3次元位置を求めることができる位置計測システム、位置計測用演算装置およびプログラムを提供する。
【解決手段】 位置計測システムは、前腕2に取り付けられる位置関係の分かっている3つ以上の基本標識を有する標識セット5と、標識セット5を撮像する2次元撮像素子を有する撮像装置6と、標識セット5に対する作用部10の座標を記録する記録装置7と、撮像装置6で撮像した標識セット5の画像に基づいて求めた標識セット5の位置および角度と記録装置7に記録された標識セット5に対する作用部10の座標とを用いて作用部10の3次元位置を演算する演算装置8とを備える。
(もっと読む)
物体測定装置及び物体測定プログラム
【課題】ユーザが任意の2点を指定する操作を行うことなく、実物の測定器具を用いて測定した場合と同様の測定値を算出することができるようにする。
【解決手段】操作デバイス14が仮想ノギスBに対する移動操作を受け付けて、移動処理部15が仮想ノギスBが形成する測定空間ms内に測定対象物Aが含まれる位置まで、その仮想ノギスBのジョウB1,B2を移動すると、座標系設定部16が測定空間msにローカル座標系を設定し、測定値算出部17がローカル座標系のv方向において、点群データの最大値と最小値を検出し、その最大値と最小値の差分値を測定対象物Aの測定値として算出する。
(もっと読む)
レーザ溶接品質評価方法及び装置
【課題】レーザ光入射角が異なっても適確な溶接品質の評価が可能なレーザ溶接品質評価方法及び装置を提供する。
【解決手段】入射角が可変のレーザ光Aを被溶接物Wに照射して行ったレーザ溶接の品質評価において、レーザ光照射位置及びその周辺のレーザ反射光Bの分布情報を取得する反射光分布情報取得回路10と、被溶接物Wに対する入射角情報を取得する入射角情報取得回路11と、反射光分布情報取得回路10からのレーザ反射光分布情報を入射角情報取得回路11からの入射角情報に対応付けて解析した結果と予め取得しておいた入射角情報毎のレーザ反射光分布情報の解析結果群とに基づいて溶接品質を判定する溶接品質判定回路13とを設ける。レーザ光入射角に応じてレーザ反射光分布情報を解析し、変化する溶融金属及びキーホールの形成状態(溶接品質)をレーザ入射角毎に評価可能とした。
(もっと読む)
物体認識方法、物体認識装置、自律移動ロボット
短時間で良好な物体認識を行う。本発明に係る物体認識方法は、予め作成した物体モデルを用いて、観測場面に含まれる対象物体を認識する物体認識方法であって、観測場面の距離画像を生成し、距離画像から注目点を検出し、注目点を含む領域の特徴量である第1の特徴量を抽出するし、第1の特徴量と、物体モデルの距離画像の領域の特徴量である第2の特徴量と、のマッチング処理を行い、マッチング処理結果に基づいて、観測場面の座標系に第2の特徴量を射影するための変換行列を計算し、変換行列に基づいて、物体モデルに対して対象物体を認識する。  (もっと読む)
(もっと読む)
寸法検査装置及び該装置に用いる被撮像部品
【課題】計測したい点に高精度にターゲットを設け、ソフトウェアでターゲット位置を自動指定できるようにして、寸法検査実施部品の寸法検査を自動で行うと共に、ターゲットの貼り付け誤差や寸法測定の人によるバラツキに起因する誤差、データの改ざんなどが起こらないようにした、寸法検査装置及び該装置に用いる被撮像部品を提供すること。
【解決手段】寸法検査実施部品における少なくとも2次元座標位置が既知で、且つ、位置決め可能な複数の部位に、予め撮像(目視)可能な位置にターゲットを有した被撮像部品を止設して複数の画像を撮像し、該画像データから前記位置決め可能な部位の座標を算出して前記既知の座標位置と比較し、前記寸法検査実施部品の合否判定を実施するソフトウェアを有したデータ処理装置を用い、前記寸法検査実施部品の位置決め可能な部位に止設する被撮像部品を、前記止設により前記ターゲット中心が前記既知の座標位置と対応した位置となる部材とした。
(もっと読む)
繊維配向強度の較正方法
【課題】 紙の表裏の繊維配向性をほぼ同時に繊維配向測定装置により測定する場合に、それぞれの繊維配向測定装置毎に繊維配向強度の誤差が異なることに鑑みて、繊維配向測定装置による測定データを較正する繊維配向強度の較正方法を提供する。
【解決手段】 それぞれが異なる繊維配向強度を有する複数の標準試料11a〜11eについて、較正対象となる繊維配向測定装置で繊維配向強度を測定し、標準試料11a〜11eの繊維配向強度と測定された繊維配向強度との関係から、当該繊維配向測定装置により測定される繊維配向強度を較正する。
(もっと読む)
