
Fターム[2F112DA28]の内容
Fターム[2F112DA28]に分類される特許
141 - 160 / 471
立体物検出装置およびその方法
【目的】単眼カメラによる撮影画像に影が存在する場合においても、影を立体物と誤認識せず、立体物を正確に検出できるようにし、接触事故や人身事故を防止する「立体物検出装置およびその方法」を提供することにある。
【構成】単眼カメラにより任意の時刻t1と該時刻t1より所定時間経過した時刻t2におけるそれぞれの撮影画像を視線変換した俯瞰画像を取得し、一方の俯瞰画像を自車の移動量に基づいてシフトしたシフト画像とシフトしていない俯瞰画像との第1差分画像を算出し、該時刻t1およびt2の自車影画像を算出し、一方の自車影画像を自車の移動量に基づいてシフトしたシフト影画像とシフトしていないシフト影画像との第2差分画像を算出し、該第1差分画像と該第2差分画像との差分である第3差分画像を算出し、該第3差分画像に残存差分が存在する場合には立体物が存在すると判断する。
(もっと読む)
内視鏡装置における距離情報取得方法および内視鏡装置

【課題】患者の負担の増大やコストアップを招くことなく被観察体とスコープ部の撮像素子との距離情報を取得する。
【解決手段】照明光を被観察体に照射する照明光照射部と照明光の照射により被観察体から反射された反射光を受光して被観察体の像を撮像する撮像素子とを有するスコープ部と、スコープ部の撮像素子から出力された画像信号に分光画像処理を施して所定波長の分光推定画像信号を生成する分光画像処理部とを備えた内視鏡装置において、被観察体と撮像素子の各画素との距離情報を取得する距離情報取得方法であって、分光画像処理部において、撮像素子から出力された画像信号に基づいて、650nm以上の所定波長の分光推定画像信号を距離情報取得用分光推定画像信号として生成し、距離情報取得用分光推定画像信号に基づいて、撮像素子の各画素と被観察体との距離を示す距離情報を取得する。
(もっと読む)
形状測定装置
【課題】被測定物の連続的かつ機械的な駆動なしに焦点面の異なる画像情報を短時間で得られる形状測定装置を提供する。
【解決手段】光量センサー2はセンサー素子2a〜2dを1次元方向に備える。センサー素子2a〜2dは光学系(図示せず)によって、被測定物1の計測線12近傍の高さHa,Hb,Hc,Hdに焦点Va,Vb,Vc,Vdを結ぶ。被測定物1の表面13は黒白に塗り分けられ、センサー素子2a〜2dと光学系を被測定物1の領域Y1から領域Y8方向に移動走査する。時刻で各センサー素子の光量値を読み出し、その値を位置とともに記録する。各センサー素子の光量値は、被測定物1の表面13に合焦ならば表面色の黒13bまたは白13wに対応し、合焦でなければ黒と白が混ざった灰色の値を持つ。この黒,白,灰色の光量値に基づき高さHa〜Hdについて合焦評価を行うことで、各領域Yについての高さを同定できる。
(もっと読む)
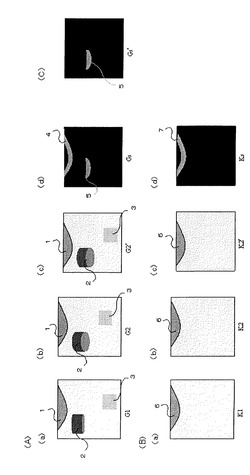
動き補償を用いた画像の奥行き抽出のためのシステムおよび方法
画像の空間時間的奥行き抽出のためのシステムおよび方法が提供される。システムおよび方法は、シーンからの画像のシーケンスを取得し(502)、前記シーケンスは画像の複数の相続くフレームを含み、少なくとも一つのフレームについて、第一の画像中の少なくとも一つの点の第二の画像中の少なくとも一つの対応する点との視差を推定し(504、506)、前記第一の画像中の前記少なくとも一つの点の動きを推定し(605)、前記シーケンスの前方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記少なくとも一つの次の後続フレームの視差を推定し(508)、ここで、前記推定視差は推定された動きを用いて補償され、前記シーケンスの後方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記複数の相続くフレームのそれぞれの推定された視差を最小化する(512)ことを含む。 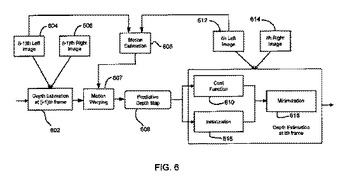 (もっと読む)
