
Fターム[2F073AA29]の内容
測定値信号、等のための伝送方式 (33,732) | 用途 (4,204) | ロボット (26)
Fターム[2F073AA29]に分類される特許
1 - 20 / 26
信号伝送装置及び信号伝送方法
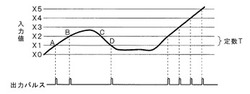
【課題】入力値の絶対値を少ないパルスで伝送することができ、且つ、受信側で得られる値が正しい値であることを短い周期で保証することができる信号伝送装置及び信号伝送方法を提供する。
【解決手段】入力値の絶対値に関する情報を含む所定ビットのワードの各ビットに対応するパルスを順に送信する。この際、入力値が所定の閾値に達したとき、及び、前回のパルス出力時から所定時間経過しても入力値が所定の閾値に達しないときに、入力値の増加、減少又は増減なしのいずれかを示す増減等情報、及び、ワードのビット情報に基づいてパルスの長さを設定し、そのパルスを送信する。これにより、入力値の絶対値に関する情報を少ないパルスで伝送することができるとともに、受信側で得られる値が正しい値であることを短い周期で保証することができる。
(もっと読む)
センサネットワーク、状態推定方法及びプログラム

【課題】センサネットワーク、状態推定方法及びプログラムにおいて、各センサノードが用いるパーティクル数にかかわらずセンサノードが送受信するデータの量を少なくすることができ、推定の信念度を確保しつつ比較的高速なセンサネットワーク構築することを目的とする。
【解決手段】観測対象の状態をパーティクルフィルタを用いて推定し、自身が用いるパーティクルの1つの状態量の区間に対して1つの尤度を付与したパーティクルの状態区間の信念度を算出して送信する複数のセンサノードと、複数のセンサノードから受信した信念度を統合して統合結果を各センサノードに送信する1個の統合ノードを備え、複数のセンサノードの各々は、自身の信念度を統合ノードから受信した統合結果に基づいて修正するように構成する。
(もっと読む)
情報処理装置および方法、プログラム、並びに通信方法
【課題】通信の衝突による通信成功率の低下を抑制することができるようにする。
【解決手段】送信予約受信部401がデータ送信予約ビーコンを受信すると、制御情報受信部402は、所定期間データ送信予約ビーコンや存在通知ビーコンを受け付ける。それらの制御情報が受信されると、制御情報送信部403は、送信権を設定し、送信権通知ビーコンやスリープ命令ビーコンを他の端末101に送信し、伝送データを送信する端末を1台の送信端末に限定する。伝送データ受信部404は、その優先送信端末より送信される伝送データを受信する。本発明は、例えば、通信装置に適用することができる。
(もっと読む)
自動工具交換装置用モジュール
【課題】第一の連結部材と第二の連結部材間において伝送効率の低下を防ぎつつ、より高い信頼性をもって電気信号の伝送を行なうことの出来る、新規な構造の自動工具交換装置用モジュールを提供すること。
【解決手段】伝送面60を除くコア部材54の外周に電磁遮蔽部材50を配設すると共に、該コア部材54と該電磁遮蔽部材50との間に該電磁遮蔽部材50よりも低い電磁遮蔽効果を有するギャップ部材56を介在せしめ、コイル部材52、コア部材54、ギャップ部材56を含んで構成されたコイルヘッド46,82を備えたコイルユニット44,80を第一のモジュール30aおよび第二のモジュール30bにそれぞれ設けた。
(もっと読む)
測定システム
【課題】被測定物の内部の複数の測定位置について短時間で測定を行う。
【解決手段】測定システム1は、被測定物IPに磁場を印加することにより被測定物IP内部の測定を行って、測定信号Smdを出力することができるセンサ部42,44,46であって、被測定物IPの互いに異なる測定位置WP2,WP4,WP6について測定を行うための複数のセンサ部42,44,46と、複数のセンサ部42,44,46からの測定信号Smdに基づいて被測定物IPの内部構造に関する情報処理を行う情報処理部10と、情報処理の結果を出力する出力部30と、を備える。
(もっと読む)
マスタ・スレーブ通信システム
【課題】1つのマスタ局と複数のスレーブ局が周波数多重通信を行う場合に、複数の分岐点からの多重反射により、通信が不安定になることを解消することを目的とする。
【解決手段】
通信線の伝達特性を計測して、占有制御方式に応じて実際に使用できるサブキャリアを抽出し、該占有制御方式で使用するフレームを送受信するためのサブキャリアを割付ける。
(もっと読む)
エンコーダ装置、および、シリアル通信方法
【課題】より信頼性の高いシリアル通信をすることが可能であるエンコーダ装置を提供する。
【解決手段】エンコーダ装置が、測定情報が予め記憶されている測定情報記憶部と、コマンド信号を受信する受信部と、受信部が受信したコマンド信号に応じて、該受信したコマンド信号に該当する測定情報を測定情報記憶部から読み出す測定情報読出部と、読み出した測定情報に対しての部分巡回冗長検査用チェックコードを生成する部分巡回冗長検査用チェックコード生成部と、測定情報と部分巡回冗長検査用チェックコードとに対しての全体巡回冗長検査用チェックコードを生成する全体巡回冗長検査用チェックコード生成部と、測定情報と部分巡回冗長検査用チェックコードと全体巡回冗長検査用チェックコードとをシリアル通信により送信する送信部とを有する。
