
Fターム[2F129BB27]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 加速度センサ (2,547) | X軸(水平面内で進行方向と垂直な方向) (294)
Fターム[2F129BB27]に分類される特許
281 - 294 / 294
位置情報管理方法、および、装置
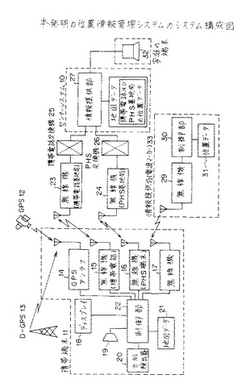
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地図データをダウンロードして使う。
(もっと読む)
測位航法用擬似距離推定回路、移動体測位装置及び移動体測位方法

【課題】INSとGPSの両航法における位置情報の入力側の正確度を高め、更に帰還情報の質を高めて、結果的により正しい位置情報を得る。
【解決手段】本発明の移動体測位装置は、測位衛星からの複数の擬似距離と、また測位航法部と慣性航法部とカルマンフィルタと、により移動体の航法位置を求める測位装置において、測位衛星と移動体間のドップラ観測値と、航法暦とカルマンフィルタ出力とにより測位衛星と移動体間の相対速度の計算をしてドップラ推定値を求め、複数の擬似距離から選択擬似距離を出力する衛星情報選択部13と、測位衛星から得る搬送波位相情報と選択擬似距離とカルマンフィルタの出力とで演算出力する擬似距離推定部14とを備えて、測位航法部15は、擬似距離推定値を入力として、測位航法速度と測位航法位置を出力し、カルマンフィルタ16は、擬似距離推定値と、測位航法部の出力と慣性航法部の出力とで状態推定値を求める。
(もっと読む)
車載機器
【課題】 温度変化によるずれを補正することで、実際の車体の状況に即した表示を可能とする。
【解決手段】 この車載機器には、車体に取り付けられる車載機器本体と、車載機器本体に設けられて種々の情報を表示する表示手段と、車載機器本体の進行方向に対する傾き及び水平方向に対する傾きを検出することで加速度を検出する加速度検出手段と、加速度検出手段の検出結果に基づいて表示手段を制御する制御手段とが備えられている。制御手段は、加速度検出手段が検出した進行方向に対する傾き及び水平方向に対する傾きが所定時間一定であった場合には、車体が停止状態と判断して、所定時間一定であった傾きを進行方向及び水平方向の基準値として設定する。
(もっと読む)
ナビゲーション装置
【目的】自動二輪車などの旋回時のロール角が大きな移動体の位置を精度良く求めるこ
とができ、ジャイロセンサの学習機能の構築が容易なカーナビゲーション装置を提供する
。
【構成】ナビゲーション装置10は、移動体1に設置されるとともにジャイロセンサに
よって前記移動体1の旋回角速度ωを検知・算出する旋回角速度検知・算出手段18を備
えており、特に、この旋回角速度検知・算出手段18は、移動体1の正立状態における上
下方向(X軸方向)及び前後方向(Y軸方向)に対して左右方向(Z軸方向)において、
上下方向のX軸に対して互いに逆方向に同一角度θ1、θ2(θ1=θ2=θ0)傾けて
左右対称に設置された同感度の2つのジャイロセンサ2A、2Bと、2つのジャイロセン
サ2A、2Bのセンサ出力回路9、9と、センサ出力回路9、9の出力信号の変化x1、
x2から移動体1の旋回角速度ωを算出する演算手段と、を備える構成である。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 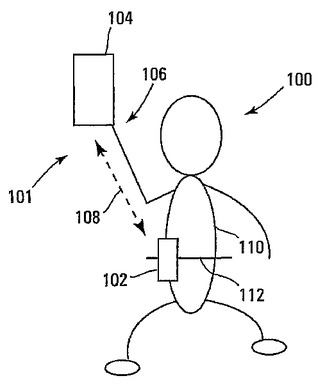 (もっと読む)
