
Fターム[2F112FA41]の内容
Fターム[2F112FA41]に分類される特許
21 - 40 / 331
車両周辺監視装置
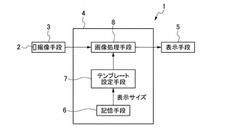
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
変位センサ

【課題】駆動装置を用いることなく、小型であっても、高精度で計測対象物の変位を測定することができる変位センサを提供する。
【解決手段】光源部を有する投光部と、光源部が出射する光を、計測対象物へ向けて集光して照射する照射部と、計測対象物で照射されて反射された光を集光して受光する第1受光部とを具備する光学系を備える変位センサであって、投光部は、光源部と、第1レンズと、第1ハーフミラーとを具備し、照射部は、第1ハーフミラーと、第2レンズとを具備し、第1受光部は、第1ハーフミラーと、少なくとも4つの穴を有し、この4つの穴はそれぞれxy軸上に配置されているスリット板と、第3レンズと、第1受光素子とを具備し、照射部及び第1受光部は、照射部の光軸と第1受光部の光軸とが一致するように配置され、投光部は、該投光部の光軸が照射部及び前記第1受光部の光軸と垂直に交わるように第1ハーフミラーを介して配置する。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
距離画像カメラおよび距離画像合成方法
【課題】1つ以上の物体までの距離や表面反射率に関わらず、距離画像のほぼ全体にわたって良好な距離精度を得ることが可能な距離画像カメラおよび距離画像合成方法を提供する。
【解決手段】発光部11と、反射光が戻るまでの時間から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、露出調節部13と、露出を段階的に変更しながら撮像した複数の距離画像において、同一の画素位置に対応する各画素の距離情報の重み付き平均値をそれぞれ算出するとともに、そうして算出された重み付き平均値を各画素の距離情報とするように合成した合成距離画像を求める演算制御部15とを備え、各画素は前記反射光の受光強度を示す受光レベル情報も有し、各画素の距離情報の重み付き平均値の算出では、その画素の前記受光レベル情報に応じて前記距離情報の精度に対応するように算出される重み付け係数が用いられる。
(もっと読む)
距離画像カメラおよびこれを用いた距離測定方法
【課題】箱などの物体の表面反射率が低い場合であっても、その物体までの距離を極力正確に測定することが可能な距離画像カメラおよびこれを用いた距離測定方法を提供する。
【解決手段】認識対象物体へ光を照射する発光部11と、照射された光の反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された画素P毎に有する距離画像Gdと、前記反射光の受光強度を示す受光レベル情報を画素P毎に有する受光レベル画像Gaとをそれぞれ取得する撮像部12と、これらの制御および演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は、受光レベル画像Gaを2値化した2値化受光レベル画像Gbを得る2値化処理部と、2値化受光レベル画像Gbに含まれる1つ以上の同一物体をそれぞれ認識する領域化を行う領域化部と、認識された同一物体毎に対応する各画素Pの距離情報を平均化する距離平均化部とを有する。
(もっと読む)
光測距装置
【課題】受信信号にノイズが載っているときにも対象物までの距離を測定可能な光測距装置を提供する。
【解決手段】接近する対象物に対してレーザパルスを繰り返し送信し対象物からの反射光を受信する信号受信手段と、受信した信号の最大振幅値を所定の閾値と比較する振幅比較手段と、振幅比較手段によりレーザパルス送信前の最大振幅値が閾値より小さいと判断されたときレーザパルスの送信時点と、信号受信手段により受信された受信信号の受信時点から対象物までの距離を計算する距離計算手段と、大きいと判断されたとき、受信信号の周波数特性を検知し、検知された周波数特性に他よりも大きい特定の周波数成分が検知されたとき、この特定の周波数成分を除いた後その出力を受信信号検知手段に入力する特定周波数成分除去手段と、検知されなかったとき、距離計算手段による対象物までの距離計算をせず、閾値より高い最大振幅値に変更する閾値変更手段とを有する。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
カメラシミュレーション装置、カメラシミュレーション方法、及びカメラシミュレーションプログラム
【課題】効率的にカメラパラメータのキャリブレーションを行う。
【解決手段】カメラシミュレーション装置において、レンズシステムを模擬した模擬カメラ系で撮像した画像を取得する模擬カメラ系画像取得手段と、前記レンズシステムの設計値での焦点距離を用いたピンホールカメラ系で撮像した画像を取得するピンホールカメラ系画像取得手段と、模擬カメラ系画像取得手段により得られる第1の画像と、前記ピンホールカメラ系画像取得手段により得られる第2の画像との差分値を出力し、前記ピンホールカメラを用いた三角測距の視差に対して、前記差分値を用いて視差誤差の予測値を出力する視差誤差出力手段とを有することで、上記課題を解決する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
画像処理装置
【課題】輝度のみならず被写体の表面微細凹凸の3次元情報までを高精細に再現できる小型で実現可能な画像処理装置を提供する。
【解決手段】偏光面制御素子106は、偏光板と液晶素子から構成されており、電圧により非偏光を任意の偏光面の直線偏光と変換できる。同期装置112は、偏光面制御素子106に偏光面回転の指示を送り照明の偏光面を回転させ被写体に照射すると同時に撮像素子110に撮影開始信号を送って映像を取得し、これを複数回実施する。撮像映像の信号は映像信号線111を経由して視差画像処理部108Aおよび輝度変動処理部108Bに送られる。視差画像処理部108Aでは、左右の偏光開口と中心に位置する非偏光部と通過する画像である各LL、画像RRCCを分離生成する。輝度変動処理部108Bでは、輝度値の変動を処理し、2回反射画像RTIMGを生成する。画像融合部121では、高感度の左右複数視点画像を生成して立体表示部122に送る。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法
【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム
【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、点対称性をもたない開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数および統計的手法を用いて、撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
車両の制御装置
【課題】路上物の誤検知により、運転者に違和感や煩わしさを感じさせる接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】物体認識部11により認識された物体と車両1との距離が、判定距離Dth以下になったときに、物体と車両1との接触を回避するための接触回避処理を実行する接触回避制御部17を備えた車両の制御装置であって、車両1の先行車両2の通過軌跡60を認識する先行車両軌跡認識部13と、物体認識部11により認識されたパイロン4が通過軌跡60上にあるか否かを判断する物体位置判断部14と、パイロン4が通過軌跡60上にあるときの判定距離Dthを、パイロンが通過軌跡60上にないときの判定距離よりも短く設定する判定距離設定部15とを備える。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
21 - 40 / 331
[ Back to top ]