
Fターム[3B150NA11]の内容
Fターム[3B150NA11]の下位に属するFターム
Fターム[3B150NA11]に分類される特許
1 - 20 / 45
空環縫込み装置付きオーバーロックミシン
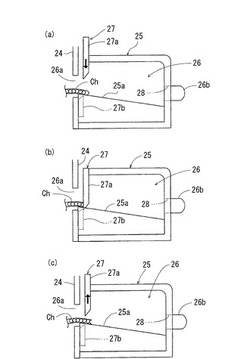
【課題】空環切断後のミシン側に残った空環の自由端は吸引切断直後に空環吸引管の吸入孔から吸引通路外へこぼれ落ちることなく、吸引通路内に確実に吸引され、空環を確実に吹き返すことができ、安定した空環縫込みを実現できるようにする。
【解決手段】布地Nの後端に形成したシームに連なって作り出された空環Chを、針板2の針落ち部5より後方側に設けられた空環吸引管25の吸入孔26aに吸引して該吸入孔26a内で切断し、ミシン側に残った空環Chの自由端を針落ち部5の手前側の針板2面上に風圧により吹き出し移動させ、この移動してきた空環Chを針落ち部5の手前側で挟持し、この挟持した空環Chを次の布地Nに形成されるシーム中に縫い込むようにした空環縫い込み装置を備えたオーバーロックミシンにおいて、空環吸引管25の内底面25aが正面側からみて右下がりに傾斜した斜面に形成されている。
(もっと読む)
ミシン

【課題】送り歯沈下位置と送り歯上昇位置とに送り歯を切り替えるにあたり、既設の送り調節器用のアクチュエータで兼用し、送り歯沈下機構を廉価に製造させるのに有利なミシンを提供する。
【解決手段】送り機構21は、送り歯22に搬送運動を実行させる送り機構21と、送り歯22の送り量を変更するための送り調節器13と、送り調節器13の送り量を変更するためのアクチュエータ30と、送り歯22を針板上面よりも突出可能とさせる送り歯上昇位置と送り歯22を針板上面よりも沈下させる送り歯沈下位置とに送り歯22を切り替えるための可動子41と、アクチュエータ30の作動により可動子41を送り歯沈下位置に切り替える送り歯沈下モードと、アクチュエータ30の作動により可動子41を送り歯上昇位置に切り替えて送り歯22の搬送運動を可能とさせる送り歯上昇モードとを切り替える沈下上昇切替機構40とを備えている。
(もっと読む)
裁縫機及びその駆動制御方法
【課題】本発明は、回転可能なヘッドを備える裁縫機を提供するためのものである。
【解決手段】本発明の回転可能なヘッドを備える裁縫機は、上記裁縫機を支持固定できるように多数の支持ポストと支持バーを用いてボックス形態に形成される裁縫機フレーム、上記裁縫機フレームの上に載置される裁縫機本体、上記裁縫機本体の先端部に設置されて、ヘッド部回動手段を用いて回動可能に形成されるヘッド部、上記ヘッド部の下部に設置されて、ベッド部回動手段を用いて回動可能に形成されるベッド部、上記裁縫機フレームの上に載置された上記裁縫機本体をX軸方向に移送させるX軸移送手段、上記裁縫機フレームの上に載置された上記裁縫機本体をY軸方向に移送させるY軸移送手段、及び上記裁縫機フレームの前面部に備えられて作業対象である被縫製物が支持固定される裁縫物固定フレームを含む。
(もっと読む)
ミシン
【課題】部品について過剰に高精度な寸法精度、部品について過剰に高精度な組付精度が要請されることが軽減される利点が得られるミシンを提供する。
【解決手段】送り歯22が針板29の上面29uよりも下方に退避する退避状態を開始する退避開始タイミングを報知するためのタイミング情報が設定されたタイミング設定部12bと、タイミング設定部12bの退避開始タイミングに関するタイミング情報を検知し、その検知信号を制御部に出力するセンサ14とが設けられている。タイミング設定部12bにおいては、送り歯22が針板29の上面29uよりも下方に退避する退避状態を開始する退避開始タイミングについて、退避開始タイミングを速く検知するように、タイミング情報は前倒しされて設定されている。
(もっと読む)
シークイン送り装置を備えたミシン
【課題】シークイン連結体における切断箇所のずれや、縫糸のささくれ、あるいは糸切れを防止する。
