
Fターム[2F103ED01]の内容
Fターム[2F103ED01]の下位に属するFターム
Fターム[2F103ED01]に分類される特許
1 - 20 / 59
変位検出装置、変位検出方法及び変位検出プログラム
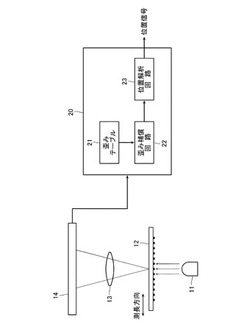
【課題】安価に光学系の歪みをキャンセルしてスケールの位置情報の検出精度を向上させる。
【解決手段】光電式エンコーダは、発光素子11と、スケール12と、レンズ13と、PDA14と、信号処理演算回路20とを備える。信号処理演算回路20は、歪みテーブル21と、歪み補償回路22と、信号解析回路23とを備える。歪みテーブル21は、例えば予めレンズ13等の光学系の設計値から歪みシミュレーションによって得られた歪み情報Δeiに基づき算出されている。歪み補償回路22は、歪みテーブル21を参照すると共に、PDA14の各PD41の位置情報に基づいて、各PD41の位置xiを仮想的にxi−Δeiの位置に配置変更して光学系の歪みを除去し、PDA14からの明暗信号を補正する。位置解析回路23は、この補正された明暗信号に基づいて、スケール12の位置を解析する。
(もっと読む)
光学エンコーダの利得とオフセットを動的に調整する方法

【課題】光学エンコーダの利得とオフセットを動的に調整する。
【解決手段】光学エンコーダにおける利得とオフセットを動的に調整する方法は、回折格子を含むエンコーダ・ディスクを提供する段階と、前記エンコーダ・ディスクに光を照射する段階と、前記回折格子から回折された光を検出しかつ第1の細カウント・チャネルを出力するように構成された検出器を提供する段階と、前記第1の細カウント・チャネルの第1のターゲット利得と第1のターゲット・オフセットを計算する段階と、前記第1のターゲット利得と第1のターゲット・オフセットに基づいて、前記第1の細カウント・チャネルからサンプリングされたデータに補正を適用する段階と、を含む。
(もっと読む)
エンコーダ装置、及び装置
【課題】スケールの位置情報を高精度に検出する。
【解決手段】エンコーダ装置は、照射光を射出する光源部と、少なくとも移動方向に光源部と相対的に移動可能であって、照射光が入射され、移動方向に沿って形成されたパターンを有するスケールと、照射光を変調させる変調信号と、変調信号に応じた参照信号とを生成する変調部と、照射光を受光して、受光した照射光に応じた受光信号を出力する受光部と、参照信号を遅延させて遅延参照信号を生成する遅延信号生成部と、遅延信号生成部によって生成された遅延参照信号と受光信号とに基づいて、移動方向におけるスケールの位置情報を検出する位置検出部と、を備える。
(もっと読む)
光学式エンコーダおよびそれを備えた電子機器
【課題】透過型エンコーダおよび反射型エンコーダとして機能することができる。
【解決手段】 発光素子チップ43および受光素子チップ44を、発光素子形成面および受光素子形成面を基板42に対向させてフリップチップ実装する。基板42は、全体を不透明に構成すると共に、出射光用の第1光透過部42aと入射光用の第2光透過部42bとを有する。基板42のチップ43,44が実装されていない裏面側に、反射型移動体47を配置する。また、基板42のチップ43,44が実装されている表面側に、透過型移動体49を配置する。こうして、発光素子チップ43からの斜め成分光の反射型移動体47による反射光を、受光素子チップ44で受光する一方、発光素子チップ43からの横成分光の透過型移動体49の透過光を、受光素子チップ44で受光することによって、透過型エンコーダおよび反射型エンコーダとして機能させることができる。
(もっと読む)
光学式アブソリュートエンコーダ及び装置
【課題】90度位相差の2つの正弦波信号を内挿演算することによって高分解能で回転位置を検出する光学式エンコーダにおいて、部品を追加することなく容易な手段で光学系の異常を検出することが可能な光学式エンコーダを提供する。
