
Fターム[2F112FA01]の内容
Fターム[2F112FA01]に分類される特許
1 - 20 / 67
測距センサを備える距離測定装置および距離測定方法
【課題】装置に要求される距離範囲内における測距精度を向上させるとともに、センサの個体バラツキを補正した出力値―距離変換を実現する距離測定装置、距離測定方法、および該距離測定装置を備えた表示装置を提供する。
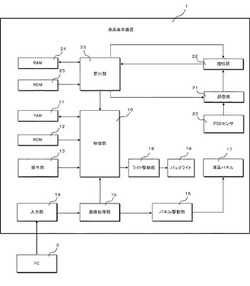
【解決手段】出力値と距離とが反比例の関係を有するPSDセンサ20において、装置に要求される距離範囲内における最長距離での出力値に応じたオフセット補正を行う調整部21と、該装置に要求される距離範囲における最短距離での出力値に応じてゲイン補正を行う増幅部22を設ける。さらに、中間距離での出力値を測定し、最長距離・最短距離・中間距離の3点での出力値に基づいて、測距センサ固有の特性曲線を求め、PSDセンサ20の出力値を該特性曲線に当てはめることによって、測定対象物までの距離を算出する算出部23を設ける。
(もっと読む)
半導体装置の駆動方法

【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
変位センサ
【課題】分解能を維持しつつ広い計測レンジで変位を測定することが可能な変位センサを提供する。
【解決手段】センサヘッド100は、レーザダイオード1と、フォトダイオード2と、偏光ビームスプリッタ(PBS)3と、レンズ4〜6と、ピンホール7aが形成された絞り板7と、アーム8a,8bを有する音叉状の振動子8と、振動子8のアーム8aに取り付けられたレンズ9(コリメートレンズ)と、振動子8のアーム8bに取り付けられたレンズ10(対物レンズ)とを備える。レンズ9の焦点距離は、レンズ10の焦点距離の2倍以下、好ましくは1倍と定められる。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
変位センサ
【課題】計測処理に用いられる受光量データに飽和や不足が生じた場合でも、この受光量データが速やかに適切な状態に復帰するような感度調整を行う。
【解決手段】変位センサ1の受光部102に撮像素子12からの受光信号をそれぞれ異なる倍率で処理する信号処理部C1,C2,C3を設ける。このセンサ1では、投光部101および受光部102による検出処理の都度、信号処理部C1により生成された受光量データを用いて変位量を計測し、さらに次の検出処理の感度を調整する。感度の調整処理において、信号処理部C1による受光量データ中のピーク値が0に近似する場合には、より高い倍率が適用された信号処理部C2により抽出されたピーク値を使用する。また信号処理部C1による受光量データ中のピーク値が飽和している場合には、1倍の倍率が適用された信号処理部C3により抽出されたピーク値を使用する。
(もっと読む)
距離センサ
【課題】位相方式の距離センサにおける適切な距離レンジへの切り替えを実現すること。また、適切な距離レンジの検出を可能とすること。更に、送信波と反射波との位相差の正確な検出を可能とすること。
【解決手段】距離センサ100は、送信信号VTを「参照信号」とし、受信信号VRを「計測信号」とする2位相ロックインアンプ20を有して構成され、この2位相ロックインアンプ20によって、送信信号VTと受信信号VRとの位相差φが算出される。そして、距離計測を行う際には、先ず、分周器4の分周比Nを最大値Nmaxに設定し、このときに算出した測定距離Lxに応じて分周器4の分周比Nを最適な分周比Nに変更した後、再度、測定距離を算出する。
(もっと読む)
処理装置、光学式検出装置、表示装置及び電子機器
【課題】対象物の反射率の影響などを低減して精度の高い検出ができる処理装置、光学式検出装置、表示装置及び電子機器等を提供すること。
【解決手段】処理装置100は、第1、第2の光源部LS1、LS2からの照射光LT1、LT2が対象物OBに反射されることによる反射光LR1、LR2を受光する受光部RUの受光結果に基づいて、第1、第2の光源部LS1、LS2の発光制御を行う制御部110と、発光制御を行うための発光電流制御情報に基づいて、第1、第2の光源部LS1、LS2に対する対象物OBの位置関係を判定する判定部120とを含む。判定部120は、対象物OBが検出領域に存在しない第1の期間での発光電流制御情報である第1期間用発光電流制御情報LCNinitと、対象物OBが検出領域に存在する第2の期間での発光電流制御情報である第2期間用発光電流制御情報LCNdetとに基づいて、対象物OBの位置関係を判定する。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び1個の受光素子6を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。受光素子6は、光軸x2を振動板の反射光の光軸x1と平行にかつ僅かにずらして配置される。それに対応して、受光素子に入射するビームスポット形状は、その中心cを受光面6aの中心Oから僅かにずらして離れた位置に置いて投影される。受光素子から検出される光量は、振動板の変位に対応して増減する。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30からの距離が相違している。また、第1検出用光源12Aと第2検出用光