周辺空間を光学的に走査および測定する方法
本発明は、レーザスキャナ10を用いて周辺空間を光学的に走査および測定する方法であって、レーザスキャナ10が、ある中心Cを有する走査を行うために、目標Tを含むその周りを光学的に走査および測定し、それによって、異なる中心を有するが同じ周辺空間を走査する2つの隣接する走査が測定点Xの範囲内で重複し、したがっていくつかの目標が2つの走査のいずれかによって走査され、それによって、第1のステップ中に、2つの隣接する走査を位置合わせするために、測定点内で目標の場所が特定され、第2のステップ中に、2つの隣接する走査の場所を特定された目標の間で対応関係候補が探され、第3のステップ中に、2つの隣接する走査の仮の位置合わせが行われ、重複する範囲内に測定点の十分な適合度がある場合、仮の的位置合わせが正規の位置合わせに置き換わり、したがって目標を特定する方法が提供される。  (もっと読む)
(もっと読む)
計測システム
【課題】1台の計測装置で複数の計測対象を計測可能とし、かつ、計測対象の絶対位置を精度良く計測することを可能とする。
【解決手段】 この計測システムは、計測対象38までの距離と方向を計測する計測装置34と、計測装置が取付けられているロボット装置(20,32)と、計測対象の近傍に設置されている絶対位置が既知の参照計測対象36と、計測装置34とロボット装置(20,32)を制御すると共に、計測結果から計測対象38の絶対位置を演算する制御装置12を備えている。制御装置12は、参照計測対象36までの距離と方向を計測するキャリブレーション工程と、計測対象38までの距離と方向を計測する計測工程と、を実施する。
(もっと読む)
パンタグラフ高さ測定装置及びそのキャリブレーション方法
【課題】パンタグラフの高さ測定におけるキャリブレーションを簡易に行うことを可能としたパンタグラフ高さ測定装置及びそのキャリブレーション方法を提供する。
【解決手段】車両10の屋根上に設置されるラインセンサ20によって撮影した画像を処理用コンピュータ30で解析して走行中の車両10のパンタグラフ10aの高さを測定するパンタグラフ高さ測定装置において、パンタグラフ10aの端面にマーカ40を設け、ラインセンサ20が複数段階で高さを変更されるパンタグラフ10aのそれぞれの高さ毎にマーカ40を撮影し、処理用コンピュータ30が、ラインセンサ20によって撮影した画像から得られるマーカ40の画像上の位置とマーカ40の実際の高さとの関係式を求めるように構成した。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、三次元形状計測プログラム
【課題】被測定物の材質が、例えば、透明な樹脂などであるときは、被測定部に照射された光が被測定物の内部で散乱してしまうため、ストライプがぼけてしまうことがある。そのため、カメラによって撮像された画像において、ストライプとして識別できない場合がある。
【解決手段】第2のストライプを、第1の隣接距離以下の移動距離で移動させる第2のストライプ移動制御部と、マスターとなる三次元形状物の画像の座標、移動距離から算出された位置、長さが記憶されたテーブルを参照し、第2のストライプが照射された被測定部の画像の座標から被測定部の長さを検出する第2の長さ検出部と、を備え、ストライプ選択制御部は、第1のストライプが照射された被測定部の画像において、ストライプとして識別されたときは、第1のストライプを選択制御し、ストライプとして識別されなかったときは、第2のストライプを選択制御する。
(もっと読む)
液滴の観測方法および観測装置
【課題】ノズルから吐出された液滴を、より実機に近い状態で観測できる観測システムを提供する。
【解決手段】ノズルから吐出された液滴3の画像をインターバルTiをおいて断続的に取得する取得部23と、時間的に前後に得られた第1の画像φ31と第2の画像φ32の間で、それらに含まれる液滴3の同一性を判断する認識部24とを有する測定ユニット10を提供する。画像毎に含まれている液滴3の同一性を判断することにより、速度の測定の最初の画像に含まれた液滴と、最後の画像に含まれた液滴とが同一であることを保証できるので、飛翔方向が予測できないような液滴でも自動的に観察でき、速度や飛翔方向を測定できる。
(もっと読む)
測定装置
【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
2次元画像上で3次元計測を行なう方法及び装置
【課題】取得画像及びCADデータをリンクして、拡散補償により検査の正確性を向上させ、欠陥タイプを特徴つける検査システムを提供する。
