
Fターム[2F112CA13]の内容
光学的距離測定 (16,745) | 対象、用途 (2,011) | 具体的に適用対象が特定されていないもの (1,021) | 変位の検出 (108)
Fターム[2F112CA13]に分類される特許
1 - 20 / 108
対象物識別装置および対象物識別方法
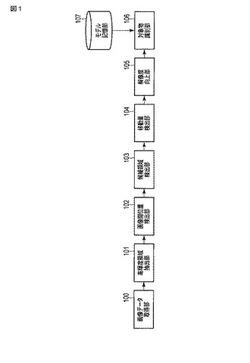
【課題】画像データからより確実に移動対象物を検出し識別する。
【解決手段】画像データ取得部(100)にて対象物を撮影した画像データを規定のレートで順次取得し、画素間位置検出部(102)にて順次取得される複数の画像データ間の相対位置を検出し、候補領域抽出部(103)にて前記相対位置から前記複数の画像データ間の差分を検出しその差分を前記対象物の候補領域として1つもしくは複数抽出し、移動量検出部(104)にて前記複数の画像データにわたって前記候補領域の移動量を検出し、解像度向上部(105)にて前記移動量を基に前記候補領域の解像度を向上させる。一方、予め対象物のモデルパターンをモデル記憶部(107)に記憶しておき、対象物識別部(106)にて、解像度を向上させた候補領域と記憶されたモデルパターンとを比較して対象物を識別する。
(もっと読む)
変位測定方法および変位測定装置

【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
変位センサ
【課題】被測定物の表面の反射の状態によって、変位センサの測定方式を切り換えたり、変位センサを交換したりすることを不要にする。
【解決手段】拡散反射板212は、レーザ光源231から出射され、ワーク102の加工面で正反射されたプローブ光が入射する位置に配置されている。リニアセンサ233は、拡散反射板212により拡散反射されたプローブ光がさらにワーク102の加工面で反射された第1の反射光、レーザ光源231から出射されたプローブ光がワーク102の加工面で拡散反射された第2の反射光を受光する。信号処理部234は、第1の反射光によりプローブ光がワーク102の加工面を介して拡散反射板212に入射するまでの第1の距離を検出するか、または、第2の反射光によりプローブ光がワーク102の加工面に入射するまでの第2の距離を検出する。
(もっと読む)
光学式センサ
【課題】ノイズ光の入射により検出対象物が検出対象位置にあると判断され得る受光状態になった場合でも、誤検出が生じるのを防止する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、検出部として機能するCPU10とを具備するセンサ1のCPU1に、受光部102の受光状態に基づき、検出対象物とセンサ1との間の距離があらかじめ定めた基準距離に適合するか否かを判別する第1の判別手段と、受光量を表すパラメータまたは受光量の増減に応じて調整される感度パラメータの変化の度合いがあらかじめ定めた許容範囲に入るか否かを判別する第2の判別手段との機能を付与する。各判別手段により物体との距離が基準距離に適合し、パラメータの変化の度合いが許容範囲に入ると判別されたとき、センサ1からは物体を検出したことを示す検出信号が出力される。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
合焦位置を決定する方法及びビジョン検査システム
【課題】試料位置と合焦位置との間の差分を求める方法を提供する。
【解決手段】試料を示す画像データを獲得するステップと、獲得データから特徴セットを抽出するステップと、画像データ特徴を位置差分値に関連付けるように教え込まれた機械学習アルゴリズムを用いることにより、特徴セットを位置差分値に分類するステップとを含み、位置差分値が差分に対応する。任意に、特徴セットは対比特徴のサブセットを含みうる。任意に、対比特徴のサブセットは、画像データに基づく二乗勾配関数、画像データに基づくウェーブレット関数及び画像データに基づく自己相関関数、例えば、VollathのF4関数若しくはVollathのF4関数とVollathのF5関数との組合せ、全画像データの分散及び並びにLaplaceベースの焦点測定からなる群より選択されうる。
(もっと読む)
レーザ変位計
【課題】簡易な構成で距離を測定可能なレーザ変位計を提供する。
【解決手段】レーザ光を出射する光源部11、出射光の光束径を拡張し、拡張後の出射光が反射手段30で反射された反射光を集光する光束径変更部14、反射光を受光する受光部16、出射光と反射光を用い、反射手段30までの距離を算出する算出部18、その距離の変位を検出する変位検出部21、検出された変位に関する出力を行う変位出力部22、拡張前の出射光と、光束径変更部14からの反射光との一方を透過させ、他方を反射させることによって、光源部11からの出射光を、中心領域を介して光束径変更部14に透過または反射させ、光束径変更部14からの反射光を、中心領域の外側の領域である外側領域を介して受光部16に反射または透過させる反射部17aを備え、光束径変更部14は、反射光に対する有効口径が出射光の光束径より大きい。
