
Fターム[3B150NC07]の内容
Fターム[3B150NC07]に分類される特許
1 - 20 / 22
生地供給装置
【課題】生地をミシンへ送り込む作業を自動化するような場合にあって、送り込みの途中で生地に弛み皺を発生させることがないようにし、またミシンの針落部に対して生地を真っ直ぐに送り込むことが確実に行えるようにする。
【解決手段】ミシン2の針落部3に向けて連設状に設置される生地テーブル5と、ミシン2へ生地Wを送り込む中間送り機構6とを有しており、中間送り機構6は、生地Wを生地テーブル5上へ押さえ付けながら駆動回転する送りローラ10と、この送りローラ10を生地テーブル5上の生地Wに対して送り方向Xと交差する方向Yで出入り移動させる出入り調節機構13とを有している。
(もっと読む)
ミシン

【課題】針が取り付けられた少なくとも一本の針棒の一回の運動サイクルの間に、針の運動および糸張力の最適化が可能となるように、ミシンを構成する。
【解決手段】ミンシ、特に二本針ミシンに、それぞれの針棒(12)とこれに連結されているそれぞれの天秤(16,17)用の専用針棒駆動モータが備えられる。それに対し布押さえ(36,38)および上部送り装置(37,40)は、アームシャフトに動力が伝達されるように接続される。
(もっと読む)
シート加工装置、シート加工方法及び加工シート
【課題】
シート部材にパンチ孔領域と縫い目領域を形成し、ミシン針がパンチ孔に入り込んで縫い目の形状を乱したり変形したりすることがないシート加工装置を提供する。
【解決手段】
シート加工装置11の穿孔装置21は、穿孔駆動装置41によって上下動するパンチ棒45を有し、パンチ棒45の先部にはパンチ46が固定されている。シート加工装置11の縫製装置61は、縫製駆動装置72によって上下動する針棒91を有し、針棒91の先部にはミシン針93が固定され、さらに、ミシン針93の針糸のループを引っ掛ける垂直釜71が設けられている。装置本体12は、穿孔装置21を移動させる穿孔移動手段31と、縫製装置61を移動させる縫製移動手段106と、穿孔移動手段31と縫製移動手段106を駆動制御すると共に、穿孔駆動装置41及び縫製駆動装置72を交互に駆動する制御手段120を有し、シート部材2にパンチ孔6と縫い目8を形成する。
(もっと読む)
ミシン
【課題】ミシンの縫製速度変化にも対応したステッピングモータの制御を行う。
【解決手段】ステッピングモータ76a,77aにより被縫製物の移動位置決めを行う位置決め機構120と、縫製パターンデータ71aに基づいてステッピングモータの動作制御を行う縫製制御手段73とを備え、ミシンの縫製速度を設定に応じて可変とするミシンにおいて、一針分の位置決め動作を行うステッピングモータの駆動パルス列の各パルスの出力時間間隔を定めた駆動パターンPを、複数の位置決め動作量及び複数の縫製速度について個々に記憶するパターン記憶部72を備え、縫製制御手段は、縫製パターンデータに定められた位置情報に基づく位置決め動作量と設定された縫製速度とに基づいて駆動パターンを選択し、ステッピングモータの動作制御を行う。
(もっと読む)
玉縁縫いミシン
【課題】間欠送りを良好に行う。
【解決手段】 ミシンモータ16により上下動を行う左右一対の針棒と、各針棒を上下動させる針上下動機構と、載置台11上の身頃生地Cと玉布とを保持する大押さえ41と、大押さえをパルスモータ45により布送り方向に沿って移動させる大押さえ送り機構40と、大押さえを間欠的に送りながら縫製を行う玉縁縫いミシンにおいて、大押さえ送り機構は、パルスモータの間欠的な駆動を補助するサーボモータ46を有し、サーボモータが、パルスモータの間欠駆動における立ち上がりの加速時に加速トルクを付与し、停止前の減速時に減速トルクを付与するように制御するサーボ制御手段60を備えている。
(もっと読む)
電子千鳥ミシン
【課題】針振り巾を設定することにより針振りパターンを任意の大きさに縮小ないし拡大でき針振りデータの作成が効率化できる電子千鳥ミシンを提供する。