(もっと読む)
半導体装置及びその製造方法
【課題】受光部及び発光部を含む光学的センサーとして構成された半導体装置において、その小型化を図る。
【解決手段】半導体チップ1を構成する半導体基板10の表面に受光部10P及び発光部10Lが配置されており、それらと対向して、接着剤15を介して支持体16が貼り合わされている。そして、支持体16の表面から受光部10Pを露出する第1の開口部16Aが設けられ、それと離間して、支持体16の表面から発光部10Lを露出する第2の開口部16Bが設けられている。また、半導体基板10の表面には第1の電極12A及び第2の電極12Bが配置され、それらと電気的に接続されたバンプ電極24A,24Bが半導体基板10の裏面に配置されている。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8と、タイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像ごとにオブジェクトを検出し、オブジェクトの輝度に基づいて、前記オブジェクトまでの距離を表す距離画像データを生成する画像処理部10を備えた。
(もっと読む)
画像処理方法
【課題】簡便な手法によりシーンの奥行き推定または前景抽出可能な画像処理方法を提供すること。
【解決手段】赤色光、緑色光、及び青色光をそれぞれ透過する第1乃至第3フィルタ領域20〜22を有するフィルタ3を介して、対象物体をカメラ2により撮影するステップS10と、撮影して得られた画像データを、赤色、緑色、及び青色成分に分離するステップS11と、前記赤色、緑色、及び青色成分のそれぞれにおける画素の対応関係を、三次元色空間における線型色モデルからの画素値のずれを基準に判断するステップS13と、前記赤色、緑色、及び青色成分において対応する各画素の位置ずれ量に応じて、各画素の奥行きを求めるステップS14、S15と、前記奥行きの大きさに応じて、前記画像データを加工するステップとを具備する。
(もっと読む)
バックグランド放射光の抑制に有利なTOF領域
放射光の飛行時間を測定する方法は、第1の変調信号に応じて変調光(51)を放出するステップと、シーン(55)に変調光(51)を投影するステップと、放射光を受光するステップとを含み、受光した上記放射光は、少なくとも、シーン(55)によって反射された変調光を含んでいる。受光した上記放射光(26、27)は、放射光により誘起する電気信号に変換される。上記放射光により誘起する電気信号は第2の変調光と混合され、従って、混合信号を生成する。混合信号は、積分され、従って、積分信号を生成する。上記積分信号が閾値(Vref)を超えるとき、電荷は積分信号に注入される。上記方法は、第1及び第2の変調信号の変化を時間内に1または複数の期間で適合するステップと、時間内の1または複数の期間で積分信号を測定するステップとを含み、従って、少なくとも1つのTOFペアの信号の差(62)を取得するステップを含んでいる。上記測定するステップは、単一の検出器ノード(38)を使用するステップと、TOFペアの信号の差(62)を取得するために、メモリエレメント(25)を連結させるステップを含んでいる。上記方法は、更に、放射光の飛行時間を決定するための1または複数のTOFペアの信号の差を使用するステップを含む。  (もっと読む)
(もっと読む)
固体撮像素子及び測距装置
【課題】撮像部の出力をその平均値を基準として差動増幅する際に発生する誤差成分の影響をなくすことができる固体撮像素子及びこのような固体撮像素子を用いた測距装置を提供すること。