【解決手段】90度位相差の2つの正弦波信号をそれぞれ2乗して加算する2乗和演算器と、信号の異常レベルを記録する異常信号メモリと、信号の異常を判定する異常判定器からなり、前記2乗和演算器で求めた演算結果が、前記異常信号メモリに記録した値より下回った場合に前記異常判定器が異常信号を出力する。
(もっと読む)
エンコーダ
【課題】安定して高調波歪を抑え、位置を高精度に検出することが可能なエンコーダを提供すること
【解決手段】光源12と、受光素子17と、前記光源からの光を反射または透過することによって前記受光素子に導くパターン24Aを含む複数の単位ブロックパターンKAを含むスケール20と、を備えるエンコーダを提供する。複数の単位ブロックパターンは、X方向に沿って、ピッチPの周期で配置されており、パターンは、中心線Xcに関して対称な形状であり、各単位ブロックパターンはY方向に複数の分割領域を含み、パターンの面積比は隣接する二つの分割領域の間で異なり、各分割領域において、前記パターンは、前記測位方向に延びる2つの平行な直線と前記測位方向に垂直な方向に延びる2つの平行な直線によって規定される矩形形状を有する。
(もっと読む)
エンコーダ
【課題】大型化を招かずに広範囲で絶対位置信号を高精度に取得可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターンは、|(m・P1−n・P2)|<|(P1−P2)|を満たすように移動方向であるX方向に垂直なY方向に周期的に配列され、X方向に第1の変調周期P1と第2の変調周期P2を有する。エンコーダの信号処理手段30は、第1の変調周期P1の位相である第1の位相Φ1を取得する第1の位相取得手段32と、第2の変調周期P2の位相である第2の位相Φ2を取得する第2の位相取得手段33と、整数m、nに対し、A/B=n/mの関係を満たす2つの係数A、Bを用いてSv=A・Φ1−B・Φ2を満たすSvを前記スケールの位置を表す位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置
【課題】受光部における誤検出を防止可能なロータリスケールを具備する位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置を提供すること。
【解決手段】被検出物31の位置検出を行う位置検出装置であり、発光部62および受光部64を備え、これらの間に空間部613を備えるフォトセンサ60と、空間部613の間に差し掛かるロータリスケール51と、ロータリスケール51に設けられ、第1透光部53aおよび第1遮光部53bが交互に形成される位置検出パターン53と、ロータリスケール51に設けられ、第2透光部54aおよび第2遮光部54bが交互に形成され、通過する光量が位置検出パターン53を通過する光量よりも少なくなる汚れ検出パターン54と、フォトセンサ60を移動させて、位置検出パターン53の検出状態と汚れ検出パターン54の検出状態とを切り替えるセンサ位置切替機構70と、を具備している。
(もっと読む)
光学式エンコーダ
【課題】検出分解能切り替えにより、位置検出信号生成において未使用となるフォトダイオードが存在する場合に、光源光量の変動を回避する。
【解決手段】
変位を検出するための第1の初段増幅器と、変位を検出するために使用されない受光素子の出力を入力とする第2の初段増幅手段、との和信号出力により光源光量の変動を制御する。
(もっと読む)
原点位置検出回路
【課題】検出部から出力される原点パターンの関与を受けた出力電圧信号のDC成分の変動があっても、確実に原点信号の検出位置の再現性の向上が可能となる。
