
Fターム[2F077NN27]の内容
感知要素の出力の伝達及び変換 (32,270) | 計数型(スケール部材、符号部材) (4,729) | 目盛又は符号の形式 (2,536) | 光学スケール (326)
Fターム[2F077NN27]の下位に属するFターム
Fターム[2F077NN27]に分類される特許
1 - 20 / 123
変位検出装置、目盛の校正方法及び目盛の校正プログラム
【課題】容易且つ安価に構成でき、高精度な目盛の測定誤差の校正を可能とする。
【解決手段】光電式エンコーダ100は、スケール10、検出ユニット20、演算部30を有する。検出ユニット20は、少なくとも3つの検出部21〜23を有する。各検出部は、第1検出部21及び第2検出部22間の測定点の間隔が、物理的に配置可能な最小間隔dとなるように配置され、第2検出部22及び第3検出部23間の測定点の間隔が、最小間隔dよりも大きな間隔となるように配置される。第1検出部21の測定点の出力を1ステップ前の他の検出部の測定点に合わせるように制御しつつ検出ユニット20をステップさせてサンプリングを行う。各検出部の測定点の間隔がすべてd以上となるにもかかわらず、d以下のサンプリング間隔で測定誤差を算出し、自律校正曲線を得てスケールの位置情報を補正することができる。
(もっと読む)
スケール装置

【課題】使用環境の温度変化の影響を抑え、位置決め対象の正確な位置制御が可能なスケール装置を提供する。
【解決手段】一方向に目盛りが配列されたスケール11と、スケール11を取付けるベース部14と、スケール11の目盛りを読み取る読取ヘッド12と、を備えるスケール装置10であり、スケール11は、目盛りが付された方向である目盛り方向の一端においてベース部14に固定される固定部15と、反対側の端部において直動ガイド13を介してベース部14に取付けられるガイド取付け部18とでベース部14に取付けられており、直動ガイド13が動く方向と目盛り方向とが同一であることを特徴とする。
(もっと読む)
長さ測定システムの取付け装置
【課題】
長さ測定システムをできるだけ安定して保持することができる、最小の構造サイズの取付け装置を提供する。
【解決手段】
取付け装置(1)が、1つの基体(1)と少なくとも1つのホルダ(4)を備え、ホルダ(4)が、挟持することによって長さ測定システム(2)を基体(1)に保持するために、基体(1)の切欠き(14)内で移動可能であり、ホルダ(4)が回転不能に縦方向にガイドされるように、ホルダ(4)と切欠き(14)が形成されていることを特徴とする、長さ測定システム(2)を取り付けるための取付け装置(1)。
(もっと読む)
エンコーダ装置及びエンコーダ装置の回転情報検出方法
【課題】外部バッテリを用いずに、多回転情報を得ることができるエンコーダシステム及び信号処理方法を提供すること。
【解決手段】所定の回転軸を中心として回転する回転部と、当該回転部の第一回転情報を検出する第一検出部と、当該第一検出部とは別に回転部の第二回転情報を検出する第二検出部と、第一検出部又は第二検出部における検出結果の異常の有無を検出する制御部とを備える。
(もっと読む)
エンコーダ
【課題】歯車機構を備えた位置検出装置と光学式エンコーダ装置とを備えたエンコーダを提供する。
【解決手段】ハウジング3が第1の収納部11と第2の収納部13との間に軸受けホルダ9を備えている。軸受けホルダ9は、歯車機構21と光学式エンコーダ装置7とを隔離する隔壁部を構成する。歯車機構21と光学式エンコーダ装置7とを隔離すると、歯車機構21から発生する磨耗粉やグリスが飛散して、光学式エンコーダ装置7の構成部品に付着することを確実に防止することができる。
(もっと読む)
スケールの目盛保護構造
【課題】カバーガラスを目盛部に接着する接着剤の厚さむらに起因するエンコーダの出力変動を防止できるようにする。
【解決手段】スケール基板12上に形成された目盛部14が、その上面側に配されたカバーガラス16で保護されたスケールの目盛保護構造において、前記カバーガラスが、前記目盛部の周囲に配設された高さ規定部30を介して、前記スケール基板上に支持され、前記高さ規定部が、前記カバーガラスの下面に、前記目盛部の周囲に対応するパターンに予め形成され、且つ、その下端が前記スケール基板の上面に当接され、更に、前記スケール基板と前記カバーガラスとが、前記高さ規定部の周囲に配置した接着剤で接合されている。
(もっと読む)
線形位置測定システム
【課題】夫々位置マーキングを有し、複数の個別レールに従って夫々設置されている複数の測定スケールと、台車が案内される夫々の個別レールに関連する台車の夫々の位置を決定することを可能にする。
【解決手段】複数の個別レール12’、12’’、12’’’と台車に固定され、位置マーキングをスキャンするように設計された少なくとも1つのスキャナとを有する台車が案内される複数の個別レール12’、12’’、12’’’を線形上に有するスライドレール10に関連する台車の位置を決定するための線形位置測定システムにおいて、全ての複数の個別レール12’、12’’、12’’’の位置マーキングは、夫々複数の測定スケールで同様に配置される。情報の断片は、台車が案内される各々の個別レールで収集されるために別々の個別コード24’、24’’、24’’’が個別レール12’、12’’、12’’’に設けられ、スキャナによってスキャンされる。
(もっと読む)
光学式アブソリュートエンコーダ及び装置
【課題】90度位相差の2つの正弦波信号を内挿演算することによって高分解能で回転位置を検出する光学式エンコーダにおいて、部品を追加することなく容易な手段で光学系の異常を検出することが可能な光学式エンコーダを提供する。
【解決手段】90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常レベルを記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力する。
(もっと読む)
回転角度計測方法、回転角度計測装置、エンジンバルブ制御方法、およびエンジンバルブ制御装置