(もっと読む)
測定システムおよび測定システムの監視方法
【課題】センサの電気エネルギー供給の停止に起因して誤って求められた位置を認識することを可能にする。
【解決手段】運動可能な要素(20)の位置を求めるためのセンサ(14)と、第1の電気エネルギー蓄積器(13)とを備え、第1の電気エネルギー蓄積器(13)が、センサ(14)の外部供給電圧(UV)の異常低下時に、記憶されているセンサ(14)のカウント内容が外部供給電圧(UV)の異常低下時に維持されたままであるように、センサ(14)の少なくとも一部に電気エネルギーを供給し、第1の電気エネルギー蓄積器(13)が第1の補助供給電圧(UH1)を発生し、第1のデータ(12)がセンサ(14)の基準マーク(3)の最初の検出時にセンサ(14)内に記憶され、センサの外部供給電圧(UV)の異常低下およびセンサ(14)の第1の補助供給電圧(UH1)の異常低下の際に第1のデータ(12)が消去される。
(もっと読む)
ヒューズ溶断防止装置および本質安全防爆装置
【課題】 送信回路に誤作動がない場合にヒューズが溶断することを防止し、ヒューズが配置される基板を交換する頻度を低減するヒューズ溶断防止装置を提供することと、送信回路から処理回路に向かう電流の大きさに関わらず、異常があれば送信回路および処理回路間を導通状態から遮断状態に切換える本質安全防爆装置を提供することである。
【解決手段】 切換回路17は、ヒューズ16に対して直列に配置され、処理回路11に異常が発生した場合に、送信回路13と処理回路11との間を遮断状態にする。検出回路18は、受信回路14が処理回路11から受信する信号に基づいて異常を検出し、制御回路19は、検出回路18が異常を検出したとき、切換回路17に送信回路13および処理回路11間の間を遮断状態にさせる。
(もっと読む)
制御システム、プログラム及び情報記憶媒体
【課題】 複数のサブシステムの統合システムに好適な制御システム等の提供。
【解決手段】制御システム25は、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つのセンサにより得られる履歴情報であって、ユーザの行動、状態及び環境の少なくとも1つについての履歴情報であるユーザ履歴情報を記憶する履歴情報記憶部262と、第1のサブシステムを利用していたユーザが、新たに第2のサブシステムの利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定部250と、利用可能イベントが発生した場合に、第1のサブシステムのセンサである第1のセンサからのセンサ情報に基づいて更新していたユーザ履歴情報を、第2のサブシステムのセンサである第2のセンサからのセンサ情報に基づいて、さらに更新する履歴情報更新部248を含む。
(もっと読む)
センサー用シリアル通信装置およびシリアル通信方法
【課題】従来の位置検出器用シリアル通信装置の場合、位置検出器等のセンサーがID番号を持っておくことが必須であり、多軸機械においてセンサー情報をサーボ制御部に与える手段としてシリアル通信を利用する場合、そのID番号の設定や管理、センサー情報のモニタリングやシリアル伝送路の断線箇所推定の手間が大きかった。
【解決手段】複数のシリアルポートを有し複数のサーボ制御部とシリアル伝送路で接続される通信マスタと、複数のシリアルポートを有し複数のセンサーとシリアル伝送路で接続されカスケード接続可能な通信スレーブで、複数のサーボ制御部と複数の位置検出期等のセンサーの間を接続し、センサーとシリアル通信のタイムスロットを対応させたシリアル通信装置を実現する。
(もっと読む)
センサ装置
【課題】バッテリによる電源供給を行い、無線回路による信号伝送を行う機械装置の状態を測定するセンサ装置において、機械装置の動作状態を検出してセンサ装置のバッテリ電源の入切ができるようにする。
【解決手段】機械装置の状態を測定するセンサ7と、センサ情報を無線により伝送する無線回路8と、これらに電源供給をするバッテリ3と、バッテリ3の電源供給を入切する電源スイッチ2と、機械装置の稼動非稼動の状態を検出する動作検知手段と、から構成し、例えば動作検知手段を圧電式振動センサ1で構成することによって、機械装置の稼動開始時の振動によって動作開始を検出して電源スイッチ2の投入及び切断を行う構成とする
(もっと読む)
無線出力センサ、近接センサ、加工装置、および制御システム
【課題】信号ケーブル等の配線簡略化を可能とした無線出力センサ、近接センサ、加工装置、および制御システムを提供すること。
【解決手段】樹脂製の密封筐体12内に、検出対象を非接触に検出する非接触センサ部36と、非接触センサ部36の検出に係るセンサデータを送信IDコードを含めて特定小電力無線で送信する処理をする無線送信部38と、無線送信部38の処理に係るセンサデータを送信する送信アンテナ24と、非接触センサ部36と無線送信部38それぞれの電源となる電池を搭載する電池搭載部26とを備えた構成。