(もっと読む)
車両の制御装置
【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 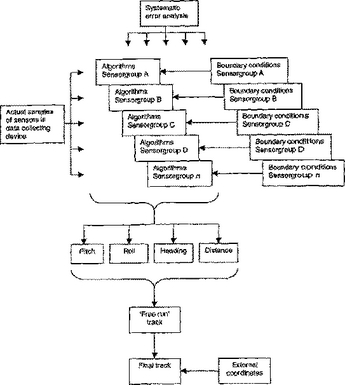 (もっと読む)
(もっと読む)
車両の相対方位検出装置
【課題】 ジャイロセンサを利用することなく、かつ、精度良く、車両の相対方位を検出することができる車両の相対方位検出装置を提供する。
【解決手段】 この相対方位検出装置は、車両のハンドル操作に基づいて車両の相対方位を検出するものであって、操舵角度検出手段50によりハンドルの操舵角度を検出し、絶対方位検出手段20によって車両の絶対方位を検出し、検出された操舵角度と絶対方位とに基づいて単位操舵角度あたりの方位変化量を係数として算出し、ハンドル操作時に操舵角度と予め求められている当該係数とに基づいて車両の相対方位を算出する。
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
二重積分によって計算された測定に関連した絶対位置測定を使用することにより固体の移動を検出するための方法
本発明は、二重積分によって計算された測定に関連した絶対位置測定を使用して、固体の移動を検出するための方法に関するものであって、例えば、人体の移動の検出を意図している。本発明による方法においては、固体(2)の加速度を測定し、この測定の二重積分を行い、これにより、固体の第1並進移動に関する順次的な値を獲得し、さらに、特に回転といったような固体の少なくとも1つの第2自由度に関するの絶対位置測定を行う。本発明においては、回転測定を、並進移動測定へと変換し、並進移動測定を使用して第1並進移動を修正する。  (もっと読む)
(もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
車両の情報出力システム及び情報出力方法
本発明は、車両の車両状態及び/又は環境状態を検出するための収集手段と、少なくとも2つの出力ポートを使用して情報を出力するための出力手段と、検出されたデータを処理して評価するための及びデータ評価に基づき情報を出力するための手段を制御するための評価及び制御装置とを備える車両の情報出力システムに関する。2つ以上の出力ポートの少なくとも1つを選択することができる。本発明はまた、関連の情報出力方法に関する。本発明によれば、評価及び制御装置は、検出されたデータを評価して、前記第1の情報を出力するために選択された出力ポートを介して、第1の情報の出力と第2の情報の出力との間に衝突が生じるかどうかを確かめ、衝突が検出された場合、第1又は第2の情報を出力するために出力ポートを変更する。あるいは、前記装置は、同一の出力ポートを介して第1又は第2の情報を出力するために要する時間を確認して、より短い時間を要する情報の出力に対して、より長い時間を要する情報の出力を遅らせる。必要時間が同一である場合、より高い優先性を有する情報が最初に出力される。 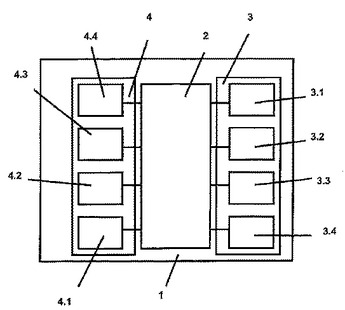 (もっと読む)
(もっと読む)
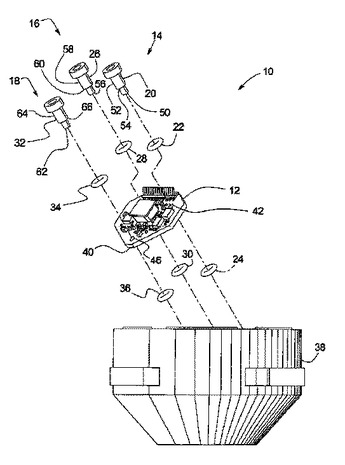
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
281 - 294 / 294
[ Back to top ]