
Fターム[2F112DA28]の内容
Fターム[2F112DA28]に分類される特許
21 - 40 / 471
検知距離設定装置及びこの検知距離設定装置を備えた自動水栓装置
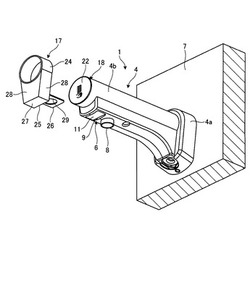
【課題】判定距離が非常に短い値となって、使い勝手が悪化してしまうことを防止できる検知設定部及びこの検知距離設定装置を備えた自動水栓装置を提供する。
【解決手段】自動水栓装置1はスパウト4とカバー17と検知距離設定装置6とを備えている。スパウト4の先端部4bには吐水口8と検知センサ9が設けられている。カバー17は吐水口8に係止し検知センサ9を覆ってスパウト4の先端部4bに取り付けられる。検知距離設定装置6はスパウト4の先端部4bに検知物が近付いたか否かを検出する検知センサ9と制御装置を備えている。制御装置は赤外線発光素子に鉢の底面に向かって発光させて位置検出素子からの値と予め定められた設定動作開始距離に応じた設定動作開始値とを比較して検知物が設定動作開始距離外に位置していると判定すると判定値の設定を開始する。
(もっと読む)
測距装置

【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
変位検出装置
【課題】光源からの光を回折格子が設けられた領域で反射させて、被測定面の変位を検出する変位検出装置を提供する。
【解決手段】変位検出装置1は、光源2と、対物レンズ3と、分離光学系4と、コリメータレンズ7と、非点収差発生部8と、受光部9と、位置情報生成部10と、絞り部材11とを備えている。そして、対物レンズ3から出射され、被測定面に向けて集光される光の光軸に対する角度をθ、光源2の波長をλ、被測定面101に形成された回折格子のピッチをd、回折格子による回折光の次数をnとした場合に、遮蔽部11は、
を満たす反射光を遮蔽する。
(もっと読む)
固体撮像装置
【課題】画素の駆動精度を低下させることなく、グローバルシャッタ動作の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子と、1つ以上のMOSダイオード構造を構成する電極を有する単位画素と、前記電極に第1電圧を供給する第1電圧源側に設けられた第1接点と、前記電極に前記第1電圧より高い第2電圧を供給する第2電圧源側に設けられた第2接点と、前記第1接点と前記第2接点との間に設けられた第1コンデンサと、前記第1接点及び前記第2接点のどちらか一方に接続することで、前記電極に印加させる電圧を、選択的に前記第1電圧又は前記第2電圧に切り換える切換スイッチと、前記切換スイッチを駆動させて交互に前記第1電圧と前記第2電圧とを前記電極に印加させることで、前記光電子の発生、保持、転送、リセット、及び排出のいずれかを行う画素駆動部とを備える。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間及び第2受光期間で受光するとともに、第2照射タイミングで照射された前記照射光の前記反射光を、第3受光期間及び第4受光期間でそれぞれ受光し、前記演算部は、前記第1受光期間〜前記第4受光期間で得られた光電子数を用いて、測距対象までの距離を算出し、前記第1受光期間及び前記第3受光期間は、前記反射光が前記固体撮像装置に到達してから該反射光の強度が最大になるまでの時間を含み、前記第2受光期間及び前記第4受光期間は、前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含む。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
距離測定装置
【課題】光検出器のダイナミックレンジを簡易な構成で拡大することができ、測定対象物までの距離に拘らず、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、測定対象物で反射された反射光を集光する集光光学系と、一定の受光感度を有する複数の受光素子が被照射面内に配置された光検出器と、集光光学系と光検出器との間に配置された光量分布変換素子と、複数の受光素子から検出信号を取得し、取得された複数の検出信号に基づいて測定対象物までの距離を演算する制御部と、を備える。光量分布変換素子は、被照射面において、複数の受光素子の各々が配置される位置に応じて、予め定めた光量分布が得られるように、集光光学系で集光された反射光の光量分布を変換する。
