
Fターム[2F129BB42]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | ドリフト (47)
Fターム[2F129BB42]に分類される特許
1 - 20 / 47
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
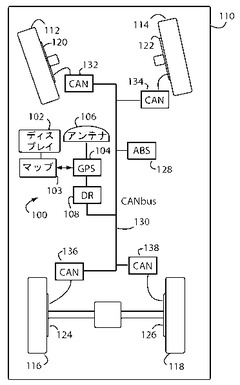
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
走行軌跡記憶装置

【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
密結合GPSおよび推定車両航法
【課題】密結合GPSおよび推測航法システムは、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両範囲および方向を演算する。
【解決手段】推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。車輪半径の連続的なキャリブレーションおよび速度効果に対する補正は、GPS fixから演算され、それは、GPS信号受信の長い休止期間中の推測航法性能および精度を改善する。GPS信号が回復されるとき、本推測航法解は、周囲を探索するGPS受信器のための高品位な開始点を提供する。
(もっと読む)
ジャイロ用ゼロ点補正方法及び装置
【課題】ジャイロ出力のゼロ点補正値を停車時のジャイロ出力信号によって得る時、ターンテーブルに乗って回転しているときのジャイロの出力をゼロ点補正値としないようにジャイロ出力の閾値を設定する際に、高性能のジャイロを必要とせず、また車両停止時に方位マークが回転し続ける問題を解決する「ジャイロ用ゼロ点補正方法及び装置」とする。
【解決手段】車両の停止判定時に、ジャイロの出力によってそのゼロ点補正値を算出するとき、ジャイロの標準出力値の上下に、車両がターンテーブルに乗って回転している時のジャイロの出力以内の範囲に閾値を設定する。車両の停止判定時のジャイロの出力が、閾値の範囲外にあることを検出したときから継続して閾値を超えている経過時間を算出し、経過時間が1分等の所定時間を超えたとき、車両はターンテーブルに乗っていなかったと判定して、車両の停車判定開始時のゼロ点補正値を採用する。
(もっと読む)
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
(もっと読む)
校正データ取得方法、加速度センサー出力補正方法及び校正データ取得システム
【課題】ミスアライメント誤差を考慮しつつ、慣性センサーの温度特性を適切に求めるための新たな手法を提案すること。
【解決手段】試験システム1において、加速度センサー520を具備するセンサーモジュール5の特性判定処理が行われる。すなわち、試験装置3において、絶対軸が定められた被検体固定装置340に、加速度センサー520の検出軸の方向を絶対軸方向とするようにセンサーモジュール5が固定される。そして、センサーモジュール5の姿勢及び恒温槽320内部の温度を変化させながら、加速度センサー520の出力値を記録するデータ取得処理が行われる。そして、記録された加速度センサー520の出力値を用いて、補正係数算出装置2により温度依存成分の温度係数及びミスアライメント係数が補正係数として算出される。
(もっと読む)
ナビゲーション装置
【課題】道路傾斜による影響を排除し取付角度を正確に求めることができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に取付をした取付台に任意の角度で設置することができるナビゲーション装置1であって、互いに直交する3つの軸の各方向の加速度を検出する3軸加速度センサ4と、ナビゲーション装置1の取付角度を算出する制御部2とを備え、制御部2は、3軸加速度センサ4が車両走行中に検出した加速度の2つの軸についてそれぞれの方向の加速度である第1および第2加速度を取得し、この第1および第2加速度の絶対値の比率および加速度の極性により取付角度を算出する。
(もっと読む)
ヨーレート補正装置、及びその方法
【課題】ヨーレートセンサによって検出されるヨーレートを補正することのできるヨーレート補正装置、及びその方法を提供する。
【解決手段】自車両の走行方向の画像を撮像する撮像手段と、画像における自車両の旋回時の消失点を第1の消失点として検出し、当該画像における自車両の直進時の消失点を第2の消失点として検出する消失点検出手段と、第1の消失点と第2の消失点との画像上の水平方向の間隔に基づき、自車両のヨーレートを推定ヨーレートとして推定する推定手段と、自車両のヨーレートを検出する検出手段と、推定ヨーレートに基づきヨーレートを補正した補正ヨーレートを算出する補正手段とを備える。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
車載角速度検出装置
【課題】角速度をより適正に計測すること。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
(もっと読む)
車両姿勢角推定装置及びセンサドリフト推定装置
【課題】ドリフト誤差による影響を軽減して、精度よく姿勢角を推定することができるようにする。
【解決手段】前後車体速度を推定する前後速度推定手段12と、横車体速度を推定する横速度推定手段10と、ピッチ角速度を推定するピッチ角速度推定手段24と、ロール角速度センサ20及び上下加速度センサ14からのセンサ信号について、初期不感帯を設定するように補正する初期不感帯補正手段23と、各センサ信号、補正されたロール角速度センサ20及び上下加速度センサ14からのセンサ信号、前後車体速度の推定値、並びにピッチ角速度の推定値に基づいて、ロール角及びピッチ角を推定する姿勢角オブザーバ26と、を備えている。ピッチ角速度推定手段24は、前後車体速度の推定値、横車体速度の推定値、補正されたロール角速度及び上下加速度の各検出値、並びに推定されたロール角及びピッチ角の前回推定値に基づいて、ピッチ角速度を推定する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】移動体が傾斜のある場所を移動している際にも、加速度センサの出力に含まれるセンサ固有の誤差の補正が可能で精度よく移動体の現在位置を算出することが可能なナビゲーション装置を提供する。