【解決手段】隣接して配置される複数の画素列111a、111bの光電荷蓄積を同じタイミングで行う。画素列111aからの信号の読み出し時に、平均値保持回路121において画素列111aからの信号の平均値を演算して保持しておくとともに、利得設定値保持回路123において平均値基準読み出しの際の利得を演算して保持しておく。画素列111bからの信号の読み出し時に、平均値保持回路121に保持しておいた平均値及び利得設定値保持回路123に保持しておいた利得を用いて、差動増幅回路126における差動増幅を行う。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
撮像装置
【課題】撮像装置において、簡易な構成で、好適に被写体までの距離を測定可能とする。
【解決手段】撮像装置は、複数のレンズ(100)と、複数のレンズの各々を介して、同一の被写体(500)を複数の像(550)として撮像する撮像素子(210)と、撮像素子により同時に若しくは並行して撮像される複数の像のうち二つの像に係る又は撮像素子により時間的に相前後して撮像される複数の像のうち一つの像に係る、二つの結像位置の相互間に、視差量を付与する視差量付与手段(310,320)と、二つの結像位置の相違に基づいて、撮像素子及び被写体間の距離を算出する距離算出手段とを備える。
(もっと読む)
距離測定装置および距離測定方法
【課題】対象物の距離情報を短時間で測定できる、小型の情報測定装置を提供する。
【解決手段】画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像センサカメラ1は、メインレンズ11と、シャッター12と、マイクロレンズアレイ13と、撮像セルアレイ14とを含む。シャッター12の開口パターンは複数あり、各パターンにおいて、シャッター12の各開口部を通過する光は、撮像セルアレイ14の互いに異なる領域に入射する。
(もっと読む)
相関演算方法、相関演算装置、焦点検出装置および撮像装置
【課題】同一性が崩れた一対のデータ列の相関関係を演算する。
【解決手段】複数の第1データA1,A2,・・が一次元上に配列された第1データ列ANと、複数の第2データB1,B2,・・が一次元上に配列された第2データ列BNとを、一次元上で変位量を変えながら相対的に変位させ、第1データ列ANと第2データ列BNの間の相関量を演算して相関量の極値が得られる変位量を求める相関演算方法において、複数の第1データAn、An+1のN階(ただし、N=1,2,・・)の差分データ(An−An+1)から成る第3データ列と、複数の第2データBn+k、Bn+1+kのN階の差分データ(Bn+k−Bn+1+k)から成る第4データ列との間で内積演算を行い、算出された演算値を相関量とする。
(もっと読む)
距離測定センサ及びそれを備えた立体カラーイメージセンサ
【課題】基板に垂直に形成されたフォトゲートを備えて光受光領域を拡張した距離測定センサ及びそれを備える立体カラーイメージセンサを提供する。
【解決手段】基板に第1不純物をドーピングして形成され、光を受けて光電荷を発生する光電変換領域と、前記基板に第2不純物をドーピングし、前記光電変換領域を挟んで互いに対向するように離隔して形成され、前記光電荷を集め保存する第1及び第2電荷保存領域と、前記第1及び第2電荷保存領域にそれぞれ対応して前記基板に所定の深さで形成される第1及び第2トレンチと、前記第1及び第2トレンチ内にそれぞれ形成される第1及び第2垂直フォトゲートとを有する。
(もっと読む)
視差センサおよび視差画像の生成方法
【課題】帯状のパターン等を削除して、対象物の特徴パターンのみを得ることのできる視差センサおよび視差画像の生成方法を提供する。
【解決手段】第1画像と第2画像のそれぞれに対応するパルス信号比較回路アレイ5a,5bの出力である比較パルス信号のそれぞれの組み合わせからなる2つの比較パルス信号に対して、両者の排他論理和をとった差分パルスの全パルス長を、その全パルス長に比例する信号に変換し、この信号を相関信号として出力する相関検知回路マトリックス6を備えている視差センサにおいて、パルス信号比較回路アレイ5a,5bの出力である比較パルス信号のパルス幅が一定の長さ以下であることを検知するゼロ信号検知回路と、そのゼロ信号検知回路の出力信号に従って比較パルス信号または予め決められた信号を選択し相関検知回路に出力する選択回路とからなるゼロ相関除去信号発生回路アレイ15a,15bを備えた。
