
Fターム[2F112DA02]の内容
Fターム[2F112DA02]に分類される特許
1 - 20 / 132
画像解析装置及びこれを用いた物体検出装置
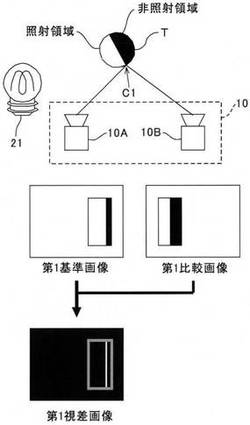
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
車軸検出装置

【課題】小型でありつつも、車軸の検出距離範囲が広範囲である非接触型の車軸検出装置を提供すること。
【解決手段】車両の進行方向と交差する方向から路面(20)を撮像する第1および第2のステレオ画像取得手段(11,12)にて撮像したステレオ画像の視差情報に基づいて前記車両の車軸を検出する車軸検出手段を備えた車軸検出装置(10)であって、第1のステレオ画像取得手段(11)は、第1の焦点距離を持つ少なくとも2台以上のカメラから構成され、第2のステレオ画像取得手段(12)は、第1の焦点距離よりも短い第2の焦点距離を持つ少なくとも2台以上のカメラから構成され、第2のステレオ画像取得手段(12)を構成するカメラの少なくとも1台が、高さ方向において第1のステレオ画像取得手段(11)を構成するカメラの間に配置される構成とする。
(もっと読む)
距離計測装置
【課題】発光素子の温度変化に対する計測精度の変化を抑制する。
【解決手段】投光手段1は、対象空間に投光する発光素子11を備え、受光手段2は、対象空間からの光を受光する受光素子21を備える。制御手段3は、投光手段1に変調信号を与えて発光素子11から時間経過に伴って強度が変化する変調光を投光させ、変調信号に同期する復調信号を受光手段2に与えて受光素子21の出力から変調光の成分を抽出する。演算手段4は、投光手段1から対象空間に投光された変調光が受光手段2に受光されるまでの時間を計測することにより、対象空間に存在する物体までの距離を算出する。温度測定手段6は、発光素子11の温度を計測し、精度維持手段7は、温度測定手段6が計測した温度が高いほど発光素子11の駆動電流を大きくし、発光素子11の温度変化に対して受光素子21に入射する変調光の変化を抑制する。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
多方向近接センサー
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
センサー装置、安全装置、ドア、および移動監視方法
【課題】監視範囲内に位置する物体と、ガイドで案内される移動可能な移動要素との好ましくない衝突に関し、移動要素を監視するセンサー装置を提供する。
【解決手段】物体4を感知する少なくとも2つのセンサー5を有し、これらセンサーが、電磁波6を放射する送信器と、電磁波6を受信する受信器とを備え、これらセンサーが、当該センサーをガイド3aと平行に取り付け可能に、互いに隣接して配置され、これらセンサーが、また、当該センサーから放射された電磁波6が監視範囲を貫通するように配向されている、センサー装置1とする。また、障害物4の認識を向上できるように、これらセンサーには、物体4からの距離を測定する距離センサーを用いる。さらに、安全装置、ドア2、および、移動を監視する方法も提案する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
形状計測装置
【課題】計測対象物体の形状を高速かつ高精度に計測する装置を提供する。
【解決手段】計測対象物体21の形状を計測する装置であって、光源用基板32と、該光源用基板32上に配置された複数の格子投影用LED33とを有する格子投影用光源31と、1次元格子が描かれた格子面を含む、光源用基板32に平行に配置された格子プレート34とを有する格子投影部30と、1次元格子が投影された計測対象物体21を撮影する撮影部11と、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求める解析制御装置12とを備え、複数の格子投影用LED32の各々の光軸が、光源用基板32の法線に対して、計測対象物体21側に傾斜していることを特徴とする。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
1 - 20 / 132
[ Back to top ]