
Fターム[2F112DA28]の内容
Fターム[2F112DA28]に分類される特許
101 - 120 / 471
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
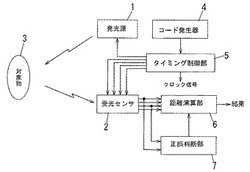
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
距離計測装置とその距離計測装置に用いられる受光装置

【課題】 対象物までの距離を正確に計測することができる距離測定装置、及びその距離測定装置で用いられる受光装置を提供する。
【解決手段】 距離計測装置10は、照射部4と受光装置50を備える。照射部4は、対象物30に向けて照射光20を照射する。受光装置50は、受光部60と演算部70を備える。受光部60は、対象物30で反射した反射光40を受光して電気信号に変換する。演算部70は、照射光20と反射光40に基づいて対象物30までの距離を演算する。演算部70は、計時器2と光量測定器12と距離データ計算器16を備える。計時器2は、照射された照射光20が対象物30で反射して受光部60に至るまでの時間を計測する。光量測定器12は、反射光40の光量を測定する。距離データ計算器16は、計時器2で計測された時間と光量測定器12で測定された光量を利用して、対象物30までの距離データを出力する。
(もっと読む)
ステレオ画像処理装置およびステレオ画像処理方法
【課題】標準的な領域照合に基づくステレオマッチングにおいて照合精度の低下を抑制するためには、画像の局所的な性質に応じて、照合領域を適応的に変更するのが効果的であるが、計算コストが高い。
【解決手段】複数のカメラで複数の画像データを撮像する撮像部101と、撮像部101で撮像された複数の画像データを格納する画像メモリ102と、複数の画像データから求められた視差データを格納する算出済み視差格納部105と、画像メモリ102から読み込んだ複数の画像データと、算出済み視差格納部105から読み込んだ視差データと、に基づいて、画素毎に照合領域を設定する照合領域制御部103と、画像メモリ102から読み込んだ複数の画像データと、照合領域制御部103で設定された画素毎の照合領域と、に基づいて画像データを照合し、視差データを算出する視差演算部104と、を有するステレオ画像処理装置。
(もっと読む)
三次元形状測定装置
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
画像センサとその画像センサに用いられる受光装置
【課題】 距離画像データと部位判別画像データの双方を取得可能な画像センサを提供すること。
【解決手段】 画像センサ100は、照射装置20と撮像装置40と演算装置60を備えている。照射装置20は、第1波長光を照射する第1光源22と、第2波長光を照射する第2光源を有する。演算装置60は、少なくとも第1波長光が照射装置20から対象物で反射して撮像装置40に到達するまでの距離に基づいて距離画像データを演算する。演算装置60はさらに、対象物における第1波長光の第1反射光の反射特性と対象物における第2波長光の第2反射光の反射特性の差に基づいて部位判別画像データを演算する。
(もっと読む)
三次元形状測定装置
【課題】測定領域が狭小の場合のみならず比較的広大の場合であっても、被測定物の三次元形状を測定可能とする三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化する光パルスを生成するパルス光源30及びチャープ導入装置32と、生成された前記光パルスをワーク24の表面26に照射し、前記ワーク24で反射された前記パルス光を所定のタイミングで所定の光量だけ切り出し、前記光パルスの反射光像を取得する反射光像取得部70と、取得された前記反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得するカラー二次元検出器52とを備え、反射光像取得部70は、ワーク24に照射される前記光パルスの照射領域42を拡縮する焦点位置補正部66と、拡縮された照射領域42に応じて前記光パルスを切り出す前記所定の光量を調整するシャッタ動作補正部68とを有する。
(もっと読む)
デュアルステレオカメラを備えた距離測定装置
【課題】より正確な距離情報を抽出できるデュアルステレオカメラを備えた距離測定装置を提供する。
【解決手段】距離測定装置は、1つの基板上に所定の間隔で配置された左眼CMOSイメージセンサ113及び右眼CMOSイメージセンサ115を有し、基準物体の視差を検出して距離情報を抽出する第1ステレオカメラ110と、該第1ステレオカメラ110から一定距離隔てて配置され、1つの基板上に所定の間隔で配置された左眼CMOSイメージセンサ123及び右眼CMOSイメージセンサ125を有し、基準物体の視差を検出して距離情報を抽出する第2ステレオカメラ120と、前記第1ステレオカメラから得られた基準物体に対する距離情報と前記第2ステレオカメラから得られた前記基準物体に対する距離情報を比べて、前記基準物体に対する距離情報を抽出する距離マップマッチング部130とを備える。