【解決手段】原点を示す原点パターン112が設けられたスケール110と、スケール110に対して相対変位可能である検出ヘッド120と、を備えるエンコーダ100で、検出ヘッド120の受光部126から出力される原点パターン112の関与を受けた出力電圧信号φZから原点の位置を示す原点信号PZを生成するためのコンパレータ132を有する原点位置検出回路であって、出力電圧信号φZを平滑化するDC電圧検出回路128と、出力電圧信号φZとDC電圧検出回路128から出力されるDC電圧信号Zdcとの差動増幅を行う差動増幅回路130と、を備え、差動増幅回路130の差動増幅信号Zoutがコンパレータ132に入力される。
(もっと読む)
エンコーダ
【課題】スケール上に汚れ等がある場合、およびスケール上のパターンが統合パターンのような場合においても、検出精度の低下を抑制するとともに検出ヘッドをコンパクトに維持でき当該エンコーダが装着される制御機械のエラー止まりを少なくすることが可能となる。
【解決手段】検出ヘッド120は相対変位可能な方向に並ぶ複数の受光アレイ部PDi(i=1〜4)を備え、受光アレイ部PDiから出力される出力信号で検出ヘッド120の位置xを示す位置信号xiがそれぞれ算出され、複数の位置信号xiを合成しスケール110に対する検出ヘッド120の位置xを決定するのに、受光アレイ部PDi毎の位置信号xiに出力信号の大きさに従う重みづけ(信頼性係数Ri)がそれぞれ行われ、重みづけされた位置信号xiの平均が取られる。
(もっと読む)
光学式エンコーダ
【課題】発光素子に過大な電流が流れることを防ぎ、角度変換精度を最大限維持したままエンコーダの長寿命化を図れる光学式エンコーダを提供する。
【解決手段】アナログ原信号を生成する光学回路と、発光素子の駆動電流を制御する光量制御部と、前記アナログ原信号を増幅しアナログ正弦波信号を生成する信号増幅部と、前記アナログ正弦波信号を2相ディジタル正弦波信号に変換するA/D変換部と、前記2相ディジタル正弦波信号を補正して変換用2相正弦波信号を生成する信号補正部と、前記アナログ原信号をディジタルパルス信号に変換するパルス変換部と、前記変換用2相正弦波信号の角度変換値と前記ディジタルパルス信号から位置情報を生成する位置情報生成部とを備え、前記光量制御部は前記発光素子の光量を一定量に維持し、且つ駆動電流が許容電流値を許容電流値で制限すると共に許容電流到達信号を出力し、前記許容電流到達信号で信号補正動作を切替える。
(もっと読む)
光学式エンコーダ
【課題】発光素子に過大な電流が流れることを防ぎ、角度変換精度を最大限維持したままエンコーダの長寿命化を図ることができる光学式エンコーダを提供する。
【解決手段】アナログ原信号を生成する光学回路と、発光素子の駆動電流を制御する光量制御部と、前記アナログ原信号を増幅しアナログ正弦波信号を生成する信号増幅部と、前記アナログ正弦波信号を2相ディジタル正弦波信号に変換するA/D変換部と、前記2相ディジタル正弦波信号を補正して変換用2相正弦波信号を生成する信号補正部と、前記アナログ原信号をディジタルパルス信号に変換するパルス変換部と、前記変換用2相正弦波信号の角度変換値と前記ディジタルパルス信号から位置情報を生成する位置情報生成部とを備え、前記光量制御部は前記発光素子の光量を一定量に維持し、且つ駆動電流が許容電流値を許容電流値で制限すると共に許容電流到達信号を出力し、前記信号増幅部の増幅率を制御する。
(もっと読む)
光学式エンコーダ
【課題】受光素子アレイから出力される信号に異常が生じた場合であっても適切な測定をすることができる光学式エンコーダの提供。
【解決手段】光学式エンコーダは、スケールと、光源と、光源から出射され、スケールを介した光を受光する複数の受光素子アレイ51〜53と、測定手段54とを備える。受光素子アレイ51,53は、それぞれ2つの領域511,512,531,532に分割されている。測定手段54は、領域511,512,531,532から出力される信号に基づいて、領域511,512,531,532に異常が生じているか否かを判定する異常判定部541と、異常判定部541にて異常が生じていないと判定された領域511,512,531,532、及び受光素子アレイ52から出力される信号に基づいて、スケールの位置を測定する位置測定部542とを備える。