【解決手段】主モータにより回転される主軸に連動して上下動される針と、針板上に出没して布を送る布送り歯を備えた布送り装置と、前記針を布送り方向との交叉方向に針振りさせる針振り機構との協働により布に縫目を形成する電子千鳥ミシンにおいて、針振りパターンに対応する針振りデータを記憶する手段と、針振り巾を設定する手段と、前記針振りデータの最大針振り巾又は右端針位置と左端針位置の間隔と前記設定針振り巾とに基づいて前記針振りデータを変形する手段と、変形された針振りデータに基づいて針振りパターンの縫目を形成する手段とを備える。
(もっと読む)
ミシン
【課題】
複数のミシン針をそれぞれ独立して往復動させ、各ミシン針によって形成される縫い目の形状を異ならせることができるミシンを提供する。
【解決手段】
ミシン本体2の駆動装置によって往復動する針棒41の先部には、ガイド部材51が固定されている。ガイド部材51には、ミシン針71を固定した複数の取付部材61A〜61Cを縫製方向Xと略直角の方向Yに案内する案内部52が形成されている。各取付部材61A〜61Cは、ミシン本体2に設けられた複数の動作手段A〜Cにそれぞれ連結部材80A〜80Cによって連結され、各動作手段A〜Cの作動により各ミシン針71を縫製方向Xと略直角の方向Yに往復動するように構成されている。
(もっと読む)
ミシンの針上下動機構
【課題】針棒ストロークの調節を容易に行う。
【解決手段】ミシンモータから動力を得て支軸39回りで回動を行う第一のベルクランク31と、第一のベルクランクに連結された第一の伝達リンク32と、第一の伝達リンク32と針棒側との間に介在する第二の伝達リンク33と、第一又は第二の伝達リンクに連結されて連結点38を移動可能な第二のベルクランク54と、第二のベルクランクの他端側に連結され、初期位置と前進位置に移動可能で、連結点を第一ベルクランク31の支軸39に重なる位置と前進位置への移動により重なる位置より離間した離間位置とに移動させるアクチュエータ52とを備え、第二のベルクランク又はアクチュエータ52に当接する第1ストッパ56を進退可能に連結し、アクチュエータの前進位置を調節する調節モータ53を有し、これにより連結点38の離間位置を調節して、針棒ストロークを調節する。
(もっと読む)
ミシンおよびこのタイプのミシンを操作する方法
【課題】 機械ヘッド(3)と少なくとも1つの押さえ棒(18,30)とを有するミシン(1)であって、上記押さえ棒が、布の側に位置し布と相互作用するよう構成された圧力適用装置(14,29)に接続する布端部と、機械ヘッドの側に位置し圧力発生装置(20,31)と相互作用する機械端部とを有する、ミシンを改善して、構成にあたって比較的低い労苦で操作上のフレキシビリティを増加させる。
【解決手段】 圧力発生装置(20,31)が、サーボモータ(21)と伝達レバー(22)とを有し、伝達レバーは、サーボモータのモータシャフト(23)に耐トルク性に取り付けられ且つモータシャフト(23)から半径方向に間隔をおいて押さえ棒(18,30)の機械端部とプッシュ連結している。
(もっと読む)
縫製装置および表皮セット治具
【課題】表皮の治具へのセット作業性の向上、および上下表皮を外周縁どうしの位置合わせにずれなく正確に重ね合わすことができて縫い代の均一化を図る。
【解決手段】外治具1と内治具2からなる表皮セット治具3に、所定形状に裁断された少なくとも2枚の上下表皮を重ね合わせて該上下表皮外周縁が内治具2の外周から外方へ露出するようにセットする表皮セット部と、内治具2にセットされた上下表皮の外周縁部分を、縫い針を備えたミシン本体で縫合する縫製部を備える。外治具1は表皮セット部の定位置に設置され、下表皮位置決めガイド板12、下表皮位置決めガイド13、および上表皮押えクランプ14を備える。内治具2は、下表皮位置決めガイド板12の内側に取り出し可能に配置され、下表皮受けプレート22、上表皮4の外周縁部4aを下表皮5の外周縁部5aに押え付ける本クランプ機構23を備える。
(もっと読む)
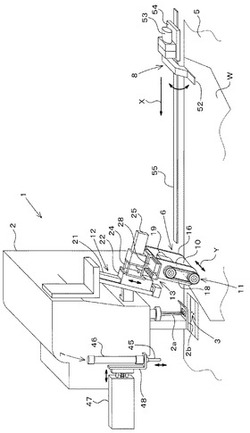
テープ縫付け装置および生地への印付け装置
【課題】薄い生地や伸びのある生地でも正確な印付けを行うことのできるテープ縫付け装置および印付け装置を提供する。