【解決手段】所定時刻taのGPS速度Vg(ta)と時刻taから算出間隔経過後の時刻tbのGPS速度Vg(tb)の差分が許容値より小さいことにより移動体が等速度であると判定し、前回等速度と判定した時刻t1の加速度センサの出力値である加速度Axの平均値Ax1と、今回等速度と判定した時刻t2の加速度Axの平均値Ax2が一致することにより、時刻t1と時刻t2に移動体が移動する斜面の傾斜角θが同一として前記傾斜角θを求め、前記傾斜角θを用いて加速度センサの誤差αを補正値として算出し、加速度センサの出力を前記補正値により補正した値を用いて、移動体の現在位置を算出する。
(もっと読む)
加速度センサのゼロ点補正装置及び駐車支援装置
【課題】傾斜する路面に停車した場合でもゼロ点補正に必要な処理を実行可能な加速度センサのゼロ点補正装置の提供
【解決手段】本発明によるゼロ点補正装置は、車両位置を検出する車両位置検出手段と、停車状態を検出する停車状態検出手段と、停車状態で得られる加速度センサの出力値を、そのときの車両位置に対応付けて記憶する記憶手段と、前記記憶手段に記憶された前記加速度センサの出力値(記憶値)と、該記憶値に対応する車両位置に再び停車した際に得られる前記加速度センサの出力値とを比較し、該比較結果に基づいて、前記加速度センサのゼロ点を補正するゼロ点補正手段とを備えることを特徴とする。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】GPSによる測位と慣性航法による測位とを行う測位装置において、消費電力の
削減を図ること。
【解決手段】カーナビゲーション装置1において、GPS衛星信号の受信状況を示す指標
値が、予め定められた第1低レベル条件を満足するか否かが判定され、満足すると判定さ
れた場合には、慣性航法用センサを起動状態(ON)とし、満足しないと判定された場合
には、慣性航法用センサを停止状態(OFF)とする制御が行われる。また、第1低レベ
ル条件を満足すると判定された場合には、上述した指標値が、第1低レベル条件よりもレ
ベルの低い第2低レベル条件を満足するか否かが判定され、満足すると判定された場合に
は、慣性航法演算処理が行われて慣性航法演算位置が出力位置に決定され、第2低レベル
条件を満足しないと判定された場合には、GPS受信部20により測位されたGPS測位
位置が出力位置に決定される。
(もっと読む)
携帯通信端末とその地磁気センサの誤差補正方法
【課題】地磁気センサにより検出される方位の情報を、ユーザが極力正しく把握することができる携帯通信端末、地磁気センサの誤差補正方法を提供する。
【解決手段】制御部160は、方位の情報を表示部155に表示させているときに、地磁気検出値の異常が所定時間以上持続したと判定した後、地図の表示をヘディングアップ表示からノースアップ表示に固定し、オフセット誤差補正処理を行う。オフセット誤差補正処理を行っている間は、ノースアップ表示を持続する。そして、この補正後の地磁気検出値に基づいて方位が算出されたときに、ノースアップ表示を解除して、ヘディングアップ表示を再開させる。
(もっと読む)
飛翔体の測位装置
【課題】飛翔体が長時間にわたって加速を続けると、信号処理の基準周波数を発生する基準発信器において加速度による周波数ドリフトが生じるという問題があった。
【解決手段】飛翔体に搭載され且つ複数のGPS衛星からの信号を受信して自己の位置を測位する飛翔体の測位装置であって、基準周波数を発生する基準発信器12と、飛翔体に生じた加速度を計測する加速度計13と、加速度計13で計測した加速度に対応する基準発信器の周波数ドリフトを算出する第1補正手段14を備え、第1補正手段14により、算出した周波数ドリフトに基づいて実際に生じた基準発信器12の周波数ドリフトをキャンセルすることで、加速度により生じる基準発信器12の周波数ドリフトを解消した。
(もっと読む)
携帯通信端末とその地磁気センサの誤差補正方法
【課題】地磁気センサにより検出される方位の情報を、ユーザが極力正しく把握することができる携帯通信端末、地磁気センサの誤差補正方法を提供する。
【解決手段】制御部160は、地磁気検出値の異常が所定時間以上持続したと判定した後、方位の補正を行っている間、表示部155に表示される方位の情報の精度が低いことを表示部155に表示させる。制御部160は、例えば、方位を表すコンパスの画像を左右に振らせたり、コンパスの形、色、サイズ等を変化させたり、方位の精度低下を表す別の画像を表示させるなどの方法により、方位の精度低下の情報を表示部155に表示させる。
(もっと読む)
移動体用測位装置
【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
端末装置、端末装置の制御方法、端末装置の制御プログラム。
【課題】端末装置が正確な時計や標準電波を受信するための専用のハードウエアを持つ必要がないにもかかわらず、時刻精度の高い時刻情報を取得することができる測位システム等を提供すること。
【解決手段】情報提供装置20は、衛星時刻情報に基づいて、外部イベント発生のタイミングを補正する外部タイミング信号補正手段と、外部イベントを送信した時の衛星時刻を示す送信時刻情報を生成する送信時刻情報生成手段等を有し、端末装置50は、外部イベントの受信と、内部イベントの発生の間におけるクロック数を示すイベント間クロック数情報を生成するイベント間クロック数情報生成手段と、イベント間クロック数情報に基づいて、外部イベントの受信と、内部イベントの発生の間の時間を示す時差情報を生成する時差情報生成手段と、送信時刻情報及び時差情報に基づいて、内部イベントの発生時刻を示す内部時刻情報を生成する内部時刻情報生成手段等を有する。
(もっと読む)
1 - 20 / 47
[ Back to top ]