(もっと読む)
光学式絶対位置測長型エンコーダ
【課題】アブソリュート(ABS)パターンの検出精度の向上と、スケール上のゴミなどによるノイズの影響の低減を図る。
【解決手段】相対移動可能な検出器とスケール12を備え、検出器側には絶対位置検出用の発光素子11、光学系(レンズ13)及び受光素子(フォトダイオードアレイ14)を配置し、スケール側には所定のアブソリュートパターン32を配置した光学式絶対位置測長型エンコーダにおいて、前記アブソリュートパターン32を、測長方向に分割したり、前記アブソリュートパターンの一部のエッジ位置を測長方向に変更する。
(もっと読む)
計測器及び計測システム
【課題】常にアナログ−デジタル変換部の性能を最大に使い切るように、増幅部が電気信号を増幅するように設定することできる計測器と計測システムを提供する。
【解決手段】受光部11と、増幅部12と、アナログ−デジタル変換部13と、演算部14と、増幅率算出部15とを有し、受光部は、受光する光強度に応じて電気信号を生成し、増幅部は、受光部から電気信号を入力され、外部から設定可能な所定の増幅率に応じて電気信号を増幅し、アナログ−デジタル変換部は、増幅部で増幅されたアナログの電気信号をデジタル信号に変換し、演算部は、デジタル信号を入力され、デジタル信号に対して所定の信号処理を行い、増幅率算出部は、増幅部において設定するべき増幅率をデジタル信号に応じて算出し、増幅率算出部で算出された増幅率が増幅部に入力されて増幅部の増幅率として設定される構成とする。
(もっと読む)
光学式エンコーダ
【課題】小型で高精度な光学式エンコーダを提供する。
【解決手段】光学式エンコーダは、光源と、前記光源に対向配置されたスケールと、前記スケールを介した前記光源からの光束を受光する受光素子と、前記受光素子の出力信号を処理する信号処理回路とを有し、前記光源の発光窓は、複数の点光源の集合体として構成され、以下の式を満たす形状を有する。
【数1】
ただし、Sは積分範囲である発光窓内全域、Po(x1、y1)は発光窓のXY座標(x1、y1)における近視野での発光強度分布を表す関数、pはスケールの格子ピッチ、Nは高調波成分の特定の次数(N:1、2、3、…)、x2は受光素子面上の変位検出方向軸である。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
エンコーダのホーム位置を感知する方法及びシステム
【課題】エンコーダのホーム位置を感知する改良された方法を提供する。
【解決手段】この方法では、エンコーダの1サイクルに対応する正弦波の1サイクルを伴って動くコード装置であって、コード装置に関連付けられた複数のパターンの厚さを、コード装置を通して正弦曲線の方式で変更し、直交エンコーダ読取機を利用してコード装置をモニタし、正弦波の振幅を減少させることによって、ホーム振幅信号を生成する。
(もっと読む)
ロータリエンコーダと角度補正方法
【課題】単一の角度検出器を用いて、目盛盤の目盛中心が回転軸に対して偏心しているときの角度誤差を求めるとともに、その角度誤差を使用して測角値を補正する。
【解決手段】回転軸に固定された目盛盤12と、目盛盤12上のスリット18群の像を撮像するCCDリニアイメージセンサ22と、CCDリニアイメージセンサ22の出力に基づき測角値を演算し、かつ測角値を基に角度誤差量Eを求め、さらに測角値に対して角度誤差量Eを補正することにより高精度に角度を演算する演算器34を備え、角度誤差量Eの算出にあたっては、目盛盤12が等角度ずつ回転する毎に、CCDリニアイメージセンサ22の出力から、目盛盤12の目盛中心O1の像からCCDリニアイメージセンサ22に下ろした垂線26の足Fの座標PFとその座標PFにおける角度Ar、また目盛中心O1の像とCCDリニアイメージセンサ22までの距離Dを複数組求めて、この複数組のデータを基に、角度誤差量Eを演算する。
(もっと読む)
1 - 20 / 59
[ Back to top ]