【解決手段】縫い動作に伴って先頭のシークインをシークイン連結体(7)から切断するための切断機構(C)において、その切断タイミングとして、縫針(26)が被縫製体(H)に挿針されると略同時にシークインの切断を行うように構成する。例えば、切断機構(C)は、可動刃(21)と、縫い動作に伴って可動刃(21)に当接し該可動刃(21)を所定方向に付勢して該可動刃(21)によりシークインを切断させる当接部材(31)とを含み、当接部材(31)は、縫い動作時に縫針(26)に連動して被縫製体(H)を押え付けるための押え部材(29)に設けられている。
(もっと読む)
ミシン
【課題】フリーモーション縫製を簡単な操作によって実行させる機能を備えたミシンを提供すること。
【解決手段】移送手段と、縫製手段とを備えるミシンにおいて、単位縫目を形成するためのデータである単位データが生成される(S70又はS75)。S50で操作手段によって出力された出力信号と、S70又はS75で生成された単位データとに応じて、加工布の移送方向及び移送量を指示する座標データを含む縫製データが作成される(S105)。S105で作成された縫製データに従って、移送手段が駆動され、加工布を移送させるとともに、縫製手段が駆動され、加工布に単位縫目が形成される(S110)。
(もっと読む)
ミシン
【課題】 ジャージ生地のような柔らかく伸縮性があり、厚みのあるたわみ易い布を縫製する際、ループが形成されて目とびの発生が抑制され、良好な縫製ができ、且つコストの安いミシンを提供すること。
【解決手段】 機枠2と、機枠2に回転自在に支持されて針棒12を駆動する上軸3と、機枠2に回転自在に支持されて釜41を駆動する下軸17と、上軸3と下軸17を連結し上軸3の回転と下軸17の回転を同期するタイミングベルト22と、タイミングベルト22に常時接触するプーリ13、14を備え、テンションプーリ13、14の振り幅により上軸3と下軸17の位相を変える針釜タイミング調整機構23と、を備えるミシン100であって、針棒12に固定した針39が刺さった布のたわみを考慮して、針落ち位置に応じて針39と釜41との出会いのタイミングを調整する。
(もっと読む)
刺繍用ミシン
【課題】複数のヘッド毎に針棒、天秤、布押え等の機械要素をそれぞれ個別に駆動するための個別のモータを具備する刺繍用ミシンにおいて、モータの回転速度の変化や回転方向の変化が頻繁になっても応答性に支障がなく、また、上糸に対するテンションの大きさを制御し、特に、天秤が下降する際に上糸に付与されるテンションの大きさを制御することができる刺繍用ミシンを提供する。
【解決手段】針棒、天秤、布押えの各機械要素は、位置偏差算出工程(S21)、速度偏差算出工程(S24)、トルク偏差算出工程(S31)を経て各モータを制御するが、天秤については、天秤上死点から針棒下死点までの特定期間においては、天秤用モータの角度に応じて予め定められたトルクデータとモータに供給される電流値に基づくトルクの値とからトルク偏差(第2トルク偏差)の値を算出し、第2トルク偏差の値に従い天秤用モータを制御する。
(もっと読む)
玉縁縫いミシン
【課題】間欠送りを良好に行う。
【解決手段】 ミシンモータ16により上下動を行う左右一対の針棒と、各針棒を上下動させる針上下動機構と、載置台11上の身頃生地Cと玉布とを保持する大押さえ41と、大押さえをパルスモータ45により布送り方向に沿って移動させる大押さえ送り機構40と、大押さえを間欠的に送りながら縫製を行う玉縁縫いミシンにおいて、大押さえ送り機構は、パルスモータの間欠的な駆動を補助するサーボモータ46を有し、サーボモータが、パルスモータの間欠駆動における立ち上がりの加速時に加速トルクを付与し、停止前の減速時に減速トルクを付与するように制御するサーボ制御手段60を備えている。
(もっと読む)
ミシン
【課題】縫い糸を適切な長さに切断すること。
【解決手段】ミシンは、糸捕捉部を有する第1糸捕捉部材110と、針板の下方で針孔に接近して設けられた固定刃150と、縫い糸を捕捉する糸捕捉部を有する第2糸捕捉部材120と、第1糸捕捉部材の捕捉動作の後、第2糸捕捉部材を駆動させる動作装置と、糸切り信号に基づいて布送り用モータを駆動させて、送り調節機構が所定の逆送り設定量になるように制御すると共に、動作装置の駆動を制御する制御手段とを有し、制御手段が、第1糸捕捉部材及び第2糸捕捉部材を前進位置まで駆動させた後、ミシンモータにより水平釜を回転させて第1糸捕捉部材及び第2糸捕捉部材で縫い糸を捕捉する際に、送り調節機構の逆送り設定により、ボビンに対する送り歯301の相対位置を変化させて、縫い糸に所定量の弛みを与える。
