
Fターム[2F112CA05]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されているもの (958) | 自動車、車両 (415)
Fターム[2F112CA05]に分類される特許
141 - 160 / 415
光測距装置
【課題】測定値のばらつきによる影響を抑制し、測定精度を高めることが可能な光測距装置を提供する。
【解決手段】障害物センサ31は、2つの異なる周波数の変調光を交互に出射するように投光素子36を制御する出力制御部41と、受光素子37において受光された変調光に基づいて被投射体Tまでの測定距離を演算する距離演算部42と、2回の第1周波数の変調光によって演算された測定距離の差が、第1所定範囲内にあるかを判定する第1判定部43と、2回の第2周波数の変調光によって演算された測定距離の差が、第2所定範囲内にあるかを判定する第2判定部44と、第1判定部43と第2判定部44との判定結果に基づいて距離演算部42によって演算された測定距離の正誤を判定する総合判定部46とを備えている。
(もっと読む)
撮像装置、測距装置及び視差算出方法

【課題】微小な視差を高精度に算出するとともに、視差演算のための回路規模の増大を抑制することができる撮像装置などを提供する。
【解決手段】基準撮像系及び参照撮像系により生成された基準画像及び参照画像において、光軸位置をそれぞれ取得し、基準撮像系が有するレンズの光軸中心に近づく向きへ、参照画像の光軸位置から所定画素数移動した位置と、基準画像の光軸位置とが、同一の座標値となるように基準画像及び参照画像の平面座標を設定する画像切出部141と、設定された座標に基づいて、基準画像の一部領域と参照画像の一部領域との画像の評価値を算出し、算出された評価値から仮視差を算出する視差演算部142と、算出された仮視差から所定画素数を減算した視差を算出する視差補正部143とを備える。
(もっと読む)
可視光通信を利用した位置測定装置、位置測定システム、及び位置測定方法
【課題】可視光通信と画像処理とを利用した位置測定システムを容易に実用化することが可能な位置測定装置を提供することにある。
【解決手段】可視光通信と画像処理とを利用した位置測定システムにおいて、車両は2個の画像センサ19A,19B及び車載位置測定装置10を搭載している。画像センサ19A,19Bは、可視光通信ビーコンの位置からの距離を測定するための画像処理を行なうための画像入力部及び可視光通信ビーコンの受信部とを兼ねている。車載位置測定装置10は、画像センサ19A,19Bからの入力に基づいて、走行する車両の位置を測定する。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
複眼画像入力装置及びそれを用いた距離測定装置
【課題】複眼による視差を利用して、物体との距離を測定するための複眼画像入力装置において、距離の測定分解能の確保と装置の小型化を両立させる。
【解決手段】複眼画像入力装置を、光軸と略垂直な面内に設置された2個以上のレンズブロック3a,4aと、前記各レンズブロックによる像を複眼画像として撮像するための単一の撮像手段6と、前記各レンズブロックによる前記撮像手段に導くミラープリズム3a,3bやミラープリズム4a,4bからなる導光手段3,4とで構成する。
(もっと読む)
距離算出装置および算出プログラム
【課題】移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。
【解決手段】算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。
(もっと読む)
対象物検出システム
【課題】遠赤外線を用いて撮像された画像から、検出対象物を確実に検出することができるようにする。