(もっと読む)
空間情報検出装置
【課題】複数台の空間情報検出装置が存在する場合でも、独立して空間情報を検出する。
【解決手段】空間情報検出装置は、対象空間に投光する発光源2と、発光源2から投光する光の強度を変調する発光制御部3と、対象空間からの受光光量に応じた電荷を生成する光検出素子1と、光検出素子1の出力から対象空間に存在する物体Obまでの距離を求める距離演算部4とを備える。発光制御部3は、投光期間と休止期間とを設けるように発光源2を制御する。距離演算部4は、休止期間の電荷から環境光成分における変動成分の存否を判定する干渉判定部を備える。距離演算部4は、光検出素子1が受光する環境光成分のうち特定の2種類の位相区間の差分の積算値を所定の積分時間において求め、干渉判定部において積算値の差分が環境光成分の影響を受けていると判定した場合は当該差分を採用せず、差分が閾値以下の場合に当該差分を用いて空間情報としての距離を求める。
(もっと読む)
画像撮像装置
【課題】レーザレーダの測距精度の向上、レーザ光路上に複数の目標が有る場合への対応、および霧・雨等の影響を除去したデータ(画像)の取得。
【解決手段】レーザ照射後、光路上の全ての反射レーザ光の信号レベルをA/D変換器により時系列に取得する。A/D変換した信号からソフトウエアによる移動平均、ピーク検出処理により受光信号のピークレベルを正確に検知し、精度の高い測距データを得る。また、A/D変換データ上にある複数のピークを検出することにより、複数目標の距離を測定可能となる。更に、A/D変換データ上の所定の閾値以上の反射信号強度のみを抽出、表示することにより、霧・雨や背景のデータを削除した画像を表示する。
(もっと読む)
距離画像撮影装置
【課題】正確な距離画像の撮影を可能とする距離画像撮影装置を提供する。
【解決手段】撮像空間内に向けて光波を照射し、当該光波を照射された当該撮像空間内の物体からの反射波の伝搬遅延時間に基づいて物体までの距離を示す距離画像を撮像する距離画像撮影装置であって、異なる波長帯の複数の光波を他の物体に向けて発光する光波照射手段と、複数の光波の反射波を波長帯毎に受光し、各反射波の受光量を検出する受光手段と、複数の光波各々の伝搬遅延時間を算出する遅延時間算出手段と、受光した反射波の受光量の大きさを各々比較して、当該受光量の大小を判定する受光量判定手段と、少なくとも、受光手段における受光量が最も大きい波長帯の光波の伝搬遅延時間に基づいて物体までの距離を算出する距離算出手段と、距離算出手段により算出された物体までの距離に基づいて距離画像を生成する距離画像生成手段とを備える、距離画像撮影装置。
(もっと読む)
撮像装置及びその制御方法
【課題】撮像対象との距離を表す距離画像を生成する際に、撮像対象の光反射やその光沢などの外乱、測定原理等に起因する距離の誤差の低減を実現する。
【解決手段】撮像対象との距離を計測するための画像を撮像する第1の撮像手段110と、第1の撮像手段110で撮像された画像に基づくデータを用いて撮像対象までの距離を算出する距離算出手段130と、偏光成分を計測するための画像を撮像する第2の撮像手段122と、第2の撮像手段122で撮像された画像に基づくデータを用いて偏光状態の解析処理を行う偏光解析手段140と、距離算出手段130で算出された距離に係る距離情報103及び偏光解析手段140で解析処理された偏光状態に係る偏光解析情報105に基づいて、撮像対象の距離画像106を生成する距離画像生成手段150を備える。
(もっと読む)
測距装置
【課題】測距装置の利便性を向上させる。
【解決手段】測距装置11には、送光レンズ22乃至カラーフィルタ25からなる照準望遠光学系が設けられ、ユーザは、カラーフィルタ25から目標物を確認することができる。また、収納部37には、接眼部26に着脱可能な、特性の異なるカラーフィルタ25が複数格納されている。カラーフィルタ25は、各天候に対してまぶしさを軽減させ、かつコントラストを向上させる特性を有しているため、ユーザは、外部環境に適したカラーフィルタ25を接眼部26に装着することができる。このように、測距装置11に対して着脱可能な、互いに特性の異なるカラーフィルタ25を設けることで、測距装置11の利便性を向上させることができる。本発明は、ゴルフ用のレーザ距離計に適用することができる。
(もっと読む)
光学式測距装置、およびそれを用いた電子機器
【課題】測距値のばらつきの低減を図る。
【解決手段】測距対象物7までの距離を求める三角測量方式を用いた光学式測距装置1では、測距対象物7に光を照射する発光素子2と、発光素子2から照射した光を集光にする発光光学系3と、測距対象物7からの反射光を集光して2つの光束にする受光光学系4と、受光光学系4で集光した2つの光束を結像して2つの光スポット61,62を形成する受光素子5と、が設けられている。受光光学系4と発光光学系3は、一体的に設けられている。受光光学系4における基線長をΔLとし、受光素子5上における2つの光スポット61,62間の距離を距離Δxとし、受光光学系4と受光素子5との間の距離を距離dとして、発光光学系3から測距対象物7までの距離yを、基線長ΔLと距離Δxと距離dとにより測定する。