【解決手段】生地をX方向に広げた状態に載置可能なテーブル10と、このテーブル10上に載置された生地をY方向へ送る布送り手段40,50と、印を付けるマーカー部24と、このマーカー部24をテーブル10上に近接させたり離間させたりするマーカー駆動部250と、マーカー駆動部250をX方向に移動させるマーカー搬送手段(30〜32)とを備えている。
(もっと読む)
テープ縫付け装置
【課題】幅継ぎ線を中心に左右対称の位置にテープを縫い付ける場合でも、カーテン生地を180度回転させてテーブルにセットし直すような手間のかかる作業を必要としないテープ縫付け装置を提供する。
【解決手段】生地をX方向に広げた状態に載置可能なテーブル(10)と、このテーブル10上に載置された生地をY方向へ送る布送り手段(40,50)と、前記生地にテープを縫い合わせる縫製ヘッド(20)と、この縫製ヘッドを前記テーブル上の所定位置でX方向に移動させるヘッド搬送手段(30,31,32)とを備え、布送り手段(40,50)は、テーブル上の生地をY方向における順方向と逆方向とに設定長送ることが可能なように構成されている。
(もっと読む)
ミシンのXY軸モータ制御装置
【課題】被縫製物の移動量に基づいて、ミシン主軸に同期させた正確な位置決め制御を行なうことのできるXY軸モータ制御装置を提供する。
【解決手段】移動量検出センサと、移動量検出センサが検出する被縫製物の移動量からフィードバック用位置情報を演算する位置演算部と、X軸モータおよびY軸モータにそれぞれ配設されたエンコーダと、各エンコーダのエンコーダ信号に基づいてX軸モータおよびY軸モータのそれぞれのフィードバック用速度を演算する速度演算部と、制御部から与えられる縫製の位置情報およびフィードバック用位置情報に基づいてX軸モータおよびY軸モータのそれぞれの回転速度を算出する位置偏差演算器と、フィードバック速度および回転速度に基づいてX軸モータおよびY軸モータのそれぞれの回転トルクを算出する速度偏差演算器と、各回転トルクに基づいてX軸モータおよびY軸モータにそれぞれモータ電流を供給する電流アンプとを設ける。
(もっと読む)
ミシン
【課題】 ペン機構を装着した針棒の高さをミシンモータにより上下に移動できること、しかもペン機構を用いたペン書き中における針棒の上下動を阻止でき、マークや線を綺麗にペン書きできるようにすることである。
【解決手段】 針棒7の下端部にチャック部17が設けられ、このチャック部にペン工具(ペン機構)20が着脱可能に装着されている。このペン工具20には、下向きでインクを含むペン部材と、このペン部材を下方に付勢する圧縮コイルバネが内蔵されている。ミシンモータが制御されると、ミシン主軸15の回転を介して針棒7を上下に駆動できるので、針棒の高さ位置が、ペン工具20による加工布へのペン書きが可能な下降位置と、ペン書きが不可能な上昇位置とに切換えるられる。
(もっと読む)
ミシンの押え上げ装置
【課題】操作性および使い勝手の向上による高性能化を確実に図ることのできるミシンの押え上げ装置を提供する。
【解決手段】操作手段13と、操作手段13の操作入力により駆動されるアクチュエータ9と、アクチュエータ9の駆動力により押え棒2を上下動させる駆動力伝達手段10と、操作手段13の操作量を検出する操作量検出手段14と、縫製に供する縫製対象布Tの厚さtを検出する布厚検出手段12と、ミシン各部の動作の制御を司る制御手段11とを備え、制御手段11には、操作位置判別部19が操作手段13の操作位置を第1上昇位置と判別した場合、布押え4の高さ位置が第1上昇位置設定手部18により算出されて固定値記憶部17に記憶されている第1上昇位置となるようにアクチュエータ9を駆動制御する押え上げ動作制御部20を設ける。
(もっと読む)
ミシン
【課題】上糸保持機構を別途設けずに、縫製開始時に上糸端部が加工布の下側へ抜け出すことを、布押えの上下駆動装置を用いた簡単な構成により確実に防止し、1針目から縫目を形成できるようにする。