源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非
平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源1
2Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
視差センサ、及び視差画像生成方法
【課題】壁などの広い平面等を含む対象物であっても、簡単な照明装置のみで照度変化に関する特徴量を十分大きくすることができ、対象物を確実に検知することができる視差センサ等を提供する。
【解決手段】第1画像及び第2画像の撮像方向に広い平面等を含む対象物がある場合に、その対象物に対して第1画像及び第2画像の間で視差が生じる方向に照度が変化している照度分布を有する光を照射している状態で、パルス信号比較回路が、隣接する電圧・パルス幅変換回路が出力する2つのパルス幅画素信号を比較し、2つのパルス幅画素信号の+方向の差と−方向の差とをそれぞれ比較パルス信号として出力する。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
測距センサ
【課題】測距センサのサイズに関わらず感度を高める、もしくは低くすることのできると共に、被検査物が近くにある場合も、検出部分のサイズを大きくすること無く小型な測距センサを提供すること。
【解決手段】被検査物3に対して略平行光を照射する光源1,2と、前記被検査物3と光源1,2とを結ぶ直線上とは異なる位置に配置され、当該被検査物3で散乱された光を回折する体積ホログラム4と、前記体積ホログラム4で回折した光のうち+n次光と、−n次光(但し、nは整数)とをそれぞれ個別に受光する光検出器6,7と、前記光検出器6,7の出力から、被検査物3の変位量を出力する演算回路部8と、を備えることを特徴とする。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
信号生成装置および撮像装置
【課題】測距演算に適した露光量に対応した信号を生成することができる。
【解決手段】第1画素列PDA_b1は、光電変換素子を含む複数の画素PD_b(1)〜PD_b(2k−1)を備える。第2画素列PDA_b2は、光電変換素子を含む複数の画素PD_b(2)〜PD_b(2k)を備える。制御部300は、第1画素列PDA_b1の露光量と第2画素列PDA_b2の露光量とが異なるように、第1画素列PDA_b1の露光量と第2画素列PDA_b2の露光量とを制御し、この露光量に基づいた信号を第1画素列PDA_b1と第2画素列PDA_b2とが出力するように制御する。
(もっと読む)
光学式測距センサおよび電子機器
【課題】広い測距範囲を実現できると共に、その範囲内の遠距離側にある低反射物体でも正確に検知できる光学式測距センサを提供すること。
【解決手段】赤外LEDを駆動する時間と、受光素子側の露光時間を同一タイミングとし、更に、赤外LEDを駆動させない期間に受光素子側を上記露光時間と同じ時間だけ露光させる。赤外LEDを駆動する場合の露光に基づく出力と、赤外LEDを駆動しない場合の露光に基づく出力との出力差を求め、この出力差に基づいて測距を行う。
(もっと読む)
距離測定装置
【課題】発振器の周波数にゆらぎが生じても、ビートダウンした処理信号間の位相差から距離を測定する。
【解決手段】距離測定装置は、レーザ光束として光周波数コムを発生するレーザ装置1と、基準光27を受光する基準受光部3と、測距光28を受光する測定受光部6とを備える。第1ミキサ31および第2ミキサ32は、測定受光部6および基準受光部3の受光信号と特定の周波数を持つ発振器50の周期信号とを乗算する。第4フィルタ51および第5フィルタ52は、第1ミキサ31および第2ミキサ32で生成された信号成分から異なる周波数成分を抜き出す。第4フィルタ51および第5フィルタ52で抜き出された信号は、第3ミキサで乗算され、差の周波数成分が第6フィルタ54で抜き出される。位相差測定部12は、第6フィルタ54および第2フィルタ11からの2つの処理信号の位相差を測定し、距離測定部17は、その位相差から距離を測定する。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
1 - 20 / 67
[ Back to top ]