
Fターム[2F112DA28]の内容
Fターム[2F112DA28]に分類される特許
161 - 180 / 471
距離測定装置および距離測定方法
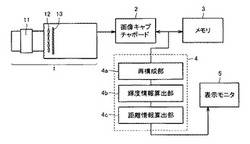
【課題】奥行き分解能の高い距離測定装置あるいは距離測定方法を提供する。
【解決手段】本発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成画像を生成する再構成部4aと、複数の再構成画像の各々を複数の領域に分割し、各領域について、領域に含まれる画素の輝度の大きさを代表する第1の代表値を算出し、第1の代表値に基づいて画素群内の輝度分布の偏りの大きさを表わす第2の代表値を算出する輝度情報算出部4bと、第2の代表値に基づいて対象物までの距離を算出する距離情報算出部4cとからなる。
(もっと読む)
3D撮像システム
目的物表面の三次元モデルを計算する装置・方法を開示する。少なくとも一の指向性エネルギ源が目的物を指向的に照射する。相互に相対して固定位置で少なくとも二の空間的に離れたビューポイントを有する撮像アセンブリは目的物がエネルギ源で照射されると個々のビューポイントにおける目的物の一連の画像を記録する。所定形状フィーチャを有する少なくとも一のテンプレートは目的物と同時にビューポイントに対し可視である。ビューポイントにて記録された画像は分析され一連の画像内の個々の画像に対してテンプレートに相対する個々のビューポイントの位置及びポーズを判別する。目的物に対する測光データはビューポイントの計算された位置及びポーズと画像データを用いて生成される。目的物の初期の三次元モデルを含む形状データは光学三角測量を用いてステレオスコープ復元を実行して生成される。形状及び測光データは組み合わされ三次元モデルを構築する。 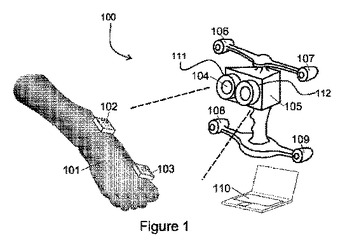 (もっと読む)
(もっと読む)
障害物検出装置

【課題】車載用の障害物検出装置において、路車間通信や車車間通信により得られる情報を利用して、障害物との相対的な位置関係を表す情報の検出精度を向上させる。
【解決手段】撮像画像上で先行車両に対応する領域の幅(車幅に対応)Lsと、先行車両から取得した車両情報に含まれる先行車両の車幅Ltと、撮像画像の供給元である前方カメラの焦点距離fとから、次式を用いて、自車両と先行車両との距離Dを求める。
【数1】 (もっと読む)
(もっと読む)
測定装置および方法、撮像装置、並びに、プログラム
【課題】簡単な構成により撮像装置と人との間の距離を確実に測定する。
【解決手段】赤目判定部122は、照明部112の光源から発せられた照明光が照射された人を撮像部111により撮像した画像内の人の目における赤目現象の発生の有無を判定する。照明制御部123は、照明部112の光源の点灯を制御する。距離測定部124は、赤目判定部122による判定結果、および、撮像部111の光軸と照明部112の光源との間の距離に基づいて、撮像部111と人との間の距離を求める。本発明は、例えば、撮像装置に適用できる。
(もっと読む)
距離測定装置
【課題】フォーカス位置をずらせて撮像された複数の被写体画像に基づいて被写体との間の距離を測定する距離測定装置において、装置の構成を簡単にし、しかも、固体撮像素子の制御を簡単にする。
【解決手段】複数のマイクロレンズ51a〜51cを用いて複数の個眼像をフォーカス位置をずらせて撮像する複眼カメラ部を備え、エリアセンサ6(固体撮像素子)と各マイクロレンズ51a〜51cとの間の光学距離を異ならせた。これにより、1つのエリアセンサ6と、焦点距離の同じ複数のマイクロレンズを用いて、いわゆるコントラスト方式等の距離測定装置に必要な、フォーカス位置をずらせて撮像された複数の被写体画像(多重フォーカス画像群)を得ることができるので、装置の構成を簡単にし、しかも、エリアセンサの制御を簡単にすることができる。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】 簡単な設定で、単眼カメラの画像から、精度の高いオブジェクトの推定を可能にした、画像処理装置を提供する。
【解決手段】 オブジェクト位置・サイズ推定処理部153は、変化領域抽出処理部151が抽出した矩形領域(追跡開始(新規)オブジェクト、および追跡オブジェクト)について、オブジェクトモデルテーブル算出部154が算出した参照テーブル(実距離Yテーブル、実距離Xテーブル、実距離Zテーブル)を用いて、オブジェクト位置およびサイズの推定と、これに伴う各種のオブジェクト処理を行う。
(もっと読む)
照明装置および検出装置を有するセンサシステム
【課題】検出装置および照明装置を有するセンサシステムを提供して、このセンサシステムが殊に多方面に使用できるようにすること。