【解決手段】3次元距離を決定する装置は、その物体の2次元ピクセル実画像を取得し(102)、3次元CADモデルを用いてその物体の模擬画像を生成し(104)、模擬画像と2次元ピクセル実画像とを比較して特定費用関数を決定し、特定費用関数が所定値以下になるまでその模擬画像を変更する。CADモデルと2次元ピクセル画像との間の相対位置の相互調整に従って、その模擬画像を再配置し(110)、再配置された模擬画像を用いて3次元距離スケールマトリクスを生成し(112)、物体のピクセル画像上の2次元距離と3次元距離スケールマトリクスとを用いて実画像の表面上にある選択されたピクセル間の距離を測定し、表示する。
(もっと読む)
合焦点方式、基板エッジの座標測定方法及び測定用マークの距離測定方法
【課題】鮮鋭度が極大値となる対象が複数あっても、測定対象の合焦点位置を他と誤認せずに得る合焦点方式、基板エッジの座標測定方法及び測定用マークの距離測定方法を提供する。
【解決手段】鮮鋭度の各極大値と、予め得らた測定対象の極大値とを対比し、得らた測定対象の極大値と合致した各極大値中の極大値の位置を合焦点位置とする。閾値を超えた鮮鋭度の検出数が予測数に満たない場合、閾値を任意のステップで下げ、或いは、最小閾値まで閾値を下げる。対象が基板エッジ2と面取りコーナー1であり、高い極大値No2の位置を基板エッジの合焦点位置とする。上記合焦点方式を用いた基板エッジの座標測定方法及び測定用マークの距離測定方法。
(もっと読む)
光学式表面検査装置
【課題】
光学的な表面を有する基板の検査方法において、特に、原器あるいはマスターから複製される基板の適切な表面検査方法が開発されていないため、高密度化する記録媒体や光学素子の量産化が遅れている。
【解決手段】
原器あるいはマスターとそれから複製される基板とをそれぞれ反射ミラーとするような構成のマイケルソン型干渉計あるいは、マッハツェンダー型干渉計を構築することにより、原器あるいはマスターから反射する位相情報を含む光と、検査対象から反射する光とが干渉し干渉縞を観測する。干渉縞を解析することにより、原器あるいはマスターの表面が有する特定の光学的構造と、検査対象の表面構造との差異を観測することができ、検査対象の表面状態を検知することが可能となる。
(もっと読む)
歯車形軸継手の使用限界判定方法
【課題】歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行う
【解決手段】 内歯車5を有する外筒6と、外歯車4を有する内筒3とを備える歯車形軸継手に外筒6に連動して回転する第1反射体11、および、内筒3に連動して回転する第2反射体10を設置し、駆動側軸1bの回転数と同調して発光させた光を第1反射体11および第2反射体10に照射し、反射光から把握される第1反射体11および第2反射体10の相対的な位置関係により歯車の摩耗量を検知し、歯車形軸継手の使用限界を判定する。
(もっと読む)
超精密形状測定方法
【課題】被測定物表面における有限数の離散した計測点の座標と法線ベクトルの実測値を用いて、フーリエ級数展開によって表された近似曲面が、各計測点での誤差が最小になるように次数と係数を最適化する新規な形状導出アルゴリズムによって被測定物表面の全体形状を超精密に測定する超精密形状測定方法を提供する。
【解決手段】導出形状のフーリエ級数形式形状関数とその微分形のスロープ関数と、理想形状関数を用いて算出した理想データを用い、最小二乗法により形状残差とスロープ残差が最小になる条件でフーリエ係数を決定し、形状残差とスロープ残差が共に要求精度よりも小さくなる次数nを見出す工程と、次数nのスロープ関数と、計測座標データと計測法線ベクトルから算出した計測スロープデータを用い、最小二乗法によりスロープ残差が最小になる条件でフーリエ係数を決定する工程とを含む。
(もっと読む)
画像処理方法
【課題】立体画像のデータ量を削減出来る画像処理方法を提供すること。
【解決手段】二次元画像において、視点からの距離が既知である基準点につき、法線方向を求めるステップS11と、前記二次元画像において、視点からの距離が未知である非基準点につき、前記基準点を基準にした照度差に基づいて、視点からの距離及び法線方向を求めるステップS12とを具備し、前記二次元画像と、前記基準点における前記距離及び法線方向、並びに前記非基準点における前記距離及び法線方向とにより、該二次元画像の立体画像情報が表現される。
(もっと読む)
21 - 40 / 289
[ Back to top ]