(もっと読む)
カメラシミュレーション装置、カメラシミュレーション方法、及びカメラシミュレーションプログラム
【課題】効率的にカメラパラメータのキャリブレーションを行う。
【解決手段】カメラシミュレーション装置において、レンズシステムを模擬した模擬カメラ系で撮像した画像を取得する模擬カメラ系画像取得手段と、前記レンズシステムの設計値での焦点距離を用いたピンホールカメラ系で撮像した画像を取得するピンホールカメラ系画像取得手段と、模擬カメラ系画像取得手段により得られる第1の画像と、前記ピンホールカメラ系画像取得手段により得られる第2の画像との差分値を出力し、前記ピンホールカメラを用いた三角測距の視差に対して、前記差分値を用いて視差誤差の予測値を出力する視差誤差出力手段とを有することで、上記課題を解決する。
(もっと読む)
ステレオカメラ装置、視差画像生成方法
【課題】広い視野角と視野内の特定領域では高い測距精度を両立したステレオカメラ装置を提供すること。
【解決手段】二つの撮像手段C0、C1と、画像データを等距離射影画像に投影する二つの光学系21と、二つの等距離射影画像から第一の変形画像データ及び第二の変形画像データを生成する第一の画像生成手段31,33と、二つの等距離射影画像の所定領域から第三の変形画像データ及び第四の変形画像データを生成する第二の画像生成手段32,34と、第一の変形画像データと第二の変形画像データから第一の視差画像を生成する第一の視差画像生成手段35と、第三の変形画像データと第四の変形画像データから第二の視差画像を生成する第二の視差画像生成手段36と、第一の変形画像データと第三の変形画像データの倍率により定まる第一の視差画像の画素の画素値を、第二の視差画像の画素の画素値で置き換える画像合成手段37と、を有する。
(もっと読む)
ステレオカメラ装置、画像補整方法
【課題】行毎の撮影時刻が異なる撮像素子を利用したステレオカメラにおいて、光軸ずれによる画像の位置ずれだけでなく、動体歪みも補正することが可能なステレオカメラ装置を提供すること。
【解決手段】2つの画像の相関度から被写体との距離情報を検出するステレオカメラ装置100であって、行と列に配列された画素のうち行毎の撮影時刻が異なる撮像素子C0,C1が2つ配置された画像撮影手段200と、2つの撮像素子の相対的な位置ずれ量を検出する位置ずれ検出手段12と、前記位置ずれ検出手段が検出した垂直方向の前記位置ずれ量に応じて、2つの前記撮像素子の一方の撮影開始時刻を変更する開始時刻変更手段13と、2つの前記撮像素子が撮影した2つの画像の一方を、垂直方向の前記位置ずれ量と同程度、垂直方向に平行移動させる補正手段11と、を有することを特徴とする。
(もっと読む)
撮像装置
【課題】画角内の輝度差が大きい場合であっても正確なデプスマップを得られる撮像装置を提供する。
【解決手段】所定の焦点面の近傍に二次元状に配置された複数の正レンズと、複数の正レンズの各々に対応して当該正レンズの後側に配置された複数の受光素子を有する第1の撮像素子と、複数の正レンズの各々について、前記第1の撮像素子の出力から、当該正レンズに像が結ばれた被写体までの距離を表す値を算出する距離算出手段と、第1の撮像素子に複数回の撮像をそれぞれ異なる電荷蓄積時間で連続して行わせる制御手段と、前記第1の撮像素子により連続して行われた複数回の撮像の各々についてデプスマップを作成するデプスマップ作成手段と、デプスマップ作成手段により作成された複数回の撮像にそれぞれ対応する複数のデプスマップを合成して合成デプスマップを作成する合成手段と、を備える撮像装置。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、符号化開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数から撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
21 - 40 / 471
[ Back to top ]