
Fターム[2F077QQ17]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | 回転数、所定移動量の計数手段を持つもの (91)
Fターム[2F077QQ17]に分類される特許
1 - 20 / 91
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
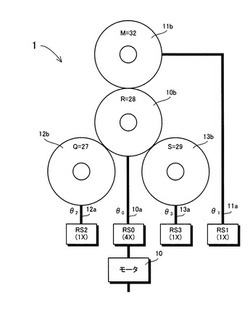
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
エンコーダおよびこれを備えた装置

【課題】エンコーダにおいて、三角関数演算の回数を削減する。
【解決手段】エンコーダは、周期パターン11が設けられたスケール10と、スケールとの相対移動が可能であり、周期パターンを読み取って、それぞれ周期パターンに応じた変化周期を有し、かつ互いに位相が異なる複数のアナログ信号を出力するセンサ20と、該センサから出力された複数のアナログ信号を時分割でアナログ−デジタル変換して複数のデジタル信号を生成するA/D変換部30と、複数のデジタル信号から位相を検出する位相検出部60と、スケールとセンサとの相対移動速度と位相検出部により検出された位相とを用いて補正値を算出し、該補正値と位相検出部により検出された位相とから補正位相を算出する補正部70と、該補正位相を用いて、スケールとセンサとの相対移動方向での位置を求める位置検出部80とを有する。
(もっと読む)
高分解能非接触式多回転検出システムおよび方法
【課題】高分解能で非接触の態様でシャフトの多回転位置を計測するシステムおよび方法を提供すること。
【解決手段】一実施形態で、多回転検出装置は、シャフトによってなされた回転数を決定するように構成された回転カウンタと、所定の回転の中でシャフトの角度位置を計測するように構成された角度位置センサとを含むことが可能である。回転数は、Mビットの分解能によって決定可能であり、1回転当たりの角度位置は、Nビットの分解能によって計測可能である。適切に選択されているので、回転カウンタは、比較的低い分解能として作動するように構成可能であるが、多回転検出装置は、全範囲にわたって1回転当たりNビットの角度分解能を維持することが可能である。したがって、多回転検出装置はM+Nビットの実効分解能を有することが可能である。
(もっと読む)
回転角度計測方法、回転角度計測装置、エンジンバルブ制御方法、およびエンジンバルブ制御装置
【課題】 本発明は、ロータリエンコーダ等、回転軸が一定回転角度回転するごとにパルス信号を出力するセンサから出力されるパルス信号に基づいて回転軸の回転角度を計測する回転角度計測方法等に関し、回転軸の回転角度を高精度に計測する。
【解決手段】 回転軸の回転速度を模擬した模擬データを取得し、その模擬データに基づいて、回転軸が一定角度回転するごとに出力されるパルス信号間の時間間隔を表わす時間データを算出し、その時間データに応じた計測遅れ角度を表わす遅れ角度データを算出することにより、回転速度と計測遅れ角度との対応関係を作成しておき、実際の計測において、回転軸の回転に伴うパルス信号から回転角度を算出し、その算出された回転速度を上記の対応関係に基づいて補正する。
(もっと読む)
エンコーダ装置、駆動装置、及びロボットシステム
【課題】駆動部を高精度に制御する。
【解決手段】エンコーダ装置は、駆動部によって回転される回転軸の角度位置に応じた第1の検出信号を出力する第1のエンコーダと、第1のエンコーダで検出される第1の検出信号に基づいて、回転軸の角度位置を検出する第1の角度位置検出回路と、回転軸の角度位置に応じた第2の検出信号を出力する第2のエンコーダと、第2のエンコーダで検出される第2の検出信号に基づいて、回転軸の角度位置を検出する第2の角度位置検出回路と、第1の角度位置検出回路と第2の角度位置検出回路とに対して、同一の周波数発生源によって生成された動作クロックを供給する動作クロック供給部と、を備える。
(もっと読む)
多回転アブソリュート回転角検出装置
【課題】モータ出力軸に連結されたモータ回転軸の多回転アブソリュート回転角を高精度に計算する方法を提供する。
