
Fターム[2F076BE09]の内容
指示記録装置の試験較正と測定試験一般 (4,775) | 測定・試験・監視に共通な手段 (2,016) | 同種・異種の多入力信号処理 (151)
Fターム[2F076BE09]に分類される特許
81 - 100 / 151
事物決定装置、事物決定方法、プログラムおよび記録媒体
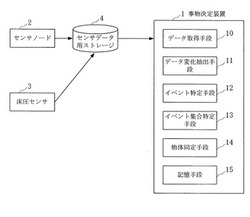
【課題】センサノードが装着された物体及び物体の状態を推定する。
【解決手段】事物決定装置1は、センサノード2から受信したセンサデータから変化が起こっている区間を抽出するデータ変化抽出手段11と、抽出した変化から、物体の事象であるイベントを特定するイベント特定手段12と、複数のイベントの中から略同時に起こっているイベント同士をグループ化してイベント集合を求め、イベント集合を時系列順に並べることでイベント集合系列を求めるイベント集合特定手段13と、物体の状態と物体に起こり得る状態間遷移の関係を物体毎に記述した複数の状態遷移図を予め記憶する記憶手段15と、状態遷移図毎にイベント集合系列が得られる尤もらしさを求めることにより、センサノード2が装着された物体と物体の状態を同定する物体同定手段14とを有する。
(もっと読む)
航空推進用途に対する内蔵型飛行センサのための全ファイバ・アーキテクチャ
レーザと、上記レーザと光通信する一個以上の飛行センサと、上記飛行センサと光通信するデータ処理デバイスとを有する内蔵型飛行センサ・システム。上記飛行センサは、光学的検出器と組み合わされたファイバ・ブラッグ格子;分光学的格子および検出器;および;捕捉側光学機器と光学的に組み合わされた光学的検出器;などの、レーザ式の光学的構成要素とされ得る。上記飛行センサにより検知されたパラメータは、任意の飛行パラメータを決定するために使用され得る。代表的な飛行パラメータとしては、限定的なものとしてではなく、機体もしくは外側表面の温度、空気流の速度、燃焼領域の温度、エンジン取入口の温度、気体の濃度、または、衝撃波面の位置が挙げられる。 (もっと読む)
異常監視装置

【課題】競合学習型ニューラルネットワークの規模を大きくせずに複数種類の対象信号を用いて機器の異常の予兆を早期に検出可能とする。
【解決手段】信号入力部2は、機器Xの動作により生じる複数種類の対象信号を取り込む。各対象信号の特徴を表す特徴ベクトルを特徴抽出部4でそれぞれ抽出する。カテゴリ分類部1は、特徴抽出部4により抽出した各特徴ベクトルを入力データとする競合学習型ニューラルネットワークを用いて構成される。乖離度演算部5は、カテゴリ分類部1における出力層のニューロンに設定された重みベクトルと機器Xの動作により得られた各特徴ベクトルとの差分ベクトルの大きさを乖離度として求める。判別部6は、各対象信号から得られた乖離度を要素とする多次元の乖離度ベクトルの存在領域により機器Xの異常の有無を判別する。
(もっと読む)
異常監視装置
【課題】規定の順序で動作が変化する機器について正常・異常の判定が可能な異常監視装置を提供する。
【解決手段】機器Xは規定順序で複数種類の動作を行う。機器Xの動作により生じる対象信号を信号入力部2が取り込み、特徴抽出部3が抽出した対象信号の特徴量を入力データとして機器Xの各動作に対応した学習データによる学習済みの複数の競合学習型ニューラルネットワーク(ニューラルネット)1a,1b,……に入力する。判定部7では、乖離度が最小であるニューラルネット1a,1b,……に着目し、このニューラルネット1a,1b,……において発火したニューロンのカテゴリが異常か、発火したニューロンのカテゴリが正常でこのニューラルネット1a,1b,……に対応付けた機器Xの動作順序が入力データを生成した機器Xの動作順序と一致しないと、異常と判定する。
(もっと読む)
機載された計測プローブのための多センサ測定装置
本発明は、計測システムのための多センサ測定装置であって、プローブに対して軸方向の所定位置に離隔されるように容量型プローブ(100)の軸線に沿って挿入されるように構成されたインサート(160)と、少なくとも1つのMEMSセンサを備えており、複数のセンサ(210)が取り付けられたサポート(200)と、前記インサートから前記軸線に沿って所定距離の位置で前記サポートを維持するための保持手段(180,185,190,195)とを備えていることを特徴とする測定装置に関する。  (もっと読む)