【解決手段】自車両から放射された遠赤外線が、先行車両に取り付けられた再帰反射型リフレクター12によって再帰反射されて、撮像装置22に入射する。そして、遠赤外線に感度を有する撮像装置22によって、再帰反射型リフレクター12を含む領域を撮像する。撮像出力装置は、撮像装置22によって生成された熱画像から、輝度値が所定値以上となる高輝度領域を抽出すると共に、高輝度領域から再帰反射型リフレクター12を表わす領域を検出し、熱画像及び検出結果をドライバに対して表示する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像ごとにオブジェクトを検出し、オブジェクトの輝度に基づいて、前記オブジェクトまでの距離を表す距離画像データを生成する画像処理部10を備えた。
(もっと読む)
対応点探索装置
【課題】処理コストを増大させなくても精度良く対応点を探索し、かつ、大きな処理対象外の領域が発生することを防止する。
【解決手段】信頼度算出部50は、探索部30により探索された各対応点の探索結果を基に、各対応点の探索精度を示す信頼度を算出する。変更部60は、信頼度が所定の値よりも低い対応点を、参照画像上の別の点に変更する。決定部70は、探索部30により探索された対応点、又は変更部60により変更された対応点を基に、注目上階層の参照画像における初期探索点を決定する。探索制御部40は、決定部70により決定された初期探索点を基準として、注目階層の1つ上の階層の参照画像における探索範囲を設定し、探索範囲内において探索部30に探索処理を実行させ、当該探索処理が下位の階層から上位の階層に向けて実行されるように探索部30を制御する。
(もっと読む)
パラメータ計算装置、パラメータ計算システムおよびプログラム
【課題】車両に搭載された撮影装置を精度高く校正する。
【解決手段】車両に搭載された2台のカメラで同時に撮影された撮影画像を取り込み(100)、一方のカメラで撮影された撮影画像から特徴点を検出し(102)、他方のカメラで撮影された撮影画像から特徴点に対応する対応点を検出し(104)、該特徴点および対応点に基づいて2台のカメラの位置及び姿勢を示す外部パラメータを仮計算し(106)、特徴点、対応点、および仮計算された外部パラメータに基づいて、各特徴点の位置から一方のカメラまでの各々の距離を算出し(108)、該算出された距離に基づいて、所定の距離の領域に分布する特徴点の数が所定数を越えているか否かを判定し(110、112)、上記領域に分布する特徴点の数が所定数を越えていると判定した場合に、該領域に存在する特徴点と該領域に存在する特徴点に対応する対応点に基づいて外部パラメータを再計算する(114)。
(もっと読む)
車両周辺監視装置
【課題】対象物が動いている場合でもこの対象物の位置を高精度で測定することができる装置を提供する。
【解決手段】車両周辺監視装置10によれば、指定期間ΔTだけ離れている2つの時刻の間での対象物領域のサイズの変化率Rate(t)が算出される。指定期間ΔTは対象物が同一であることが確認されうる程度に画像における対象物の形状または姿勢が類似するまたは一致するように定められた時間である。このため、画像における対象物の姿勢または形状が指定期間ΔTまたはその近傍範囲の時間を周期として変化するように動いている同一対象物のサイズの変化率Rate(t)が高精度で算出される。そして、対象物領域の指定期間ΔTにわたるサイズの変化率Rate(t)を基礎とすることにより、対象物が動いている場合でも車両1から対象物までの距離または位置が高精度で測定されうる
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
撮像装置
【課題】撮像装置において、簡易な構成で、好適に被写体までの距離を測定可能とする。
【解決手段】撮像装置は、複数のレンズ(100)と、複数のレンズの各々を介して、同一の被写体(500)を複数の像(550)として撮像する撮像素子(210)と、撮像素子により同時に若しくは並行して撮像される複数の像のうち二つの像に係る又は撮像素子により時間的に相前後して撮像される複数の像のうち一つの像に係る、二つの結像位置の相互間に、視差量を付与する視差量付与手段(310,320)と、二つの結像位置の相違に基づいて、撮像素子及び被写体間の距離を算出する距離算出手段とを備える。
(もっと読む)
物体検出装置
【課題】検出性能の低下を的確に判定する。