(もっと読む)
ミシンおよびこのタイプのミシンを操作する方法
【課題】 機械ヘッド(3)と少なくとも1つの押さえ棒(18,30)とを有するミシン(1)であって、上記押さえ棒が、布の側に位置し布と相互作用するよう構成された圧力適用装置(14,29)に接続する布端部と、機械ヘッドの側に位置し圧力発生装置(20,31)と相互作用する機械端部とを有する、ミシンを改善して、構成にあたって比較的低い労苦で操作上のフレキシビリティを増加させる。
【解決手段】 圧力発生装置(20,31)が、サーボモータ(21)と伝達レバー(22)とを有し、伝達レバーは、サーボモータのモータシャフト(23)に耐トルク性に取り付けられ且つモータシャフト(23)から半径方向に間隔をおいて押さえ棒(18,30)の機械端部とプッシュ連結している。
(もっと読む)
ミシンの返し縫い装置
【課題】返し縫いレバーの操作部を注意深く操作しなくとも、返し縫いレバーの操作部から操作者の指や肘が滑って誤操作を引き起こしてしまうことを防止することができるミシンの返し縫い装置を提供する。
【解決手段】本発明のミシン2およびその返し縫い装置1は、送り歯11を動作する布送り機構20、送り歯11の送り方向を正逆自在に切り替える切替軸6a、切替軸6aを操作する返し縫いレバー5ならびに返し縫いレバー5、切替軸6aおよびミシン機枠2aに連結した2本のリンク部材7、8を備える。2本のリンク部材7、8は平行に配設されており、返し縫いレバー5、2本のリンク部材7、8、切替軸6aおよび支持軸9bは2本のリンク部材の連結孔7a、7b、8a、8bを回り対偶とする平行四辺形の四節機構を形成している。
(もっと読む)
ボタン穴かがり縫いミシン
【課題】被縫製物の厚さに合わせて適切な切断圧力で被縫製物を切断すること。
【解決手段】メス30とメス受け50とを有し、これらによって被縫製物Cにボタン穴を形成するボタン穴かがり縫いミシン1は、メス又はメス受けを原点位置と切断終了位置との間で往復移動させるパルスモータと、パルスモータの駆動を制御する制御手段と、パルスモータの実際の回転パルスを検出するエンコーダと、制御手段からパルスモータに出力される駆動パルスと、エンコーダで検出されたパルスモータの実際の検出パルスとの位置偏差を算出する位置偏差算出手段と、駆動パルスと実際の検出パルスとの許容限界を記憶する偏差記憶手段と、を備え、制御手段は、偏差算出手段により算出された偏差が許容限界を超えた場合に、メス又はメス受けが切断終了位置に到達するまでの間、位置偏差が減少するように駆動パルスを補正してパルスモータに出力する。
(もっと読む)
ミシン
【課題】縫製中の芯紐を安定させて、縫い目からのはみ出しや縫製中の詰まりを防止し、芯紐入りの鳩目縫いを美しく縫製する。
【解決手段】ボタン径から必要な縫製長さを算出すると共に、算出した縫製長さのボタンホール縫いを行う制御手段を備え、ボタンホール縫い目の形成の際に、当該ボタンホール縫い目を補強する芯紐Tをボタンホール縫い目の形成と共に被縫製物Cに縫いつけるミシンは、折り曲げられた芯紐Tの折曲部T1を保持する芯紐保持部Nと、押さえ枠22に形成され、折り曲げられた芯紐の各端部側を係止する芯紐係止部22dと、を備え、制御手段は、芯紐保持部で芯紐の折曲部を保持すると共に芯紐係止部で折り曲げられた芯紐の各端部側を係止した状態で、折曲部に最初に針落ちさせて被縫製物に鳩目ボタンホール縫い目を形成する。
(もっと読む)
ミシン
【課題】縫製の途中で異常が発生しても最初から縫製をやり直す必要がなく、被縫製物の傷みを防止し、作業効率を向上すること。
【解決手段】ミシン10は、縫製中に異常が発生した場合に、ミシン10の動作を停止させる入力を行うと共に送り量検出手段24により検出された異常発生時点での送り量と、縫製データから求まる針落ち位置と、を記憶させる旨の入力を行う指示入力手段90と、指示入力手段からの入力があった場合に、送り量と針落ち位置とを記憶する記憶手段32と、指示入力手段からの入力により縫製を中断した後、縫製を再開する旨の入力を行う再開入力手段91と、を備えている。そして、制御手段3は、指示入力手段からの入力があった場合に、送り量と針落ち位置とを記憶手段に記憶させると共に、再開入力手段からの入力があった際に、記憶手段に記憶された送り量と針落ち位置とに基づいて、縫製が中断した位置から縫製を再開させる。