【課題】 本発明は、ロータリエンコーダ等、回転軸が一定回転角度回転するごとにパルス信号を出力するセンサから出力されるパルス信号に基づいて回転軸の回転角度を計測する回転角度計測方法等に関し、回転軸の回転角度を高精度に計測する。
【解決手段】 回転軸の回転速度を模擬した模擬データを取得し、その模擬データに基づいて、回転軸が一定角度回転するごとに出力されるパルス信号間の時間間隔を表わす時間データを算出し、その時間データに応じた計測遅れ角度を表わす遅れ角度データを算出することにより、回転速度と計測遅れ角度との対応関係を作成しておき、実際の計測において、回転軸の回転に伴うパルス信号から回転角度を算出し、その算出された回転速度を上記の対応関係に基づいて補正する。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、当該第一部材の側面の側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】光学パターンを介した光を検出する光検出部が実装された第一チップと、当該第一チップとの間で互いに表面を対向させた状態で接合され、磁気パターンによる磁場を検出する磁場検出部が実装された第二チップとを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び当該第一部材のうち光の入射面に対して反対の面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
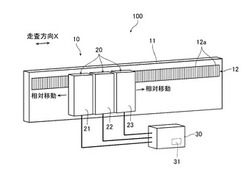
位置検出用スケールの計測装置、位置検出用スケールの計測方法、及びスケールの製造方法
【課題】位置検出用スケールの誤差を検出する精度を向上させる。
【解決手段】位置検出用スケールの計測装置は、位置検出に使用されるスケールの位置情報を検出する複数の検出部を有し、スケールに対して移動方向に相対的に移動する位置検出部と、複数の検出部のうち少なくとも2つの検出部による検出結果に基づいて、スケールの誤差を検出する誤差検出部と、を備える。そして、複数の検出部のうち少なくとも2つの検出部は、移動方向において互いに所定の第1間隔で配置されている。
(もっと読む)
角度測定装置の組立体およびこの組立体を製造するための方法
【課題】 簡易でかつ安定した目盛担持体の組立てを可能にする、角度測定装置のための組立体を提供することである。
【解決手段】−前記目盛担持体(1)に位置決め部材(3)が第一の材料一体的結合部を用いて固定されていること、
−目盛担持体(1)を担持している位置決め部材(3)が、支持体(2)の凹部(21)内に配置されており、位置決め部材(3)が半径方向で遊びがなく位置決めされるように凹部(21)が採寸されていること、そして
−目盛担持体(1)と支持体(2)の間に第二の材料一体的結合部が設けられていることにより解決される。
(もっと読む)
エンコーダ
【課題】振動や衝撃を受けたときのプリント板の振動を簡易な構成で抑制できる、信頼性の高いエンコーダを提供することを目的とする。
【解決手段】エンコーダ10は、ハウジング12と、ハウジング12内に設けられかつ被測定体の回転部と同期回転するように構成された略円板状の回転コード板14と、ハウジング12に取り付けられかつコード板14の上方に配置されたプリント板16とを有し、さらに、エンコーダに加わった振動や衝撃等によって共振しているときのプリント板16の変位が大きくなる箇所においてプリント板16に当接するような形状を備えた補強部材20を有する。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
エンコーダ装置、及び駆動装置
【課題】検出精度を向上する。
【解決手段】エンコーダ装置は、被駆動体の位置に対応する信号を出力する検出部と、位置を示す第1位置情報を補正する補正値情報を記憶する記憶部と、被駆動体の位置に対応する信号に基づいて第1位置情報を生成し、生成した第1位置情報を、記憶部から読み出した補正値情報に基づいて補正する信号処理部とを備える。また、補正値情報は、位置に対応して測定された位置情報の誤差を示す誤差特性に基づいて生成された情報であって、誤差特性を所定の位置情報における複数の区間に分割し、分割した区間の境界ごとに、当該境界の前後の区間における誤差特性に基づいて生成された境界における近似値を平均して生成された誤差情報と、境界の位置を示す第2位置情報とが関連付けられた情報を有する。
(もっと読む)
角度測定装置
【課題】確実性と精密度に関して高度の仕様を満す角度測定装置を提供する。
【解決手段】第一部品グループは、目盛板が固定されていると共にシャフト10aを包囲して収容するためのキャリア要素1.1a、接続要素1.2a、およびキャリア要素1.1aに対して相対的に接続要素1.2aを固定する手段1.3を含んでいる。第二部品グループは、目盛板を走査検知するためのセンサ要素を含んでいる。キャリア要素1.1aおよび接続要素1.2aは、軸を中心にした回転トルクを接続要素1.2aとキャリア要素1.1a間で形状合致して伝達できるようにすることにより、接続要素1.2aがキャリア要素1.1aと有効接続できるように構成されており、そのとき接続要素1.2aを固定する手段1.3を介して接続要素1.2aを、軸方向移動により形状合致位置に来させることができると共に、半径方向でシャフト10aに対して予圧することができる。
(もっと読む)
回転検出機能付き滑り軸受装置
【課題】 回転検出機能部の外径寸法を小さく抑えることができ、回転検出精度を向上させることができる回転検出機能付き滑り軸受装置を提供する。
【解決手段】 内周面が軸5に対して接する滑り軸受部6、および軸5の回転を検出する回転センサ部15を軸方向に並べて一体に設ける。軸5と一体に、その外周面に被検出部4を設け、この被検出部4を回転センサ部15のセンサ12で検出する。被検出部4は、例えば、多極着磁されたゴム磁石またはプラスチック磁石からなる環状の磁気エンコーダとされる。
(もっと読む)
1 - 20 / 123
[ Back to top ]