(もっと読む)
プロセス異常診断装置及びプロセス監視システム
【課題】Aタイプの誤りとBタイプの誤りのトレードオフの適正化を図り、正確な異常検出と共に、実際的なプロセス監視に適切な異常診断性能を実現したプロセス異常診断装置を提供することにある。
【解決手段】統計量データに含まれる異常データと正常データとの割合に関する事前情報を生成する事前情報生成手段51と、前記事前情報を使用して、前記統計量データの異常状態と正常状態の判定を行うための閾値を決定する閾値決定手段52と、閾値及び前記統計量データを使用して、前記対象プロセスの異常を診断する異常診断手段7とを備えたプロセス異常診断装置である。
(もっと読む)
光ファイバ広域センサシステム
【課題】信号光送受および処理機能等を有する送受処理部を複数式有し、任意の送受処理部で任意のセンサアレイの共有化を可能とする光ファイバ広域センサシステムを提供する。
【解決手段】送受処理部20−iは、信号光源と送信ゲートとブースアンプを有する信号光源部21と、これに接続される往路伝送ファイバと、復路伝送ファイバに接続される受光部23とDMUX7と復調処理部8−1,8−2,…を有する信号受信部とを有する受信部とからなり、合分波増幅器30−iは送受用アンプ31と、多波長励起光源35と、送受用カプラ32と、2個のバス用カプラ33−1,33−2と、これらの間に接続されるバス用アンプ34とからなり、アレイ用合分波器40−iは、2個の合分波器41−1,41−2と、アレイ結合器42−1と、リモートアンプ43−1と、励起光分波器45−1とを備える。
(もっと読む)
センサシステムおよびセンサ素子ならびに閉鎖メカニズムを監視する方法
モータ駆動される閉鎖メカニズムたとえば電動モータ駆動型ウィンドウシステムにおいて、互いに相対的に運動する2つの部材間に物体が挟み込まれた状態を確実に検出できるようにする目的で、センサシステムは光学的圧力センサと、さらにこれに加えて電気的な容量センサを有している。光学的圧力センサには、光導波部材と、光導波部材に光を入射する光源と、出射された光を捕捉する光センサが設けられている。電気的センサには、電圧源と接続された電極が設けられている。これら両方のセンサに対応して、各々の信号を評価するための評価ユニットが設けられている。  (もっと読む)
(もっと読む)
地形監視システム及び該地形監視システムに用いる圧力感知装置
【課題】正確な計測結果を提供できる地形監視システムを提供する。
【解決手段】内部空間327と、該内部空間327を外部と連通する第1と第2の開口325,326とを有するハウシングユニット32と、ハウシングユニット32に張り付けられる圧力感知面312を有し、第1の開口325を密封する圧力センサー31と、ハウシングユニット32に張り付けられて第2の開口326を密封する可撓性シート33と、ハウシングユニット32の内部空間327に注入した液状ミディアム34とを有する圧力感知装置3であって、可撓性シート33が外部圧力の作用により変形すると、対応する圧力が液状ミディアム34を経由して圧力センサー31に伝わり、圧力感知信号を生成する。この圧力感知装置3を複数取り付け、監視する地形の近辺にある所定位置に固定される少なくとも一本の設置フレーム2を有する地形監視システムを提供する。
(もっと読む)
センサ装置、センサシステム及び異種物理量を検出可能なセンサ装置の接続方法
【課題】単機能センサ同士を接続、通信可能としてセンサのみで異種計測値に基づく演算、制御が可能なセンサシステムを構築する。
【解決手段】第1の物理量を検出するための検出手段と、検出手段で検出された検出量に基づいて所定の処理を行う演算手段と、検出手段で検出された物理量と異なる第2の物理量を検出可能な他のセンサ装置と電気的に接続可能で、該他のセンサ装置とデータ通信を行うための通信インターフェース3と、通信インターフェース3に接続されている他のセンサ装置の有無、及び通信インターフェース3を介して、接続される他のセンサ装置が検出する第2の物理量の種別を判定可能な種別判定手段とを備えており、演算手段は、検出手段で検出された第1の物理量に関する検出量と、他のセンサ装置で検出された第2の物理量に関する検出量とに基づいて演算可能としている。
