
Fターム[2F069EE21]の内容
測定手段を特定しない測長装置 (16,435) | 補正;補償 (408) | 手段 (176)
Fターム[2F069EE21]の下位に属するFターム
Fターム[2F069EE21]に分類される特許
1 - 8 / 8
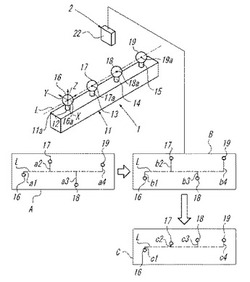
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
複数の姿勢においてプローブを用いて物体をプロービングすることによってプローブを物体とレジストレーションする方法およびシステム

【課題】複数の姿勢においてプローブを用いて物体をプロービングすることによって、プローブが物体とレジストレーションされる方法を提供する。
【解決手段】プローブ110の各姿勢は、ロケーションおよび向きを含む。プローブ110の現在のロケーションの確率分布が、粒子のセットによって表され201、プローブ110の現在の向きの確率分布が、各粒子について、現在のロケーションを条件とするガウス分布によって表される。候補動作のセットが選ばれ215、各候補動作について、粒子のセットに基づく期待不確実性が求められる220。最小の期待不確実性を有する候補動作が、プローブ110の次の動作として選択され230、プローブ110は、次の動作に従って移動され202、粒子のセットは、プローブ110の次の姿勢を用いて更新される210。
(もっと読む)
自動二輪車の緩衝器ストローク検出装置
【課題】簡素でコンパクトな構造で緩衝器のストローク量を精度良く検出させる。
【解決手段】伸縮自在に嵌合したインナーチューブ6及びアウターチューブ5と、これらチューブの内部に配設された油圧緩衝用の作動油11と、伸縮によって容積を変化させる空気室2とを備えた自動二輪車の緩衝器1において、空気室2内に配設されて空気室内の空気圧を検出する圧力検出手段3と、圧力検出手段の検出値から緩衝器のストローク量を換算するストローク量演算手段20とを少なくとも備えたストローク検出装置34を採用する。緩衝器1の所定のストローク位置を検出して補正用の実ストローク量S2を計測するストローク位置検出手段14,15を備える。空気室2内に配設されて空気室内の空気温度を検出する温度検出手段4を備え、圧力検出手段3と温度検出手段4との検出値から緩衝器1のストローク量S1を換算する。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システム
【課題】エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システムを提供する。
【解決手段】リニア・エンコーダ23は、移動式往復台25の側面に設置した一対の側面リニア・エンコーダ23−1、23−1’と、移動式往復台25の一側部の下部に設置した一対の下面リニア・エンコーダ23−2、23−2’とで構成され、このように構成されたリニア・エンコーダ23が、基準マーク、垂直位置誤差を補償するためのLトラック、および水平位置[誤差]を補償するためのTトラックを有するスケールに沿って移動することで、高い精度レベルで平面度、ピッチ、真直度、ヨー、およびロールに関連した誤差を補償するものであり、したがって、加工することが不可能である部分を最小限にし、加工コストを減少させ、精密なステージを実現する。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
歯車対の評価装置及びこの評価装置を用いて最適化された歯車対
【課題】各種歯車対のバックラッシュを精度よく定量的に把握することができる歯車対の評価装置を提供する。
【解決手段】演算部6は、ギヤ歯面102G及びピニオン歯面102P上の各3次元座標データを所定の噛合回転位置で互いに関連付けギヤ101Gを基準とする円筒座標系の3次元座標データに変換する。2次元の媒介変数を用いてピニオン歯面102P上の各点を表す関数を作成し、ギヤ歯面102G上の各点に対応するピニオン歯面102P上の各点をニュートン法を用いて演算する。これらの演算により歯面のドライブ側及びコースト側の歯面間隙間情報を求め、この歯面間隙間情報に基づいてバックラッシュ情報を求める。
(もっと読む)
ガイドレールの据付精度測定装置及び測定方法
【課題】ガイドレールの据付精度を簡単且つ短時間に計測することにある。
【解決手段】昇降路内を昇降する昇降体を案内するガイドレール31の据付精度を測定する装置において、昇降体とガイドレール31との相対距離を検出する変位検出センサ34と、前記昇降体に取付けられ該昇降体の絶対変位を検出する振動系35及びこの振動系に取付けられた変位検出センサ36と、前記変位検出センサ34及び変位検出センサ36により検出された相対距離データ及び絶対変位検出データをもとにガイドレールの据付精度を演算する。
(もっと読む)
1 - 8 / 8
[ Back to top ]