
Fターム[2F112AD03]の内容
光学的距離測定 (16,745) | その他の光学的距離測定 (821) | 測距対象による反射光強度を測定するもの (70)
Fターム[2F112AD03]に分類される特許
1 - 20 / 70
距離検出装置、距離検出方法、コンピュータプログラムおよびコンピュータ読み取り可能な記録媒体
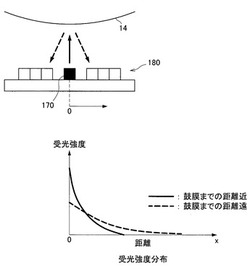
【課題】鼓膜の放射熱を測定する温度計の安全性を高めるため、温度センサと鼓膜との距離をユーザが認識できる距離検出装置を提供する。
【解決手段】本開示に係る距離検出装置は、外耳道内に挿入され、鼓膜に対して光を出射する発光部および鼓膜の光錐で反射された、発光部から出射された光を受光する複数の受光部からなる検出部と、各受光部により検出された光の強度および分布に基づいて、検出部とともに外耳道内に挿入されている対象物から鼓膜までの距離を推定する距離推定部と、を備える。
(もっと読む)
対象物検出装置

【課題】光検出手段としてフォトダイオードやフォトトランジスタを用い、光検出手段と電極間とのインピーダンスから、測定対象物の電気特定及び光特性を同時に測定する対象物検出装置を提供する。
【解決手段】測定対象物20の方向に対して光を照射するLED3aと、照射した光の反射光を受光して電気的な信号に変換するフォトダイオード3bと、フォトダイオード3bに並列に接続し、所定の間隔で離隔配設される1対の電極2a,2bと、フォトダイオード3a及び電極2a,2bに接続する交流電源と、並列に接続されるフォトダイオード3a及び電極2a,2b間のインピーダンスを測定するインピーダンス測定部42と、測定対象物20の電気特性及び光特性に関する情報を予め記憶する対象情報記憶部45と、測定したインピーダンスの値と、記憶されている測定対象物20に関する情報とから、測定対象物20の材質及び/又は接近距離を判別する対象物判別部43とを備える。
(もっと読む)
多方向近接センサー
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
街路樹の枝葉高さ自動測定センサシステム
【課題】本発明は、レーザーセンサを用いて街路樹の枝葉高さを自動で測定を行い、剪定業者の目視による判断で手入れが行われる場合の人為的な誤差の発生を防ぎ、客観的かつ効率的に街路樹の剪定の必要性を判断するシステムに関するものである。
【解決手段】 地上からの高さが一定の位置に固定されたレーザーセンサを用いて街路樹の枝や葉にレーザー光を照射し、反射してくる光の強度から地上からの街路樹の枝や葉の高さが、道路交通法で定められる3.8mの高さ以下に位置する箇所を特定し、街路樹の剪定の必要性を客観的にかつ自動的にセンシングする。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
近接センサ及び電子機器
【課題】従来の近接センサよりも応答性が向上した近接センサ及び電子機器を提供する。
【解決手段】近接センサ1は、電流信号S3の電流値が第2閾値電流以下になったとき、記憶部21に格納されている状態情報を状態ST1に更新し、状態情報が状態ST1であって、かつ、上記電流値が第2閾値電流を越えたとき、状態情報を状態ST2に更新し、上記電流値が第1閾値電流以上になったとき、状態情報を状態ST3に更新し、状態情報が状態ST3であって、かつ、上記電流値が第1閾値電流を下回ったとき、状態情報を状態ST4に更新する状態更新部22と、状態情報が状態ST1または状態ST4に更新されたとき、被検出対象Bが近接していないことを示す信号S6を外部に出力するとともに、状態情報が状態ST2または状態ST3に更新されたとき、被検出対象Bが近接していることを示す信号S6を外部に出力する制御部5とを備える。
(もっと読む)
撮像装置および取得方法
【課題】ストロボによる補助光の発光あり/なしの画像から距離に関する情報を算出する際、被写体の反射率の影響で精度が悪かった。
【解決手段】同じ被写体像に対して補助光を照射した第1の画像と、補助光を照射しない第2の画像と、を取得する。さらに、取得した第1の画像を構成する画像データと、第2の画像を構成する画像データとから、被写体の反射率の影響が除去された外光に関する値を算出する。そして、算出した値と光が距離に応じて減衰する特性を基に、撮像装置から被写体までの距離に関する情報を取得する。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び電子装置
【課題】情報処理装置とユーザとの距離に拘らず、違和感なく情報処理装置を操作できるようにする。
【解決手段】肌領域検出部61は、画像上からユーザの肌を表す肌領域を検出し、特徴点抽出部62は、肌領域の特徴点を抽出し、距離算出部63は、肌領域に基づいて、ユーザまでの距離を算出し、座標変換部46は、距離に応じて、特徴点を所定の座標空間上の座標点に変換するための変換係数を決定し、決定した変換係数に基づいて、特徴点を所定の座標空間上の座標点に変換する。本発明は、例えば、撮像された画像から、ユーザの肌領域を検出する検出装置に適用できる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が存在しない状態でも、光源部における発光強度に対応する強度の光をデフォルト光として受光部に入射させることができ、かかるデフォルト光の受光結果に基づいて、光源部での駆動電流と受光部での受光強度との関係を適正に初期設定することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、光源部12を点灯させた際の受光部30での受光結果に基づいて対象物体Obの位置を検出する。光学ユニット11のハウジング16の前側ハウジング部分163、164には、対象物体Obが存在しない状態でも、受光部30にデフォルト光DLを入射させるデフォルト光生成用反射部166、167が構成されている。従って、デフォルト光DLの受光結果に基づいて、光源部12での駆動電流と受光部30での受光強度との関係を適正に初期設定することができる。
(もっと読む)
1 - 20 / 70
[ Back to top ]