(もっと読む)
検出器の作動方法、および検出器と通信する制御装置
検出器(1)は検出装置(4)によって少なくとも1つのアナログ信号(A)を検出し、評価装置(5)によって少なくとも1つのアナログ信号(A)を使用して少なくとも1つのデジタル信号(D)を作成し、少なくとも1つのデジタル信号(D)は検出器外部の制御装置(2)へ送られる。検出器(1)の監視装置(6)にアナログ信号(A)またはアナログ信号(A)およびデジタル信号(D)が供給される。監視装置(6)は、監視しているの装置(4,5)が適正に機能している場合にのみイネーブル信号(F)を制御部(2)へ送る。通常モードにおいて制御装置(2)は、イネーブル信号(F)も送られてきている場合にのみ、デジタル信号(D)をさらに処理する。さもなければ、制御装置は送られたデジタル信号(D)にエラーが含まれていると評価し、検出器(1)の誤機能に関するメッセージを出力する。制御装置(2)はときおり検査信号(P)を検出器(1)に送って通常モードから検査モードへ切り換わる。検出器(1)は検査信号(P)の伝送に基づいて検査モードに入り、検査モードにおいて監視装置(6)に供給された信号(A,D)を操作して、監視装置(6)が適正に機能している場合には監視装置(6)に、監視している装置(4,5)の適正でない機能を識別させる。制御装置(2)は検査モードにおいて、イネーブル信号(F)が制御装置にそれぞれ加えられて送られる場合、検出器(1)の誤機能に関するメッセージを出力する。  (もっと読む)
(もっと読む)
信号識別方法
【課題】競合学習型ニューラルネットワークを用いて信号のカテゴリを判別するにあたり、カテゴリの境界付近の入力データを高い精度で判別する。
【解決手段】競合学習型ニューラルネットワーク1の学習によって作成されたクラスタリングマップの各ニューロンにガウス関数を割り当てる。ガウス関数の平均値と分散は、学習済みの競合学習型ニューラルネットワーク1における重みベクトルと学習データとを用いて求める。監視対象物から得られた入力データのカテゴリを判定する際には、入力データに対するガウス関数の出力値の総和に基づいて、カテゴリの境界である入力データを判別する。クラスタリングマップにガウス関数を設定することにより、カテゴリの判定精度が向上し、各学習データにガウス関数を設定する場合に比較して処理時間を大幅に短縮できる。
(もっと読む)
特異パターン検出システム、モデル学習装置、特異パターン検出装置、特異パターン検出方法、及び、コンピュータプログラム
【課題】多数の多様なセンサを含むセンサネットワークにおいて、センサ間の依存関係や各センサの観測値の統計的な振舞いから想定外の異常を検出する。
【解決手段】モデル学習サーバ300は、データベースサーバ200から、センサネットワーク100内の各センサから得た観測値を示す観測データを受信し、この観測データから親センサ群を求めるとともに、求められたセンサと親センサ群との依存関係を元に、センサ観測値の統計的なパラメータを求めて、特異パターン検出サーバ400に送信する。特異パターン検出サーバ400は、データベースサーバ200から、特異パターン検出対象となる各観測時刻ごとの観測データである観測パターンを受信し、親センサ群の情報と統計的なパラメータを用いて、受信した観測パターンの特異性を判定し、異常検出時にユーザ端末500へ警告を通知する。
(もっと読む)
物理量検出装置、格納ユニット、コントロールユニット及びプログラム記憶媒体
【課題】予め複数の処理プログラムを備えることなく、検出対象に応じた処理を行うことが可能な物理量検出装置等を提供する。
【解決手段】流体が流れる流路の状態検知に先立って行われるティーチングモード時に、流体の圧力及び流量をサンプリングするとともに、流路の状態を検知する検出モード時にも流体の圧力及び流量をサンプリングし、検出モード時に得られる圧力におけるティーチングモード時の流量と検出モード時の流量との差が所定値以上である場合には、流路に目詰まりが生じていると判断する。
(もっと読む)
センサーインタフェース並びにセンサーインタフェースに関連する方法および装置