【解決手段】照明装置(1,3)と検出装置(D)とを有するセンサシステム(S)において、この照明装置を構成して、第1波長のレーザビーム(L11,L12)と、第1波長とは異なる第2波長のレーザビーム(L21,L22)を放射するようにし、また上記の検出装置を構成して、第1波長および第2波長の電磁ビームが検出されるようにする。
(もっと読む)
複眼撮像装置
【課題】複眼撮像装置において、狭いスペースに容易に進入させることができ、模様のない一様な表面を有する被写体であっても容易に正確な3次元形状を取得する。
【解決手段】複眼撮像装置1は、人の口腔内に進入可能な小型に形成された撮像装置本体2と、撮像した画像の画像処理装置3とを備える。撮像装置本体2は、複数の光学レンズL11、L12・・L33が同一平面上に配置されてなる光学レンズアレイ6と、個眼像k11、k12・・k33を撮像する固体撮像素子7と、光学レンズアレイ6上に接着された回折光学素子8と、回折光学素子8へレーザ光9を出射するレーザ光源装置10とを備える。回折光学素子8は、表面に形成された微小な凹凸により入射されたレーザ光9を反射し、被写体の表面に多数の輝点(パターン像)を格子状に映し出す。画像処理装置3は撮像された各輝点毎に撮像装置本体2と輝点との距離を算出し、被写体の3次元形状を推定する。
(もっと読む)
距離画像センサの校正装置及び校正方法
【課題】簡単なシステム構成により、移動体に取り付けられた距離画像センサを、当該移動体に取り付けられた状態で校正することのできる校正装置及び校正方法を提供する。
【解決手段】第1平面と第1平面とは異なる第2平面とを有して構成される校正指標は、姿勢情報及び移動体との位置情報が特定された状態で距離画像センサ20の検出範囲内に設置される。平面特定部3は、校正指標が含まれる距離画像データである校正対象データに基づいて、第1平面及び第2平面のそれぞれの平面を特定する。法線ベクトル演算部4は、第1平面及び第2平面のそれぞれの法線ベクトルを演算する。回転量演算部5は、校正指標の姿勢情報と法線ベクトルとに基づいて、三次元基準座標系における距離画像センサ20の回転量を演算する。
(もっと読む)
光検出装置及び光検出方法
【課題】投光した光の情報の検出精度を向上させる。
【解決手段】光を投光する投光装置1と、投光する光の変調周波数を算出する変調周波数算出部32と、投光手装置1から投光された光を撮像する撮像装置2と、変調周波数算出部32により算出された変調周波数に基づいて、光の情報の検出に影響を及ぼす周波数を算出する周波数算出部33と、撮像装置2により撮像された撮像情報から周波数算出部33により算出された周波数の情報を除去し、撮像情報に含まれる光の情報を検出する同期検波処理部37とを備える。
有する車載警報装置。
(もっと読む)
裏面照射型撮像素子及び距離測定装置
【課題】距離算出時間を短縮することが可能な裏面照射型撮像素子を提供
【解決手段】一定周期で強度変調された照射光による対象物8からの反射光をp基板24の裏面側から受光し、反射光に応じてp基板24内の複数の光電変換部で発生して蓄積された電荷をp基板24の表面側から読み出して撮像を行う裏面照射型撮像素子であって、1つの光電変換部に対応して4つ設けられ、対応する光電変換部で発生して蓄積された電荷を一時的に蓄積するための電荷蓄積部15a〜15dと、p基板24の表面上方に設けられ、1つの光電変換部に対応する電荷蓄積部15a〜15dの各々に、該光電変換部に蓄積される電荷のうち反射光の該各々に対応する位相における光に応じた電荷を蓄積させる制御を行う電極20と、p基板24の表面上方に設けられ裏面照射型撮像素子が形成されたチップとは別のチップと電荷蓄積部15a〜15dとを接続するためのチップ間接続用電極21とを備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離の測定対象となる対象物の大きさに関わらず、対象物までの距離を安定して算出する。
【解決手段】抽出部20は、基準カメラ110から順次入力される入力画像を基準画像、参照カメラ120から順次入力される入力画像を参照画像とし、各基準画像から前方車体が撮影されている領域である物体領域を抽出する。面積算出部30は、抽出部20により抽出された物体領域の面積を算出する。処理変更部40は、面積算出部30により算出された物体領域の面積が小さくなるにつれて、視差分解能を高くする探索処理を選択する。対応点探索部50は、抽出部20により抽出された物体領域内に注目点を順次設定し、処理変更部40により選択された探索処理を用いて、各注目点の対応点を、注目点を設定した基準画像と同一時刻に取得された参照画像から探索する。
(もっと読む)
測距用画像選択機能を有する測距装置