【解決手段】物体検出ECU11は、ミリ波レーダ21を介して、車両の前方に設定された第1領域R1内の物体を検出する第1検出部111と、CCDカメラ22,23を介して、車両の前方の、第1領域R1の少なくとも一部の領域を含む第2領域R2内の物体を検出する第2検出部112と、第1領域R1及び第2領域R2に含まれる領域である第3領域R3内に含まれる少なくとも1の物体が第2検出部112によって検出されているか否かを判定する検出判定部113と、検出されていると判定された場合に、第2検出部112によって検出されている第3領域内の物体の内、少なくとも1の物体が第1検出部111によって検出されていない場合に、ミリ波レーダ21又は第1検出部111の検出性能が低下していると判定する性能判定部115と、を備える。
(もっと読む)
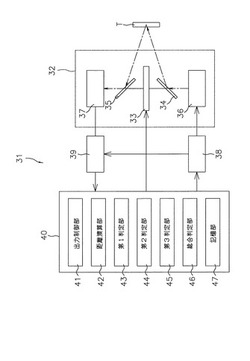
三次元測距装置
【課題】180度以上の走査角度を確保しながらも、小型で高精度な三次元測距装置を提供する。
【解決手段】水平面に対して傾斜配置された偏向ミラー9を垂直な軸心P1周りに回転する走査機構と、軸心周りに配置され軸心に対して所定角度θ傾斜した光軸L1に沿って測定光を出射する投光部3と、投光部から出射され偏向ミラーで偏向反射された測定光に対する反射光を集光する集光光学系6と、集光された反射光を検出する単一の受光部5と、軸心P1の周方向に沿って互いに異なる位置から異なるタイミングで一つの測定光が出射されるように投光部を駆動する駆動制御部と、走査機構により投光部から測定対象空間に向けて走査された測定光に対する反射光の遅延時間から被測定物までの距離を算出するとともに、走査機構から出射される測定光の走査角度から前記被測定物の角度を算出する距離算出部を備えている。
(もっと読む)
変位量検出方法及びそれに用いる装置
【課題】温度環境が変動しても高精度に測定できる変位量検出方法及び装置を提供する。
【解決手段】変位量検出手段によりワークの変位量を検出する方法において、非加熱状態で該変位量検出手段を作動させた後、該変位量検出手段の検出部の温度が所定温度に達するまでに、該ワークの見かけの変位量を検出すると共に、該検出部の温度を検知する動作を複数回行い、該見かけの変位量及び該検出部の温度から、温度変化に伴うワークの見かけの変位量の変化率を算出し、該温度が所定の温度に達した後、ワークの変位量を検出すると共に、該検出部の温度を検知し、該見かけの変位量の変化率から得た補正値を該ワークの該変位量から減算して補正した変位量を出力することを特徴とする。また、変位量検出手段によりワークの変位量を検出する変位量検出装置において、温度検知手段と、記憶手段と、変化率算出手段と、補正変位量出力手段とを備える。
(もっと読む)
検出装置
【課題】簡素で、外乱を受けにくく、可能な限り長寿命を確保できる構造を採用し、広い角度範囲(最大360度まで)に渡って監視領域の物体を確実に検出できる検出装置を提供する。
【解決手段】監視領域11の物体を位置分解的に検出する検出装置は、送信領域19に電磁波を出射する送信装置15と、受信領域23から反射された電磁波を受信する受信装置21とを備え、前記送信領域19及び受信領域23は前記監視領域11において一定の検出角度をカバーする検出領域27の内部で互いに重畳又は交差し、該検出領域27で出射波17が前記物体により反射され、更に、前記出射波17の伝播経路及び/又は反射波25の伝播経路に設置され、どの時点においても前記検出領域27全体を送信側及び/又は受信側でカバーする結像系29と、前記反射波25をその反射位置に関して識別するための位置分解手段31とを備える。
(もっと読む)
障害物検出装置
【課題】車載用の障害物検出装置において、路車間通信や車車間通信により得られる情報を利用して、障害物との相対的な位置関係を表す情報の検出精度を向上させる。
【解決手段】撮像画像上で先行車両に対応する領域の幅(車幅に対応)Lsと、先行車両から取得した車両情報に含まれる先行車両の車幅Ltと、撮像画像の供給元である前方カメラの焦点距離fとから、次式を用いて、自車両と先行車両との距離Dを求める。
【数1】 (もっと読む)
(もっと読む)
141 - 160 / 415
[ Back to top ]