(もっと読む)
ミシンの制御装置
【課題】電源投入直後の主軸の回転角度の検出が不確定となる期間を短くし、起動性を良くし、回転角度管理に基づく駆動制御のできる制御装置を提供する。
【解決手段】主軸の回転信号出力手段21と、針が基準位置より上方に位置するか否かを検出する針位置検出手段20と、回転信号を計数する計数手段26と、主軸の検出角度を記憶する記憶手段24と、主軸回転角度算出手段27とによりモータとミシンの各アクチュエータ15,16,17を制御する制御手段28とを設けたミシンの制御装置5において、記憶手段は、針が基準位置より上方に位置する期間を回転信号の出力数により記憶し、電源投入時に針が基準位置より上方に位置することが検出された場合には、主軸の回転に伴って針が基準位置より下降するタイミングを契機として、記憶手段に記憶された回転信号の出力数を初期値として回転信号の計数を更新する。
(もっと読む)
シークイン送り装置
【課題】 シークインの実際のサイズを検出し、シークインテープの送り量を高精度に自動調整できるシークイン送り装置を提供する。
【解決手段】 このシークイン送り装置1は、シークインSが直列に連結されたシークインテープTをミシンの縫付位置Pに向けて送る送り機構24と、シークインSのサイズを検出する光センサー機構74と、光センサー機構74の出力に基づいて送り機構24のステッピングモータ39を制御するコントローラとを備えている。光センサー機構74に、テープTに光を照射する光源と、シークインSの縫付穴Hを通過した光に感応して検出信号を出力する複数の受光センサーとを設ける。各受光センサーをそれぞれ複数の受光素子で構成し、すべての受光素子をテープTの送り方向に配列する。
(もっと読む)
シークイン送り装置
【課題】 シークインの擦り傷を防止し、シークインテープの送り量を自動的に調整できるシークイン送り装置を提供する。
【解決手段】 シークインSが直列に連結されたシークインテープTを送り機構24によりミシンの縫付位置Pに向けて送り出す。送り機構24はテープTの表面に接合する第一ベルト22と、テープTの裏面に接合する第二ベルト23と、二本のベルト22,23を回転するステッピングモータ39とを備える。ベルト22,23を上下に重ね合わせ、ミシン針の上下動通路Npに対し斜状に張設する。ベルト22,23はテープTを挟み付け、先頭のシークインSがカッター20を通過する位置までテープTを自動的に送り出す。
(もっと読む)
シークイン送り方法及び装置
【課題】 部品交換を必要としない簡単な調整により、多種類のシークインを送り出すことができるシークイン送り方法及び装置を提供する。
【解決手段】 このシークイン送り装置1は、シークインSが直列に連結されたシークインテープTを基準線Lに沿わせてミシンの縫付位置Pに送る送り機構24と、シークインSの縫付穴Hを送り機構24よりも上流側の基準線L上に係止する係止機構53と、基準線Lの左右両側でテープTを基準線Lと平行に案内する二つのガイド49,50と、ガイド49,50をテープTの幅方向へ個別に調整する調整機構54とを備えている。送り機構24は、テープTを挟み付ける上下二本のベルト22と、ベルト22を回転するステッピングモータ39とを備えている。
(もっと読む)
ミシン
【課題】 ペン機構を装着した針棒の高さをミシンモータにより上下に移動できること、しかもペン機構を用いたペン書き中における針棒の上下動を阻止でき、マークや線を綺麗にペン書きできるようにすることである。
【解決手段】 針棒7の下端部にチャック部17が設けられ、このチャック部にペン工具(ペン機構)20が着脱可能に装着されている。このペン工具20には、下向きでインクを含むペン部材と、このペン部材を下方に付勢する圧縮コイルバネが内蔵されている。ミシンモータが制御されると、ミシン主軸15の回転を介して針棒7を上下に駆動できるので、針棒の高さ位置が、ペン工具20による加工布へのペン書きが可能な下降位置と、ペン書きが不可能な上昇位置とに切換えるられる。
(もっと読む)
1 - 20 / 45
[ Back to top ]