センサーインタフェースは、いくつかのセンサー入力およびいくつかのクライアント入力を備える。クライアント入力は、いくつかのクライアントからいくつかのデータ要求を受信するように環境設定されている。いくつかのデータ要求は、特定の種類のデータを取り込むときに使用されるべき特定の物理センサーを識別することなく、戻されるべき特定の種類のデータを指定する少なくとも1つのデータ要求を含む。プロセッサーは、i)いくつかのデータ要求を満たすにはどのセンサーデータを使用することができるかを決定し、ii)いくつかの物理センサーからセンサーデータを受信するようにセンサー入力の中のいくつかを環境設定し、そして、iii)可能であれば、受信されたセンサーデータを用いていくつかのデータ要求を満たすように、環境設定されている。また、このようなセンサーインタフェースに関連する方法および装置が、開示される。  (もっと読む)
(もっと読む)
建造物診断システム
【課題】外部データを利用することで、閾値等の判定基準値によることなく建造物の異常検知が可能な建造物診断システムを提供する。
【解決手段】診断手段150では、現在値データを所定の閾値あるいは履歴データと比較して正常範囲にあるか否かを判定するのに加えて、前記現在値データが前記正常範囲内にあると判定された場合に、さらに外部データを用いた異常判定を行う。外部データを用いた異常判定では、現在正常範囲にある前記現在値データが今後どのように変化するかを外部データを用いて推定する。この推定では、必要に応じて前記履歴データも使用するようにすることもできる。
(もっと読む)
共通パッケージ内で複数の測定量を測定するための組合せセンサ
モジュラセンサシステムが、感知動作のための複数の感知測定量を提供する複数の様々なタイプのセンサを含む。ハウジングが、一般に、様々なタイプのセンサに関連付けられ、それによりハウジングが、センサによって感知すべき媒体を導入する。また、電気的インターフェースが、センサに接続されることがあり、電気的インターフェースは、感知感度を最大にするため、および感知動作に関するセンサの感知再現性および正確なセンサ補償を提供するために、選択されたセンサへの論理的物理的接続を形成できるようにする。 (もっと読む)
移動体装置の高度を判断する方法及び装置
環境圧力又は温度の変化から高度変化を分離するために、圧力センサからの圧力情報と、加速度計、ジャイロスコープ、及び地磁気センサなどの推測航法(dead reckoning)センサ又は他の動きセンサからの動き情報と、温度センサからの温度情報とを結合する方法及び装置。動き又は温度変化なしの計測された圧力の変化は、天候関連の気圧変化でなければならない。関連の温度変化があって、動きがなく、かつ、通常の天候の変化に対して変化の割合が速すぎる場合、測定された変化は、温度による圧力センサの感度の変化を表し、センサキャリブレーションを調整することができる。測定可能な垂直方向の移動がない、水平方向の動きに関連した急激な圧力変化は、異なる圧力環境への移動を表す。測定可能な垂直方向の移動に関連する圧力変化のみが、真の高度変化である。  (もっと読む)
(もっと読む)
複数機能センサ回路
例えば、多機能安定回路は温度と圧力との両方を測定する。それは圧力検知可変容量と固定基準容量とを有し、定電流源と温度可変電流源とを有する。完全サイクルは少なくとも2つのフェーズを有している;(1)1の基準容量と1の圧力可変容量を使うサイクルのフェーズ、及び(2)少なくとも基準容量と少なくとも1の温度可変充電源を含むたのフェーズ。他の複数スロープ複数機能が実行される。 (もっと読む)
動き認識システムおよび動き認識方法
【課題】複数の加速度センサからの情報に基づいて環境における動きを適切に認識する。
【解決手段】センサノード1−1〜1−4からの加速度データより、所定の時間幅(例えば、1秒)毎に実観測の特徴データを求め、この実観測の特徴データに類似度の高いサンプル観測の部分動作のラベルを付与する。実観測の特徴データに類似の高い部分動作のラベルが付与される毎に、それまでの実観測の特徴データに付与されたラベル列と動作辞書24A中の部分動作のラベル列との間でマッチングを行って、動作辞書24A中の尤度の高いサンプル動作をその時の環境における動きとして認識する。
(もっと読む)
81 - 100 / 151
[ Back to top ]