【解決手段】本発明に係る計算方法を用いる回転角検出装置は、モータ回転軸の回転角θ1に対して第n回転軸の回転角θnがθn=(−(m±1)/m)n−1×θ1を満たすことを特徴とする。この関係を満たすギア機構において、第1回転軸の多回転回転角を第1回転軸の回転角度である第1回転軸の検出値p1と第1回転軸の回転数に対応するR0×m0+R1×m1+・・・Rn−2×mn−2とに展開し、各軸の角度検出器の検出値に基づいて係数R0〜Rn−2を求め、第1回転軸の多回転回転角を計算する。第2回転軸以降の角度検出器で生じた検出誤差を有効に抑圧することができ、高精度な多回転回転角を計算することができる。また、複数系列のギア機構を並列に設け、それらのギア機構から得られる検出値に基づき、より広い回転角検出範囲を達成することができる。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び当該第一部材のうち光の入射面に対して反対の面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供する。
【解決手段】光学パターンを介した光を検出する光検出部20と、磁気パターンによる磁場を検出する磁性薄膜をそれぞれ有す第1検出部31と第2検出部32からなる磁場検出部30とを備え、光検出部20と磁場検出部30とは、同一のチップ基板10に第1検出部31と第2検出部32が光検出部20を挟む位置に配置されている。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、当該第一部材の側面の側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】磁気パターンを有する単一部材として形成され、光学パターンを有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
回転運動または周回運動を検出する運動検出装置
【課題】被検出体の回転数等の計数を行う無電源の運動検出装置において、被検出体の回転数等の検出の正確性を損なうことなく、運動検出装置の小型化、軽量化、低コスト化を図る。
【解決手段】回転運動する可動部13の外周部にスタンバイ磁石15、17およびアウトプット磁石16を周方向に間隔Daをもって設け、可動部13の周囲に磁気センサ1、2、3を間隔Daよりも大きい間隔Dbをもって設ける。回転軸150の回転に伴い可動部13が回転する間、スタンバイ磁石15、17が磁気センサ1、2、3のうちのいずれかの磁気センサの近傍を通過すると、当該磁気センサがスタンバイ状態となり、スタンバイ状態となった磁気センサの近傍をアウトプット磁石16が通過すると、当該磁気センサの磁性素子21において大バルクハウゼン効果が生じ、コイル22から検出信号が出力される。この検出信号に基づいて回転軸150の回転数を計数する。
(もっと読む)
回転部材用物理量測定装置
【課題】回転部材の変位量とこの回転部材に作用する荷重とのうちの少なくとも一方の物理量を測定する為に使用する、エンコーダ1aの被検出面に対向させたセンサの出力信号に基づいて、前記回転部材の回転速度を精度良く測定できる構造を実現すべる。
【解決手段】前記エンコーダ1aの被検出面に設けた各特性変化組み合わせ部3a、3aを構成する1対の透孔11a、11bのうち、一方の透孔11aを前記被検出面の幅方向に形成し、他方の透孔11bをこの幅方向に対して傾斜した方向に形成する。このうちの一方の透孔11a、11aに基づいて発生するパルス間の周期L(L1、L2)に基づいて、前記回転部材の回転速度を測定する。
(もっと読む)
回転センサ
【課題】部品の寸法公差の累積に基づく寸法誤差や組付公差の影響、長年の使用による部品の変形による影響を受けることなく第1の回転体の回転数に対応する第2の回転体の回転角度を正確に検出する。
【解決手段】被測定回転体11に取り付けられこの回転と共に回転する第1の回転体10と、第1の回転体の回転角度を所定の角度範囲ごとに検出する第1の検出手段100と、第1の回転体と機構的に連結しこれと連動して回転し、かつ第1の回転体の回転数よりも減速した回転数で回転する第2の回転体20と、第2の回転体を所定の角度範囲ごとに検出する第2の検出手段200と、を有し、第1の回転体の回転角度を検出するときに、第1の検出手段の出力値が初期値付近の値であるか、終端値付近の値であるかを判断し、第1の検出手段の出力値から第2の検出手段の出力値に判断結果に応じた所定の補正処理を行う。
(もっと読む)
回転角度検出装置
【課題】簡単な構成で多回転の回転角度及びトルク検出ができるとともに、搭載スペース及びコストを低減できる回転角度検出装置を提供する。