(もっと読む)
シリアル出力エンコーダ信号の出力方法
【課題】本発明は、複数の通信フォーマットを内蔵した外部メモリを用い、客先回路からの要求に従ったフォーマットでシリアル通信を行うことを目的とする。
【解決手段】本発明によるシリアル出力エンコーダ信号の出力方法は、通信ブロック(3)に接続された外部メモリ(6)に複数の通信フォーマット(6a)を内蔵させ、外部からの要求による通信フォーマット(6a)を用いてシリアル通信(2)を行う方法である。
(もっと読む)
測定プローブ用の信号送信装置
タッチトリガー、または、アナログプローブなどの測定プローブ(12、110、250)が説明され、それは、振れ可能なスタイラス部(14)と、スタイラスの振れデータを遠隔プローブインターフェイス(20、104、254)に送信するための無線通信ユニット(18)とを含む。無線通信ユニット(18)は、スタイラスの振れデータ,および,プローブのアイデンティティコードを含むデジタルデータのパケットを送信するように配置される。無線通信ユニット(18)により、利用者によって前記プローブのアイデンティティコードが、設定可能とされる。測定プローブ(12、110、250)は、無線周波数(RF)のスペクトラム拡散リンク(106)で、関連するプローブインターフェイス(20、104、254)と通信し得る。  (もっと読む)
(もっと読む)
ロボット制御システム
【課題】センサユニットを備えるロボット制御装置において、ロボット動作中においてもセンサユニットの機能をリアルタイムで変更する。
【解決手段】センサユニット10のCPU22は、ロボット動作中においてセンサ15のセンサ出力を制御周期内の送信周期においてロボットCPU12に送信する。制御周期の残りの受信周期においてロボットCPU12は更新パラメータをCPU22に送信する。CPU22は更新パラメータを受信し、RAM16の記憶領域のうちデフォルトのパラメータが記憶されている第1領域と異なる第2領域に書き込む。CPU22は、さらにロボットCPU12から更新コマンドを受信すると、パラメータをデフォルトから第2領域に記憶された更新パラメータに切り替えて処理を実行する。
(もっと読む)
エンコーダ
【課題】 ロボットや工作機械に使用されるエンコーダの通信装置を高速化しロボットや工作機械の高速動作に対応できるようにする。
【解決手段】 被検物の状態に応じた信号を検出する検出部と、この検出部から出力された信号から被検物の位置情報を算出して記憶し、記憶された位置情報を上位装置20にシリアル通信で送信する信号処理部5とから構成されるエンコーダ10において、上位装置20からコマンドデータを受信して、このコマンドデータが双方向通信要求コマンドのときに、要求された位置情報等を送信する双方向通信モードM1と、コマンドデータが単方向通信要求コマンドのときに、単方向送信処理S105を実行して位置情報を送信する単方向通信モードM2と、コマンドデータが疑似単方向通信要求コマンドのときに、疑似単方向送信処理S107を実行して位置情報を送信する疑似単方向通信モードM3とを有して構成される。
(もっと読む)
ロボット制御システムおよびロボットの制御方法
センサユニット(10)のCPU(22)は、ロボット動作中においてセンサ(15)のセンサ出力を制御周期内の送信周期においてロボットCPU(12)に送信する。制御周期の残りの受信周期においてロボットCPU(12)は更新パラメータをCPU(22)に送信する。CPU(22)は更新パラメータを受信し、RAM(16)の記憶領域のうちデフォルトのパラメータが記憶されている第1領域と異なる第2領域に書き込む。CPU(22)は、さらにロボットCPU(12)から更新コマンドを受信すると、パラメータをデフォルトから第2領域に記憶された更新パラメータに切り替えて処理を実行する。  (もっと読む)
(もっと読む)
RFID型触覚センサ及びRFID型触覚センサ入力装置
【課題】センサ設置位置に関係なく安定した検出感度を得ることができ、しかも、構造が簡単で配線量を大幅に削減することが可能な触覚センサを提供する。
【解決手段】外部電磁波による電力供給と信号伝達を行うアンテナ一体型の無線タグT1と、圧力を検出する感圧素子4とを有し、無線タグT1上に感圧素子4を配置している。このようにアンテナ一体型の無線タグT1上に感圧素子4を単に配置する構造とすることにより、センサ構造が単純となり、量産効果によるコストダウンを図ることができる。しかも、無線タグT1上に感圧素子4を配置し、接触圧力等の感圧を直接検出する構造とすることで、設置位置に関係なく、常に安定した検出感度を得ることができる。さらに、RFID用タグを用いることで、無線による電力供給とセンサ検出データの通信を行うことが可能となり、配線量を大幅に削減することができる。
(もっと読む)
フレキシブルセンサチューブ
【課題】
瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】
瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
1 - 20 / 26
[ Back to top ]