(もっと読む)
画像処理装置および画像処理方法並びにプログラム
【課題】画像処理装置において、カラー画像から精度の高い距離データを取得できるようにする。
【解決手段】被写体を2つの視点から撮像して得た、各々が複数の色の濃淡画像で構成された一対の画像データから被写体までの距離を算出して立体画像データを生成する画像処理装置において、一対の画像データを入力し、入力された一対の画像データの複数の色の複数の画素について距離を算出し、入力された一対の画像データの少なくとも一方の画像データにおいて、画像データを構成する複数の色の濃淡画像のうちから最も距離の算出に適する1つの色の濃淡画像を選択し、選択された色の濃淡画像において算出された距離のデータを記録する。
(もっと読む)
距離あるいは変位を検出する検出器およびこれを用いるレール変位量測定装置
【課題】
回動ミラーの歪みを改善することにより距離あるいは変位の検出精度を向上させることができる距離あるいは変位を検出する検出器を提供することにある。
【解決手段】
この発明は、対象物と光式センサとの間に回動ミラーを介在させて回動ミラーが回動することで変動する対象物の特定の測定点に投光し、その反射光を受光して測定点までの距離あるいは変位を検出する検出器において、前記の回動ミラーが、誘電体多層膜が設けられたガラス製基板の裏面側にチタン製基板あるいはチタン合金製基板を張り合わせたものである。
(もっと読む)
検出装置
【課題】簡素で、外乱を受けにくく、可能な限り長寿命を確保できる構造を採用し、広い角度範囲(最大360度まで)に渡って監視領域の物体を確実に検出できる検出装置を提供する。
【解決手段】監視領域11の物体を位置分解的に検出する検出装置は、送信領域19に電磁波を出射する送信装置15と、受信領域23から反射された電磁波を受信する受信装置21とを備え、前記送信領域19及び受信領域23は前記監視領域11において一定の検出角度をカバーする検出領域27の内部で互いに重畳又は交差し、該検出領域27で出射波17が前記物体により反射され、更に、前記出射波17の伝播経路及び/又は反射波25の伝播経路に設置され、どの時点においても前記検出領域27全体を送信側及び/又は受信側でカバーする結像系29と、前記反射波25をその反射位置に関して識別するための位置分解手段31とを備える。
(もっと読む)
光学式三次元測定および色測定の装置および方法
本発明は光学式三次元測定および色測定のための装置および方法に関し、この装置は、多色共焦点測定方式、三角測量測定方式または他の測定方式による光学式三次元測定のための第1のモードと、色測定のための第2のモードとの間で調整可能であり、第1のモードにおいて広帯域の照明光線が測定対象物表面の第1の平面に集束し、第2のモードにおいて広帯域の照明光線が、測定対象物の表面から一定の間隔dをおいて第1の平面の外部にある第2の平面に集束する。 (もっと読む)
距離測定装置および距離測定方法
【課題】奥行き分解能の高い距離測定装置あるいは距離測定方法を提供する。
【解決手段】本発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成画像を生成する再構成部4aと、複数の再構成画像の各々を複数の領域に分割し、各領域について、領域に含まれる画素の輝度の大きさを代表する第1の代表値を算出し、第1の代表値に基づいて画素群内の輝度分布の偏りの大きさを表わす第2の代表値を算出する輝度情報算出部4bと、第2の代表値に基づいて対象物までの距離を算出する距離情報算出部4cとからなる。
(もっと読む)
141 - 160 / 471
[ Back to top ]