【解決手段】第1のメインギヤ1はステアリングシャフト106の入力軸5に、第2のメインギヤ2は出力軸6に嵌合して連結された多回転可能な歯車を持つ回転体であり、トーションバー7は入力軸5と出力軸6の間の同心軸上に配置されている。第1,第2の検出ギヤ3,4はそれぞれメインギヤ1,2の歯車に係合するように設けられた回転体であり、中央部には磁石8,9が配置されている。磁気式角度センサ10,11は検出ギヤ3と検出ギヤ4との間に設けられた基板12上に配置され、対向する磁石8,9の磁界方向を検出し、これらの出力信号に基づいて回転角度演算手段13によって検出ギヤ3,4の多回転の回転角度θm1,θm2が算出され、メインギヤ1,2の多回転の回転角度θmが検出できる。
(もっと読む)
移動体の絶対位置検出装置
【課題】電源遮断後の再復帰時に移動体が再び元の状態から移動するまでの時間を短くしつつ、移動体自体の移動距離を低コストで従来に比べてかなり長くできる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置を特定する絶対値特定パターンが記録されている絶対位置特定スケール11と、移動体の絶対位置を特定しない絶対値不特定パターンが記録されている絶対位置不特定スケール12と、移動体が絶対位置不特定スケールに対応する領域から絶対位置特定スケールに対応する領域に到達したことを検出するガイドパターンが記録されている前記絶対値不特定スケールの少なくとも一部をなすガイドスケール13と、これらのスケールに記録された各パターンを検出する検出器51と、を備えている。
(もっと読む)
磁気式ロータリエンコーダ
多回転検出装置
【課題】 摩耗による寿命低下および異物等の混入による誤検出のいずれも発生することがなく、かつ、保守に要するコストが小さい多回転検出装置を得る。
【解決手段】 回転体に取り付けられた磁石101と、磁石の磁界を検出できる位置に設けられ、検出する磁界の方向が反転する時に電流パルスを出力する磁界反転検出素子102と、電流パルスによる電流を制限する電流制限抵抗103と、上記電流の逆流を防止するダイオード104と、電流パルスによる電荷を蓄積するコンデンサ105と、コンデンサ105に蓄積された電荷量を計測する電荷量計測手段107とを備える。
(もっと読む)
回転センサ
【課題】 回転角度の検出精度を高めながら小型化することができる回転センサを実現する。
【解決手段】 磁気抵抗素子R1〜R8が各磁気抵抗素子の出力信号間に位相差が出るように配置された磁気抵抗素子領域E1と、ホール素子H1,H2が各ホール素子の出力信号間に位相差が出るように配置されたホール素子領域E2とを有し、かつ、磁気抵抗素子領域およびホール素子領域の少なくとも一部同士が重ねられたセンサチップ5と、各ホール素子の各出力レベルと閾値レベルとの比較結果を出す比較部53と、各磁気抵抗素子の各出力信号を用いて相対回転角度θに対応する演算角度φを演算する角度演算部60と、その演算された角度と閾値角度とを比較し、その比較結果と比較部53の比較結果とを用い、相対回転角度に対応する信号を出力する出力部70とを備える。
(もっと読む)
角度センサ
【課題】高精度の角度センサを提供する。
【解決手段】角度センサ11は、螺旋状に巻回する転動溝31を有し、回転軸20の回転に連動して回転するロータ30と、転動溝31を転動する転動体40と、転動体40の位置と回転軸20の回転角とが一対一に対応付けられるように転動体40の移動方向を案内する案内部材60と、転動体40の位置に応じて変化する磁界を検出し、転動体40の位置に応じた検出信号を出力する磁気センサ50と、検出信号に基づいて回転軸20の回転角を演算する信号処理回路80を備える。
(もっと読む)
位置検出装置
【課題】シンプルな構成で小型化が容易な位置検出装置を実現する。
【解決手段】 磁気レゾルバの検出信号をもとにモータの回転位置を検出する位置検出装置において、
前記モータの回転中心軸を中心とした円環状に配置され、それぞれ歯が形成された複数の突極を有するレゾルバステータと、
このレゾルバステータに対向するとともに前記回転中心軸から偏心した円環状に配置されたn個(nは2以上の整数)の歯を有するレゾルバロータと、
前記検出信号の信号振幅および位相に基づいて前記モータの絶対回転位置を算出する演算部と、
を備えたことを特徴とする。
(もっと読む)
1 - 20 / 91
[ Back to top ]