(もっと読む)
奥行計測装置
【課題】複数の奥行計測装置が近傍で動作している場合、近傍の奥行計測装置が発光する平面パターンが妨害して平面パターンの認識ができず奥行計算ができない場合があった。
【解決手段】平面パターンの発光を間欠的にして、ほぼ発光期間のみを露光期間とすることにより、近傍の奥行計測装置が発光する期間に露光する確率を減らす。
これにより平面パターンが認識できなくなる確率が減じる。また、平面パターンが認識できないことを検出して発光のタイミングを変える。
(もっと読む)
変位センサ
【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
変位検出装置
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
共焦点計測装置
【課題】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置であって、光の波長による、計測対象物の変位を計測する精度の変動を抑えた共焦点計測装置を提供する。
【解決手段】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置である。共焦点計測装置100は、白色LED21と、白色LED21から出射する光に、光軸方向に沿って色収差を生じさせる回折レンズ1と、回折レンズ1より計測対象物200側に配置され、回折レンズ1で色収差を生じさせた光を計測対象物200に集光する対物レンズ2と、対物レンズ2で集光した光のうち、計測対象物200において合焦する光を通過させるピンホールと、ピンホールを通過した光の波長を測定する波長測定部とを備えている。回折レンズ1の焦点距離は、回折レンズ1から対物レンズ2までの距離と、対物レンズ2の焦点距離との差より大きい。
(もっと読む)
共焦点変位センサ
【課題】より簡単かつ安価に振動部を作製することが可能な共焦点変位センサを得る。
【解決手段】共焦点変位センサにおける振動部40は、固定体46と、一端41A側の側面41Sが固定体46に固着され、他端41B側に設けられた第1レンズ31を光軸に沿うように往復移動させる第1振動子41と、一端42A側の側面42Sが固定体46に固着される第2振動子42と、を含み、固定体46、第1振動子41、および第2振動子42は、平板状の部材からそれぞれ形成される。
(もっと読む)
変位センサ
【課題】分解能を維持しつつ広い計測レンジで変位を測定することが可能な変位センサを提供する。
【解決手段】センサヘッド100は、レーザダイオード1と、フォトダイオード2と、偏光ビームスプリッタ(PBS)3と、レンズ4〜6と、ピンホール7aが形成された絞り板7と、アーム8a,8bを有する音叉状の振動子8と、振動子8のアーム8aに取り付けられたレンズ9(コリメートレンズ)と、振動子8のアーム8bに取り付けられたレンズ10(対物レンズ)とを備える。レンズ9の焦点距離は、レンズ10の焦点距離の2倍以下、好ましくは1倍と定められる。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
画像測定装置
【課題】高精度かつ高速なオートフォーカス処理を可能にする。
【解決手段】画像測定装置は、ワークを撮像するフレームレートが可変の撮像装置と、前記ワークに対して光を照射する照明装置と、前記撮像装置の合焦位置を制御して前記合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、前記位置制御システムによる合焦位置の制御に際して前記撮像装置のフレームレートを制御すると共に、前記撮像装置のフレームレートに応じて前記照明装置の光量を調整する制御装置とを備える。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
移動体位置推定装置及び移動体位置推定方法
【課題】異なる場所から検出した特徴点の見え方が各検出場所で変化する場合であっても、移動体の位置を推定することが可能な、移動体位置推定装置及び移動体位置推定方法を提供する。
【解決手段】撮像部2が撮像する周囲画像の撮像範囲内へ投光した線状光が屈曲している部分である折曲部において折曲部平面から予め設定した角度で立ち上がる立ち上がり線を算出する立ち上がり線算出部16と、撮像部2が撮像する周囲画像の撮像範囲の変化に応じて、立ち上がり線算出部16が算出した立ち上がり線と、撮像部2から特徴点までの距離に基づいて、撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部とを照合する特徴点照合部20と、特徴点照合部20が照合した撮像範囲が変化する前の折曲部と撮像範囲が変化した後の折曲部との位置の変位量に基づいて、車両Vの位置を推定する移動体位置推定部22を備える。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
1 - 20 / 108
[ Back to top ]