(もっと読む)
アウターミラー装置
【課題】車両の向きと進行方向にずれが生じた場合でも進行方向に撮像範囲を補正することができるアウターミラー装置を提供する。
【解決手段】撮像範囲補正装置1は、主に、車両2の周囲を撮像する左撮像部10、及び右撮像部11と、車両2の操舵角δに基づいて、左撮像部10の撮像範囲210、及び右撮像部11の撮像範囲220を補正する補正情報を生成する補正情報生成部18と、補正情報生成部18から入力した補正情報に基づいて左及び右撮像部10、11を駆動して撮像範囲210、220を補正する駆動部12と、補正された撮像範囲210を撮像した左撮像部10から出力された左画像情報、及び補正された撮像範囲220を撮像した右撮像部11から出力された右画像情報に含まれる対象物3と車両2との距離を算出する距離算出部17と、を備えて概略構成される。
(もっと読む)
光学式変位計
【課題】
装置構成がシンプルで安価に製造することができ、かつ測定対象物の変位を高精度に測定することができる光学式変位計を提供する。
【解決手段】
被検面における測定点Aからの反射光路上に中心O’が位置すると共に、距離AO’が曲率半径となるように凹面鏡を配置し、前記測定点Aと前記凹面鏡との間の前記反射光路上に中心Oが位置するようにハーフミラーを配置し、かつ前記ハーフミラーでの反射光を受光する受光素子を設けて光学系を構成する。
(もっと読む)
空気調和機
【課題】熱画像上で検出された人体の詳細な奥行き方向の位置を考慮した精度のよい気流制御を行うことができる空気調和機を提供する。
【解決手段】この発明に係る空気調和機は、本体の前面に所定の俯角で下向きに取り付けられ、温度検出対象範囲を左右に走査して温度検出対象の温度を検出する赤外線センサと、赤外線センサにより人体や発熱機器の存在を検知して、当該空気調和機の制御を司る制御部とを備え、制御部は、赤外線センサを走査して部屋の熱画像データを取得し、部屋の奥行き方向の赤外線センサの視野角の中心座標に直立する人体の足元温度に相当する赤外線センサの出力を基準としたとき、部屋の奥行き方向の人体の立ち位置により変わる足元温度に相当する赤外線センサの出力の基準との差の基準に対する比率により人体の当該空気調和機からの奥行き方向の距離の詳細を求めるものである。
(もっと読む)
光学式測距センサおよび電子機器
【課題】広い測距範囲を実現できると共に、その範囲内の遠距離側にある低反射物体でも正確に検知できる光学式測距センサを提供すること。
【解決手段】赤外LEDを駆動する時間と、受光素子側の露光時間を同一タイミングとし、更に、赤外LEDを駆動させない期間に受光素子側を上記露光時間と同じ時間だけ露光させる。赤外LEDを駆動する場合の露光に基づく出力と、赤外LEDを駆動しない場合の露光に基づく出力との出力差を求め、この出力差に基づいて測距を行う。
(もっと読む)
イメージセンサー及びそれを用いた視差センサー並びに視差画像の生成方法
【課題】複数の対象物に対しても、正しい距離検知が可能となるイメージセンサー及びそれを用いた視差センサー並びに視差画像の生成方法を提供する。
【解決手段】受光量に応じて端子電圧が変化するフォトダイオードPDの端子電圧Vpdが所定の閾値を超えたときにオフになるスイッチング素子SWを介して画素内コンデンサーCに、撮像する空間の位置に応じて異なるアナログ電圧信号Vmrkを与える機能を有する画素回路60で構成されたイメージセンサー。このイメージセンサーは、撮像する空間の位置に応じて画素検知信号が異なるので、異なった位置に存在する同一形状の対象物に対する検知信号が区別できる。
(もっと読む)
塗布方法及び塗布装置
【課題】液面の位置を正確に検出して、高品質な塗膜を形成することができるスリットコート式の塗布方法及び塗布装置を提供する。
【解決手段】液槽に貯留された塗布液をノズルから流出させると共に当該ノズルと基板を前記基板の塗布面の面方向に相対移動させて塗布液を基板に塗布する塗布方法において、前記液槽の液面77に対して鉛直方向下方から検査光76を照射して液面77からの反射光78を受光して反射光78の受光位置から液面77の位置を検出する際に、前記検査光76が透過する第1透過部74及び前記反射光78が透過する第2透過部75の少なくとも何れか一方を前記液面77に対して傾斜させて液面77の位置を検出する。
(もっと読む)
面位置検出装置及び露光装置
【課題】被検面のパターン又は反射率分布の影響を低減させて、被検面の法線方向の位置情報を高精度に検出する。
【解決手段】計測光L1をレチクル面Raに照射し、レチクル面Raからの反射光L2を光電センサ37で受光して、レチクル面Raの面位置情報を検出する装置において、計測光L1をレチクル面Raに照射して反射光L2を受光する対物レンズ35と、対物レンズ35を介した反射光L2を光電センサ37に通すピンホール板36とを含む共焦点光学系と、計測光L1にレチクル面Ra上での照射面積を広げるように、かつ反射光L2にピンホール板36上での照射面積を狭くするように位相分布を付与する位相板33とを備える。
(もっと読む)
101 - 120 / 471
[ Back to top ]