【課題】赤外線光量の小さい環境や、赤外線の反射率の低い対象物の場合、赤外線ステレオカメラによる測距はテクスチャ情報が少ないため測距精度が低くなる。この場合、可視光量は多く、可視光線の反射率は高い対象物であれば、可視光ステレオカメラを用いることでテクスチャ情報が増加し、精度の高い測距が可能になる。一方、赤外線光量が多く、赤外線の反射率の高い対象物であり、可視光量は少なく、可視光線の反射率は低い対象物であれば上記と逆の状況になる。
【解決手段】赤外線ステレオカメラ(3)と可視光ステレオカメラ(5)とを両方具備し、周辺の光量もしくは相関演算の一致度評価値に応じて上記2つのカメラを切替えることにより、周辺光量の変化による測距精度のばらつきが低減される。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
車外監視装置
【課題】車外環境に応じて適切な距離データの算出感度を設定し、車外の監視精度を向上することができる車外監視装置を提供する。
【解決手段】ステレオ画像の基準画像から抽出した画素ブロックの輝度特性と相関を有する画素ブロックを比較画像中から特定することにより各画素ブロック毎の視差を算出するとともに、視差が算出された画素ブロックの中から距離データ算出対象となる画素ブロックを抽出し、抽出した画素ブロックに関する視差を距離データとして算出することによって車外監視を行うステレオ画像認識装置2において、輝度判定閾値設定部22を設け、各画素ブロックに対して算出された距離データの距離分布に基づいて輝度判定閾値DCDXthを可変設定することで、距離データ算出対象となる画素ブロックの抽出感度を制御することにより、車外の監視制度を向上することができる。
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
情報取得装置、情報取得方法および情報取得プログラム
【課題】対象物の分光画像と距離画像を同時に取得する。
【解決手段】少なくとも3チャンネルの分光感度を有し、撮像対象物の画像データを取得する第1の撮像手段と、少なくとも3チャンネルの分光感度を有し、該3チャンネルの分光感度のうちの1チャンネルが第1の撮像手段が有する分光感度のうちの1チャンネルと同一の分光感度であり、他のチャンネルの分光感度が第1の撮像手段が有する分光感度と異なる分光感度を有し、撮像対象物の画像データを取得する第2の撮像手段と、分光感度が同一のチャンネルである第1の撮像手段による画像データと、第2の撮像手段による画像データとを用いて、距離画像情報を生成する距離画像生成手段と、第1の撮像手段と第2の撮像手段のそれぞれが有する各チャンネルの画像データから分光画像情報を生成する分光画像情報生成手段とを備えた。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】鏡面反射の有無を判定し、鏡面反射をした位置までの距離を求める。
【解決手段】投光装置1から被検物に計測光PL1,PL2を照射し、被検物によって反射される反射光LB1,LB2を複数の画素を持つ撮像装置2によって受光する。計測光PL1,PL2の投光角度α3,α15の情報と、その反射光を受光する画素の情報とから、その反射光が反射点P3で鏡面反射し、地点P2で散乱反射した多重反射光であるか否かを判定する。鏡面反射を伴う多重反射光であると判定されたときに、鏡面反射した地点P3までの距離d4を求める。
(もっと読む)
ステレオ画像対における画素のリアルタイムマッチングのための装置及びプログラム
【課題】ステレオ画像対の対応の画素をリアルタイムで正確にマッチングする装置を提供する。
【解決手段】補正されたステレオ画像対の画素対をマッチングする装置は、レンジカメラ画像内の画素をステレオカメラシステムの左右の画像中の画素にマッピングし、レンジカメラ画像内の画素の画素値をしきい値と比較するための前景/背景マッピングモジュール146と、前景/背景マッピングモジュール146に応答して、比較手段の比較結果により、第1の画像内の画素に対応する第2の画像内の画素について、第1のディスパリティ探索又は第2のディスパリティ探索を選択的に行うためのディスパリティ探索モジュール148とを含む。
(もっと読む)
3次元計測装置
【課題】物体の形状や物体までの距離を、短時間で更に安価な装置で計測し、製品の形状不良や障害物回避の情報を提供する3次元計測装置。
【解決手段】ライン光源(5)から投光する光線の角度が、段階的に指定可能なライン光線(6)を計測物体(4)に当て、その光跡を受光レンズ(3)を用いてPSD集合体基板(1)に映す。
PSD集合体基板(1)に映し出された光跡によって個々のPSD(2)からは受光位置に相当する電気信号出す。
ライン光線(6)の角度を変更するごとに、ライン光線の投光角度とPSD(2)からの電気信号をデータ処理装置(9)で組み合わせ処理を行う。
ライン光線の移動方向はライン光線(6)の方向からライン光線(7)の方向へ段階的に移動する。
(もっと読む)
161 - 180 / 471
[ Back to top ]