【解決手段】布押え上下駆動装置10に布押え上下動位置変更機構13を設け、そのアクチュエータを制御して、縫製動作に同期して上下に移動する布押え6の上下動範囲を、縫製開始から所定針数を縫う間、下方へ変更することで布押えで上糸端部を針板と加工布に押圧すると共に、その後は布押えを通常縫製位置へ切換える布押え制御手段を設けた。縫製開始直後、布押え6は針板上面に押圧されるため、縫針9の目孔から延びる上糸15の端部を針板2a上の加工布Wに押圧することができる。
(もっと読む)
モータ制御装置
【課題】上位コントローラに負担を掛けずに、一定の保持ブレーキを維持したままでワーク停止位置を調整できるモータ制御装置を提供する。
【解決手段】位置指令量とモータの位置フィードバック量との偏差をゼロにするようにモータ電流を制御する制御手段1と、制御手段1の出力であるモータ電流指令を最大電流制限値または最小電流制限値で制限する電流制限手段8と、最大電流制限値または最小電流制限値を状況に応じて選択する電流制限切替手段9と、最小電流制限値が選択され且つモータ電流が最小電流制限値で制限されている期間には、位置フィードバック量を位置位置指令量に自動的に加算したモータ電流指令が、最小電流制限値を超えないように抑制する位置指令加算手段10とを備え、電流制限切替手段9はモータ停止時に最小電流制限値を選択し、一定の保持ブレーキを維持したままワーク停止位置を調整する。
(もっと読む)
曲線自動縫製方法及びその装置
【課題】 円や円弧はもちろん楕円や楕円弧あるいはS字等の複合曲線でも用意に自動縫製することのできる曲線自動縫製方法及びその装置を提供する。
【解決手段】 縫製生地(W)の外周縁部分を露出させて、重ね合せてセットした縫製生地(W)を着脱可能に挟着保持する縫製生地保持具(5)と、この縫製生地保持具(5)に保持されている縫製生地(W)の外周縁部分を縫製用ミシン(4)で縫合する曲線自動縫製方法である。縫製生地(W)をセットした縫製生地保持具(5)を縫製装置の所定位置に水平回転可能に支持させる。縫製生地保持具(5)の支持位置に対して縫製用ミシン(4)を直線的に接離移動させるとともに、縫製用ミシン(4)をミシンの針軸(N)を中心に水平回動可能に支持させる。縫製生地保持具(5)の回転に基づき、縫製用ミシン(4)を接離移動および針軸周りに回動するように制御しながら縫製生地の外周縁部分を縫合する。
(もっと読む)
水平多針キルティング機械および方法
多針キルティング機械(10)および方法においては、個別駆動可能な2つのブリッジ(21,22)を使用し、各ブリッジは、選択的に駆動可能な複数のチェーンステッチ部材を備えている。材料(12)およびブリッジ(21,22)の一方または双方を、フレーム(11)に対して移動させることができる。制御スキームにより、連続な型模様や、互いに離間した複数の型模様や、互いに連結された様々な型模様や、360度にわたる型模様や、互いに近接配置された複数の型模様が、キルティングによって形成される。好ましくは、各ブリッジ(21,22)に関して、単一の駆動サーボモータ(35,36,45,46)が使用され、針駆動部とルーパ駆動部とは、差動伝達機構によって互いに位相差を有して駆動される。  (もっと読む)
(もっと読む)
ミシンのモータ制御回路
【課題】モータの回転速度の検出を安価に、かつ、環境温度、ミシントルクに依存されることなく回転速度制御できること。
【解決手段】 目標速度nからモータ側速度として換算したミシン速度Mを減算して求めた速度補正値△δを加算した補正目標実速度Wを算出し、それをモータ3の回転指示を行う目標速度nに加算してモータ速度偏差値△Vを算出し、モータ速度偏差値△Vによって駆動回路4のパルス幅を設定するものであるから、環境温度、ミシントルクに依存されることのない制御とする。したがって、位置センサ8のような機械的なパルス発生器によって常に回転速度が監視し、逆起電力検出回路2の出力を補正しているから、高価な機械的なパルス発生器を複数使用することなく、かつ、廉価な逆起電力検出回路2の出力を補正して使用することにより、モータ3の回転速度の検出を安価に、環境温度、ミシントルクに依存されることなく回転速度制御できる。
(もっと読む)
1 - 20 / 22
[ Back to top ]